Современное производство основано на разделении труда. Это обусловливает необходимость перевозки сырья, полуфабрикатов или готовой продукции с места добычи или производства к местам потребления.
Парк горных и транспортных машин, занятых в сфере горного производства, постоянно растет. Однако только количественного роста недостаточно для быстрого повышения производительности труда. Необходимы качественные изменения за счет увеличения единичной мощности машин и грузоподъёмности работающих с ними в технологической цепочке средств транспорта, создания более безопасного, надежного в эксплуатации и ремонтопригодного оборудования, обладающего повышенной комфортностью для экипажа и удобством в управлении.
Машины и оборудование, используемые на открытых горных работах, принято подразделять по роду выполняемой работы, то есть по технологическому признаку, на семь классов:
- Машины для подготовки горных пород к выемке;
- Выемочно-погрузочные машины;
- Выемочно-транспортирующие машины;
- Транспортные машины;
- Отвалообразующие машины;
- Сортировочно-обогатительное оборудование;
- Машины для вспомогательных работ.
Горные машины для открытых работ могут быть также классифицированы по видам используемой энергии, ходовому оборудованию, способу экскавации, массе и конструктивным признакам.
Комплексная механизация и организация работ на карьерах развиваются на основе внедрения поточной технологии, а также совмещения или в некоторых случаях разделения производственных процессов.
Поточную технологию легче осуществить при применении машин непрерывного действия. Однако возможно достижение поточности и при использовании экскаваторов цикличного действия.
- Я взял эту тему потому, что я хочу работать на экскаваторе в ГОКЕ и хочу сохранить традиции моего деда, отца и брата.
- Цель. Рассмотреть конструкции современных грузоподъёмных и грузозахватных приспособлений.
- Задачи:
Рассмотреть конструкции современных грузоподъёмных и грузозахватных приспособлений.
Изучить устройство и принцип действия экскаватора.
Изучить историю развития и совершенствования экскаватора.
Рассмотреть виды экскаваторов, работающих на КГОКе.
1. История
Ковш современного экскаватора. Вот его описание: “Ковш, заостренный, как лемех, спереди и сзади, имеет сито. Это Историю землеройной техники, в частности экскаваторов, можно начать писать с начала 15 века, когда в венецианском издании «Кодекса Джованни Фонтана» 1420 года был опубликован рассказ о ковшедолбежной землечерпалке, использовавшейся для углубления дна каналов, расширения морских гаваней. Но официально идея создания землеройных машин принадлежит Леонардо да Винчи, который в начале 16 в. предложил схемы экскаваторов-драглайнов. К 1500 году относится набросок чертежа грейфера для землечерпалки. Несколько лет спустя Леонардо руководил прокладкой каналов в засушливой Миланской долине. На земляных работах он применил землечерпалку собственной конструкции. В записных книжках ученого наряду с чертежами летательного аппарата есть зарисовки землечерпалки с ковшом-драглайном, а также сооружения, напоминающего конструкцию экскаватора. Драглайн, предложенный Леонардо да Винчи, в основных чертах напоминает позволит зачерпнуть много грунта и даст стечь воде. Ковш будет подвешен на канатах, которые наматываются на ворот, расположенный на понтоне. Дно ковша может также откидываться, что облегчит его разгрузку”.
История происхождения экскаваторов
... развитием электроэнергетической отрасли семимильными шагами развивались и конструкции экскаваторов. В 1905 году были выпущены первые паровые полноповоротные (с поворачивающейся кабиной) экскаваторы немецкой фирмой “Оренштейн & Коппель”. Ковши этих машин ... конструкции экскаваторов, его разновидностей. 1. История происхождения экскаваторов Историю землеройной техники, в частности экскаваторов, ...
