
В настоящее время у большинства специалистов, эксплуатирующих насосное оборудование, уже сложилось четкое представление о возможностях использования преобразователей частоты для привода насосов и насосных агрегатов. Понимание этого вопроса обусловлено интенсивным внедрением частотно-регулируемого привода за последние годы и накопленным опытом его эффективного использования.
Для всех видов перекачиваемой жидкости преобразователи частоты обеспечивают более экономичное, более эффективное и более надежное регулирование, чем известные механические способы. Независимо от области использования (добыча и транспорт нефти, электроэнергетика, жилищно-коммунальное хозяйство и т.д.) эффект от частотного регулирования насосов общеизвестен:
- экономия электроэнергии до 30 – 60 %;
- снижение утечек жидкостей до 5 %;
- экономия тепловой энергии до 10 %;
- увеличение срока службы оборудования в 1.5-2 раза;
- уменьшение вероятности возникновения разрывов трубопроводов;
- повышение эффективности защиты электропривода;
- улучшение экологической обстановки.
1. Основные сведения о частотно-регулируемом электроприводе
Частотный преобразователь в комплекте с асинхронным электродвигателем позволяет заменить электропривод постоянного тока. Системы регулирования скорости двигателя постоянного тока достаточно просты, но слабым местом такого электропривода является электродвигатель. Он дорог и ненадежен. При работе происходит искрение щеток, под воздействием электроэрозии изнашивается коллектор. Такой электродвигатель не может использоваться в запыленной и взрывоопасной среде.
Асинхронные электродвигатели превосходят двигатели постоянного тока по многим параметрам: они просты по устройству и надежны, так как не имеют подвижных контактов. Они имеют меньшие по сравнению с двигателями постоянного тока размеры, массу и стоимость при той же мощности. Асинхронные двигатели просты в изготовлении и эксплуатации.
Основной недостаток асинхронных электродвигателей – сложность регулирования их скорости традиционными методами (изменением питающего напряжения, введением дополнительных сопротивлений в цепь обмоток).
Управление асинхронным электродвигателем в частотном режиме до недавнего времени было большой проблемой, хотя теория частотного регулирования была разработана еще в тридцатых годах. Развитие частотно-регулируемого электропривода сдерживалось высокой стоимостью преобразователей частоты. Появление силовых схем с IGBT-транзисторами, разработка высокопроизводительных микропроцессорных схем управления позволили различным фирмам Европы, США и Японии создать современные преобразователи частоты доступной стоимости.
Электропривод насосных установок
... Регулированием частоты вращения насоса его рабочие параметры приводятся в соответствие с режимом работы обслуживаемой системы. Чтобы изменить частоту вращения насоса, необходим регулируемый электропривод (РЭП). Значение частоты вращения насоса, ... на выводах его статора, при этом частота такого напряжения постоянна и равна частоте сети переменного тока. Между выводами питающей сети и статора ...
Известно, что регулирование частоты вращения исполнительных механизмов можно осуществлять при помощи различных устройств: механических вариаторов, гидравлических муфт, дополнительно вводимыми в статор или ротор резисторами, электромеханическими преобразователями частоты, статическими преобразователями частоты. Применение первых четырех устройств не обеспечивает высокого качества регулирования скорости, неэкономично, требует больших затрат при монтаже и эксплуатации.
Статические преобразователи частоты являются наиболее совершенными устройствами управления асинхронным приводом в настоящее время.
Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что, изменяя частоту f 1 питающего напряжения, можно в соответствии с выражением
![]()
при неизменном числе пар полюсов p изменять угловую скорость магнитного поля статора.
Этот способ обеспечивает плавное регулирование скорости в широком диапазоне, а механические характеристики обладают высокой жесткостью. Регулирование скорости при этом не сопровождается увеличением скольжения асинхронного двигателя, поэтому потери мощности при регулировании невелики. Для получения высоких энергетических показателей асинхронного двигателя – коэффициентов мощности, полезного действия, перегрузочной способности – необходимо одновременно с частотой изменять и подводимое напряжение.
Закон изменения напряжения зависит от характера момента нагрузки Mс. При постоянном моменте нагрузки (Mс=const)напряжение на статоре должно регулироваться пропорционально частоте:
![]() .
.
Для вентиляторного характера момента нагрузки это состояние имеет вид:
![]() .
.
При моменте нагрузки, обратно пропорциональном скорости:
 .
.
Таким образом, для плавного бесступенчатого регулирования частоты вращения вала асинхронного электродвигателя, преобразователь частоты должен обеспечивать одновременное регулирование частоты и напряжения на статоре асинхронного двигателя.
2. Преимущества использования регулируемого электропривода в технологических процессах
Применение регулируемого электропривода обеспечивает энергосбережение и позволяет получать новые качества систем и объектов. Значительная экономия электроэнергии обеспечивается за счет регулирования какого-либо технологического параметра. Если это транспортер или конвейер, то можно регулировать скорость его движения. Если это насос или вентилятор – можно поддерживать давление или регулировать производительность. Если это станок, то можно плавно регулировать скорость подачи или главного движения.
Особый экономический эффект от использования преобразователей частоты дает применение частотного регулирования на объектах, обеспечивающих транспортировку жидкостей. До сих пор самым распространённым способом регулирования производительности таких объектов является использование задвижек или регулирующих клапанов, но сегодня доступным становится частотное регулирование асинхронного двигателя, приводящего в движение, например, рабочее колесо насосного агрегата или вентилятора.
Перспективность частотного регулирования наглядно видна из рисунка 1.
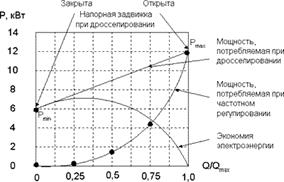
Рис. 1 – Зависимость экономии электроэнергии от потребляемой мощности.
Таким образом, при дросселировании поток вещества, сдерживаемый задвижкой или клапаном, не совершает полезной работы. Применение регулируемого электропривода насоса или вентилятора позволяет задать необходимое давление или расход, что обеспечит не только экономию электроэнергии, но и снизит потери транспортируемого вещества.
3. Структура частотного преобразователя
Большинство современных преобразователей частоты построено по схеме двойного преобразования. Они состоят из следующих основных частей: звена постоянного тока (неуправляемого выпрямителя), силового импульсного инвертора и системы управления. Звено постоянного тока состоит из неуправляемого выпрямителя и фильтра. Переменное напряжение питающей сети преобразуется в нем в напряжение постоянного тока. Силовой трехфазный импульсный инвертор состоит из шести транзисторных ключей. Каждая обмотка электродвигателя подключается через соответствующий ключ к положительному и отрицательному выводам выпрямителя. Инвертор осуществляет преобразование выпрямленного напряжения в трехфазное переменное напряжение нужной частоты и амплитуды, которое прикладывается к обмоткам статора электродвигателя.
В выходных каскадах инвертора в качестве ключей используются силовые IGBT-транзисторы. По сравнению с тиристорами они имеют более высокую частоту переключения, что позволяет вырабатывать выходной сигнал синусоидальной формы с минимальными искажениями.
4. Об л а с т и применения преобразователей частоты
4.1. При м енени е частотно-регулируемогоприводадля глубинных насосов
|
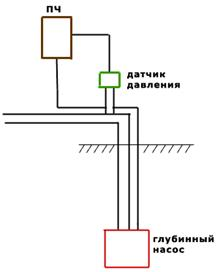
Рис. 2 – Структурная схема частотно-регулируемого привода глубинного насоса.
Преимущества применениячастотно-регулируемого электропривода:
1. Экономия электроэнергииот30до60%.
2. Исключение гидроударов,чтопозволяет резкоувеличитьсрок службы трубопроводови запорнойарматуры.
3. Отсутствиебольшихпусковыхтоков,полнаязащита электродвигателейнасосныхагрегатов,работаэлектродвигателейипусковойаппаратуры с пониженнойнагрузкой,чтозначительноувеличивает срок службы электродвигателей.
4. Значительная экономия водыза счёт оптимизациидавления в сетяхиуменьшенияразрывов трубопроводов.
5. Возможностьполностьюавтоматизировать насосныестанции.
6. Водак потребителю может подаватьсянапрямуючерез закрытые трубыбезнакопленияврезервуареили водонапорномбаке.
7. Нетребуетстроительства,обслуживанияводонапорныхбаковили накопительных резервуаров.
4.2. Р а ци о на л ьноеуправление насосными агрегатами канализационной насосной станции
|
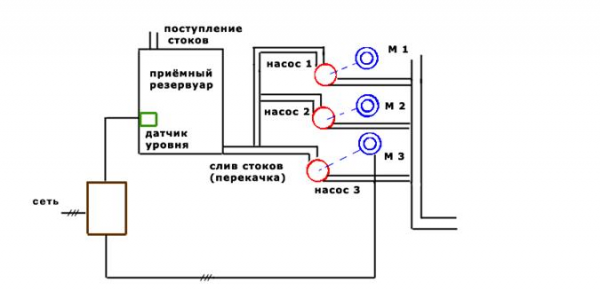
Рис. 3 – Структурная схема канализационной насосной станции.