Сейчас, правда, не выпускаются ковши-драглайны с откидным днищем, но этот принцип успешно применяется в ковшах для прямой лопаты. В 1597 году для очистки каналов в Венеции была сконструирована и построена плавучая землечерпалка. Автором ее был венецианский механик Буанаюто Лорини, который описал устройство машины в труде “Делле Фортификационе”. Далее в 1718 г. проект землеройного устройства с двумя ковшами представили Французской Академии наук механики де ла Бальм и Белидор. Механизм работал в портах Тулона и Бреста. Затем в 1795 году известный американский изобретатель, создавший первый практически пригодный пароход, Роберт Фултон сконструировал и первый четырехколесный грейдер-элеватор. Однако испытана машина была только через 70 лет на строительстве дорог в Америке. Но в 1796 году на дноуглубительных работах в английском порту Сандерленд была применена ковшовая драга с приводом от паровой машины. Построена она при участии изобретателя паровой машины Джеймса Уатта. За один рабочий ход ковши доставали со дна гавани до полутора тонн грунта, что примерно в 4 раза превышало производительность ручной драги. Большой вклад в развитие технологии экскаваторостроения внести французы: в 1860 году инженер М.
Кувре создал сухопутный цепной многоковшовый экскаватор с двигателем 15 лошадиных сил. Он был испытан на строительстве дороги Седан — Тионвиль, а позднее работал на сооружении Суэцкого канала. А уже 1862 году на улицах Парижа появился первый паровой каток с обеими ведущими осями. Изобретателем машины был механик Балейсон. Однако паровые катки большого распространения не получили. Ведь для поддержания необходимого давления в его котле требовалось сжигать 60-80 килограммов топлива в час. В начале 20 века, с развитием электроэнергетической отрасли семимильными шагами развивались и конструкции экскаваторов. В 1905 году были выпущены первые паровые полноповоротные (с поворачивающейся кабиной) экскаваторы немецкой фирмой “Оренштейн & Коппель”. Ковши этих машин вмещали до 4 кубометров земли. В 1910 году появились первые электрические экскаваторы, а американская фирма “Бюсайрус” выпустила в свет полноповоротный экскаватор на гусеничном ходу. Начиная с 1912 года начал работать первый экскаватор с двигателем внутреннего сгорания на гусеничном ходу.Русские изобретатели предложили немало интересных устройств, способствовавших облегчению тяжелого труда на строительстве каналов, дорог, мостов и других сооружений.
Классификация экскаваторов
... эксплуатационных возможностей. Кроме того, определение размера (класса) одноковшового экскаватора только по емкости одного из применяемых на этой машине ковшей неопределенно и приводит к неправильному представлению о возможностях ... От выпадания зубья удерживаются в гнездах шплинтами. Прямые лопаты в последние годы оснащают ковшами с полукруглой передней стенкой и с козырьком в виде совка без ...
Так, в конце 20-х годов 19 века в Петербурге появился ржевский мещанин Немилов. Он уже построил немало мельниц, плотин и мостов, применяя при этом хитроумные машины собственной конструкции и изготовления. Вот и теперь он сдал на заключение генералу Бетанкуру чертежи: “Машины для уравнения земли у подошвы реки”, “Машины для выстилки плитою из гранитного камня подошвы между столбов” и “Копра особого устроения, каковые еще нигде не виданы”. Трижды пришлось Немилову продлить в столице свой паспорт, ответа он так и не дождался и вернулся на родину ни с чем. А ведь эти проекты, если б были одобрены и приняты, могли сыграть заметную роль в развитии строительных машин. В те же годы в Петербурге на чердаке одного из домов Гороховой улицы у Каменного моста жил “страстный механик” Казаманов. Не имея ни средств, ни материалов, ни инструментов, он умудрялся все же сооружать модели своих изобретений, среди которых были и своеобразный копер для вбивания свай, и машина “для подъема тяжестей с большею легкостью и удобностью на возвышенность”. Технические новинки, созданные этими и другими безвестными изобретателями-самоучками, не нашли ни должного понимания, ни должного распространения. Может быть, чуть больше повезло русским землечерпалкам.