Особенностиработыканализационнойнасоснойстанции:
1. Большую часть временинастанцииработает один насосныйагрегат.
2. Регулированиепроизводительностидросселированиемтрубопроводовобычно непредусматривается.
3. Перекачиваниестоковпроисходит приработе агрегатав режимепериодическихвключений.
Применениепреобразователейчастотыпозволяет:
1. Экономитьэлектроэнергиюзасчетуправлениянасоснымагрегатомпоспециальномуалгоритму,включающемувсебя:
- а) стабилизациюмаксимальнодопустимого уровняв приёмном резервуаре прибольших потоках;
- б)поддержаниеоптимальнойчастотыэлектродвигателяприснижении притока;
- в)исключениепотери электроэнергиинапусковыетоки;
2. Упрощается техническое обслуживание технологическогооборудования так какисключается большоеколичество пусков электродвигателей.
3. Обеспечиваетсяоптимальноепротеканиережимаперекачкистоковбезгидроударов.
4. Уменьшаетсячислокоммутационныхпереключений в силовыхцепяхицепяхуправлениянасоснымиагрегатами.
4.3. При м енени е частотно-регулируемогоприводавсистемах вентиляции и кондиционирования воздуха
Обычно вентиляторыимеюттакиеразмеры, чтобыобеспечить максимальныйрасход воздуха, требуемыйсистемой.
Однакоусловияфункционированиячастотребуютснижениярасхода.
Этоможетдостигатьсязасчётдросселирования при постояннойчастоте вращениявала вентилятора, атакжезасчётизмененияскорости вращения вала вентилятора прииспользованиичастотно-регулируемогопривода.
Производительность вентиляторачастоты можноменятьвзависимостиотсезонных, климатическихусловий, балансатеплоивлаговыделений, выделений вредных газовипаров.
Зависимость потребляемоймощности вентилятора от скорости вращениявалавентиляторатакаяжекакиуцентробежногонасоса Р=f(Q3),т.е. снижениескоростивращения вала вентилятораприводиткуменьшениюпотребляемоймощностив8раз. Экономия электроэнергии приприменении частотно-регулируемогоприводаможетсоставить до 60%.
Частотно-регулируемыйприводнабазепреобразователячастотыфирмы Hitachiможетиспользоватьсяпри применениидатчикаобратнойсвязинаколичество людейв здании,датчикапотока,разряженияит.д.
4.4. При м енени е частотно-регулируемогоприводав компрессорныхустановках
Работапоршневогокомпрессора существенноотличаетсяот работымеханизмовсвентиляторнойхарактеристикой,таккакмоментсопротивлениянаеговалуможносчитать постоянным.
Однакопроизводительностькомпрессоразависит от числа оборотовеговала.Прирегулированиипроизводительностикомпрессораизменениемчислаоборотовеговалаизменяетсяимощность,потребляемаяизсетиэлектродвигателем,приводящим компрессорвдвижение.Напромышленныхпредприятияхдостаточночастотребуется регулировать производительностькомпрессорныхустановок засчётступенчатогоизмененияскоростивращенияэлектродвигателя.
Из-за неравномерностипотреблениясжатоговоздуха приработе компрессора иногдаприходитсяоткрывать спускнойклапанвресиверекомпрессора.
Применениечастотно-регулируемогоприводакакпоказанонасхемепозволяет экономить электроэнергию,поддерживая оптимальноедавление приоптимальном расходе сжатоговоздухавсистемах пневматики.
|
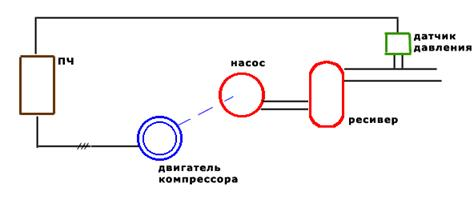
Рис. 4 – Структурная схема частотно-регулируемого привода компрессорной установки.
Приприменениичастотно-регулируемогоприводадляуправлениявинтовыми компрессорамиможнополучитьэкономиюэлектроэнергии,сравнимуюсэкономией приуправлениицентробежными насосами(до60%),т.к.характеристикавинтового компрессораблизкакхарактеристике центробежногонасоса.
Кроме получения экономииэлектроэнергии применение частотно-регулируемого привода дополнительнообеспечиваетследующее:
1. Снижается износ коммутационной аппаратурыиз-за отсутствия большихпусковых токов привключениидвигателякомпрессора.
2. Оптимизациядавления впневмосетиснижаетутечкисжатого воздуха.
3. Увеличивается срок службы электродвигателяиз-за сниженияегонагрузкииотсутствиятяжёлыхпусковыхрежимов.
4.5. При м енени е частотно-регулируемогопривода втягодутьевыхмеханизмах котельныхустановок
Тягодутьевыемашиныпотребляютоколо60%электроэнергиисобственныхнуждкотельныхцехов.Поэтомурегулированиеихрежимныхпараметровоказывает существенное влияниенамощность и экономичностьработыкотельныхустановок.
Использованиечастотно-регулируемыхприводовпозволяетрешатьзадачусогласованиярежимныхпараметровиэнергопотреблениятягодутьевыхмеханизмовсизменяющимсяхарактером нагрузкикотлов.
Основным назначением тягодутьевых механизмовиводогрейныхкотлов являетсяподдержаниеоптимальногорежимагорениявтопкекотла.Подпонятиемоптимального режимаздесьподразумеваетсяподдержаниеоптимальногосоотношения«топливо-воздух»исоздание наиболееблагоприятныхусловийдля полногосгораниятоплива.Длявыполненияэтогоусловиянеобходимос однойстороныподатьнужноеколичествовоздуха в топку–с другойс заданнойинтенсивностьюизвлекать изнеёпродуктыгорения.
Применениепреобразователейчастотыдля управлениявентилятора подачи воздуха в топку,а также вентиляторадымососа позволяет не толькоэффективно решатьэтузадачу,ноиавтоматизироватьэтотпроцесснаиболееполноиэффективно.
Как правило,система регулированиядымососа должна поддерживатьзаданнуювеличинуразряжениявтопкекотланезависимоот производительностикотлоагрегата.
Подачатопливавтопкукотладлясохранениябалансамеждуподводомтеплаиотводом еговыполняет существующая система управленияпроизводительностью котлоагрегата,регулируюподачутоплива.Сегоувеличениемувеличиваетсяподача воздухавтопкукотлаиэлектроприводдымососадолженувеличитьотсасывающийобъём продуктовгорения.Таким образом,связьмеждусистемамирегулирования вентилятораидымососаосуществляетсячерез топкукотла.
Посколькуграфик нагрузкиотопительнойкотельной достаточно неравномерный,уменьшение производительности,как вентилятора,такидымососа позволитсэкономитьдо70%электроэнергии,идущейнаприведениевдействиеэтихмеханизмов.
5. Принцип работы преобразователей частоты
Нарис. 5представленаблок-схемасиловойчасти преобразователяспромежуточнымзвеномпостоянноготока(так называемыйU-инвертор).
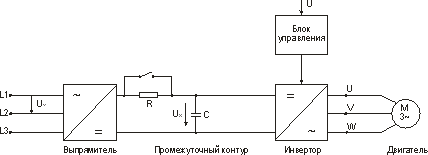
Рис. 5 – Блок-схема силовой части преобразователя
Напряжение сети U 1 стандартной частоты f1 подается на вход неуправляемого выпрямителя, преобразующего переменное напряжение U1 в постоянное E0 .
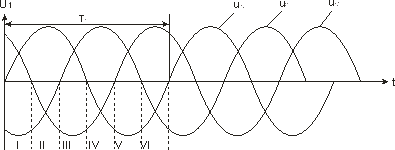
Рис. 6 – Входное напряжение сети
Выпрямленное и напряжение Е 0 подается на вход инвертора, который преобразует его в трехфазное напряжение U1рег регулируемой частоты f1рег , поступающее на двигатель. Частота выходного напряжения инвертора f1рег регулируется блоком управления в функции сигнала управления Uy .
Остановимся подробнее на работе управляемого инвертора (рис. 7), полагая, что с помощью управляемого выпрямителя на его вход подается постоянное напряжение Е 0 .
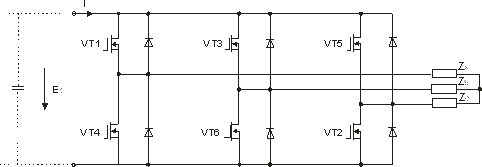
Рис. 7 – Коммутационная схема инвертирования
Предположим, что трехфазная нагрузка z А , zВ и zС (обмотки статора асинхронного двигателя) соединена в звезду, а транзисторы VT1…VT6, на которых выполнен инвертор, соединены по мостовой схеме и по сигналам с блока управления открываются в требуемой последовательности. Обычно продолжительность открытого состояния каждого транзистора l составляет половину или треть периода Трег =1/fрег , а сдвиг моментов открытия транзисторов VT1…VT6 – шестую часть этого периода. Рассмотрим сначала работу схемы со временем открытия транзисторов l=Трег /2. Временная токовая диаграмма работы транзисторов для этого случая показана на рис. 8, где токи фаз IA , IB , IC , проходящие через нечетные транзисторы, отложены в положительном направлении, а через четные – в отрицательном. В каждый момент времени включены (открыты) три транзистора из шести, причем за время периода можно выделить шесть интервалов (I, II, III, IV, V, VI) различных сочетаний открытых и закрытых состояний транзисторов. Для определения формы напряжения на нагрузке рассмотрим схемы включения фаз статора асинхронного двигателя на каждом из шести временных интервалов.