Первая плавучая землечерпалка была создана в Петербургском институте путей сообщения в 1809 году. Ее мощность составляла 15 лошадиных сил. Такое устройство могло заменить труд многих людей. Предназначалась эта машина для очистки водоемов. В 1811-1812 годах землечерпалку построили на Ижорском заводе. Начиная, с 1813 и по 1819 год машина работала на очистке Кронштадтского порта. Позднее в России и за границей были предложены усовершенствованные конструкции землечерпалок. Но это был, пожалуй, один из первых многоковшовых экскаваторов. В 1847 году русский изобретатель Кушелевский сделал еще один шаг в этой области. Он предложил идею землечерпательной машины, которая могла работать как на воде, так и на суше. Эта машина соединяла в себе достоинства речной землечерпалки и сухопутного экскаватора. В 1854 году в Петербурге были изданы материалы, подготовленные комиссией, изучавшей природные богатства и хозяйство Пермской губернии. В них опубликованы интересные сведения о первом русском паровом экскаваторе, который авторы документа и назвали “земляным механизмом”. Кем он был построен, членам комиссии не удалось установить. Было известно только, что был этот неизвестный механик родом из Нижнего Тагила, но описанная машина выполняла, по существу, то, что делает экскаватор: она могла перемещаться и “посредством особых устройств”, говорилось в описании машины, копала руду и производила ее уборку от забоя, подготавливая фронт работ для дальнейшей выемки руды.
Так, почти 130 лет назад в России в руднике горы Высокой на Урале был применен способ открытой разработки полезных ископаемых с помощью экскаватора. Производство одноковшовых экскаваторов в России было начато в 1901 на Путиловском (ныне Тверской экскаваторный) заводе. В СССР производство экскаваторов было организовано в 1931. Выпущены первые 15 машин. С 1947 Уральский завод тяжёлого машиностроения (УЗТМ) впервые в мире организовал серийный выпуск карьерных экскаваторов с ковшами ёмкостью 3-5 м3. В 1958 на УЗТМ был изготовлен шагающий экскаватор-драглайн с ковшом 25 м3 и стрелой 100 м, а на Новокраматорском машиностроительном заводе (НКМЗ) в 1965 — экскаватор-лопата с ковшом 35 м3 для крепких грунтов. В 1975 УЗТМ закончил изготовление шагающего драглайна с ковшом ёмкостью 100 м3 и стрелой 100 м. УЗТМ осваивает наиболее мощную карьерную лопату, с ковшом 20 м3, для крепких грунтов (1976).
Одноковшовые экскаваторы. Башенные краны. Погрузочно-разгрузочные машины
... грунтов с крупными твёрдыми включениями. Для работы в более мягких грунтах одноковшовые экскаваторы могут снабжаться ковшами увеличенной ёмкости. Скальные породы и мёрзлые ... Таким образом, рабочее время машины, в течение которого выбирают грунт, и производительность многоковшовых экскаваторов выше, чем одноковшовых. Несмотря на это, одноковшовые экскаваторы распространены шире вследствие ...
Активное строительство железных дорог в США в тридцатых годах девятнадцатого века и нехватка при этом строительных рабочих привели к созданию в 1832-1836гг американцем Отисом первого парового одноковшового экскаватора.
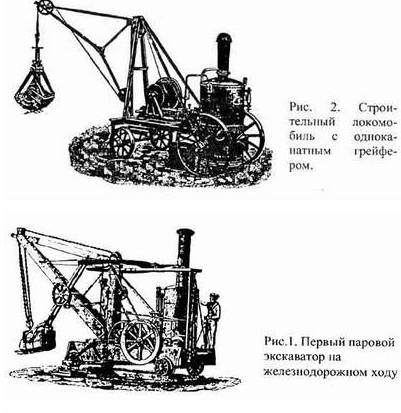
Экскаватор был неполноповоротным, имел железнодорожную ходовую часть, был оснащен ковшом 1,14 куб.м, паровым двигателем мощностью 15 л.с., обеспечивал среднюю производительность 45-50 куб.м/час и заменял примерно 50 рабочих. Уже через несколько лет экскаваторы Отиса заменяли 180 рабочих. Первоначально экскаваторы использовались преимущественно на строительстве железных дорог. Один из первых экскаваторов был продан в Англию в 1842 г, а в 1843 г четыре из семи построенных Отисом экскаваторов были проданы в Россию для использования при строительстве Николаевской железной дороги. Однако строительные подрядчики не восприняли эти машины и в 1848 г продали на Урал. В Нижнем Тагиле экскаваторы, впервые в мировой практике, были использованы на вскрышных работах при добыче руды.