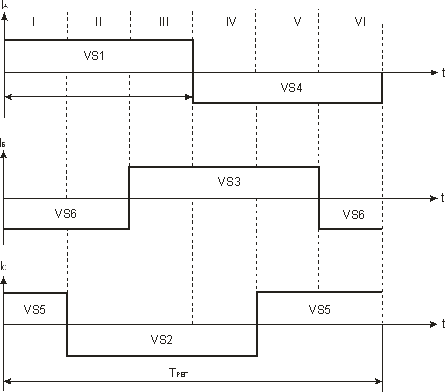
Рис. 8 – Временная токовая диаграмма работы транзисторов
В течение интервала I открыты транзисторы VT1, VT5 и VT6 начала фаз z А и zС соединены с плюсовым выводом источника +Е0 , а начало фазы нагрузки zВ – с минусовым выводом –Е0 (рис. 9,а).
Если при этом сопротивления всех трех фаз одинаковы, то эквивалентное сопротивление параллельно соединенных фаз нагрузок zА и zС будет в два раза меньше сопротивления фазы нагрузки zВ . Тогда и напряжение на параллельно соединенных фазах нагрузок zА и zС будет в два раза меньше, чем на фазе нагрузки zВ , и составит Е0 /3.
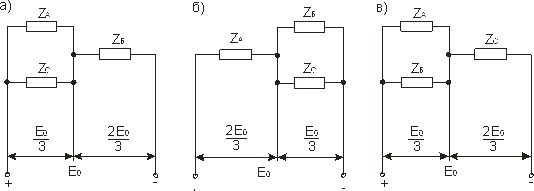
Рис. 9 – Схемы включения фаз статора
На интервале II (рис. 7) открыты транзисторы VT1, VT6 и VT2, фазы нагрузок z В и zС (рис. 9,б) включены параллельно, к ним прикладывается напряжение Е0 /3, а к фазе нагрузки zА – напряжение 2Е0 /3.
При переходе к интервалу III (рис. 7) закрывается транзистор VT6 и открывается транзистор VT3 (транзисторы VT1 и VT2 по прежнему открыты), в соответствии с чем фазы нагрузок z А и zВ включены параллельно (рис. 9,в).
Аналогично можно изобразить схемы соединения схемы соединения фаз обмотки статора для интервалов IV, V и VI, которые будут соответствовать схемам для интервалов I, II и III, но иметь другую полярность напряжения на началах фаз. График изменения напряжения на фазах нагрузки при l=Т рег /2 (рис. 10) имеет ступенчатую форму, и оно является переменным, причем максимумы этого напряжения сдвинуты по фазам на треть периода регулируемой частоты. Другими словами, на нагрузке получается стандартная система трехфазного напряжения переменного тока, хотя и несинусоидальной формы.
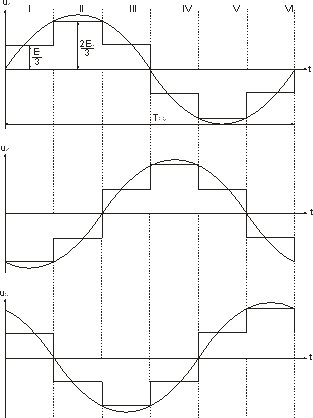
Рис. 10 – Напряжение на двигателе
6. Выбор преобразователя частоты
При выборе модели преобразователя частоты необходимо определить его выходную мощность (кВт) и выходной ток (А).
В самом простом случае выходную мощность и выходной ток преобразователя можно определить, зная параметры приводного электродвигателя.
На первом шаге при самостоятельном выборе модели известного типа частотного преобразователя рекомендуется поступать следующим образом:
1. Определить номинальный ток преобразователя, который необходимо выбирать равным номинальному току электродвигателя.
2. Определить полную выходную мощность преобразователя, ориентируясь на номинальную мощность электродвигателя.