Во второй половине девятнадцатого века масштабное строительство железных дорог и каналов потребовало перемещения все больших масс земли, которое уже не могло быть осуществлено с помощью ручного труда землекопов. Это привело к активному развитию разнообразных землеройных машин.
В Германии применялись «строительные локомобили», оснащенные одноканатными грейферами.
До конца века основные объемы земляных работ на строительстве железных дорог в России выполнялись вручную (лопаты, тачки, грабарки), поскольку дешевая рабочая сила существовала в избытке. Когда при строительстве западносибирского участка Транссибирской магистрали возникли затруднения с рабочей силой, были закуплены в Америке «землекопные машины»
В такие машины впрягались 12-16 лошадей. Для выемки и перемещения грунта использовались, также, конные волокуши с металлическим ковшом, которые назывались «скреппелами» или «землеройками».
Первый русский одноковшовый неполноповоротный железнодорожный экскаватор со сменным ковшом (2,3 куб.м. для легких грузов и 1,5 куб.м. для тяжелых грузов) был построен на Путиловском заводе в 1902 году. Производительность его была 100-290 куб.м./час, вес 65-75 т. До 1917 года было построено 35 таких машин. В начале XX века экскаваторы использовались в России довольно интенсивно. Например, при возведении сухого дока в Кронштадте в 1909-1910 годах работы велись в две смены по 10 часов каждая. Машины этого типа изготавливались до 30-х годов XX века.
В отдельных случаях применялись плавучие экскаваторы. Плавучие экскаваторы выполнялись, как правило, неполноповоротными с прямой лопатой.
Во второй половине XIX — начале XX веков началось строительство гигантских каналов, при котором требовалось перемещать огромные массы грунта.
Суэцкий канал (длина 160 км, начало строительства — 1859 г) сооружался около 10 лет (в основном, вручную).
Электропривод механизма подъема ковша экскаватора ЭШ
... расчет системы автоматического управления электропривода подъема ковша экскаватора ЭШ 100.100 функциональная схемы которого приведена на рис. 1.1. Рис. 1.1 Функциональная схема электропривода подъема ковша экскаватора ЭШ 100.100 Электрический ... тм2 с груженным ковшом с порожним ковшом Jгр Jп 5409600 4700000 11. Диаметр каната, м dк 0,09 12. Передаточное отношение механизмов подъема тяги поворота ...
Общая численность рабочих, занятых на постройке, достигала 40 тысяч человек. За время строительства было перемещено примерно 75 млн. кубометров грунта.
При сооружении Панамского канала (1880-1913гг) было перемещено 160 млн. кубометров грунта. На втором этапе строительства (1903-1913гг) применялись более ста одноковшовых (преимущественно железнодорожных) и около 20-ти многоковшовых экскаваторов.
После первой Мировой войны, одновременно с общим развитием техники, активизировалось и развитие экскаваторов. Двигатели внутреннего сгорания и электропривод, применение гусеничного (и шагающего) хода позволили существенно увеличить мощности и мобильность экскаваторов. Экскаваторы стали полноповоротными, увеличилась номенклатура их рабочего оборудования (прямая и обратная лопата, драгляйн, струг и пр.) и сфера их применения (вскрышные, тоннельные работы и пр.).
В США и в России совершенствовались одноковшовые экскаваторы. В Германии начали строить все более мощные многоковшовые экскаваторы. Появились многочисленные специальные машины (канавокопатели и др.).
Уже в начале 50-х годов XX века использовались гигантские экскаваторы с ковшами объемом до 30 куб.м. (ЭГЛ-15 Ново-Краматорского завода, американские экскаваторы Марион, Бюсайрус и др.).
Во второй половине XX века традиционные типы экскаваторов совершенствовались в основном за счет применения новых машиностроительных технологий и оборудования (гидропривод и пр.).
Ручной труд на земляных работах сохранился только в тех случаях, когда имеется избыток бесплатной рабочей силы либо при малом объеме и стесненных условиях работ, не позволяющих применить необходимую землеройную технику.
2. Основная часть, .1 Определение
ЭКСКАВАТОР выемочно-погрузочная машина цикличного действия для земляных работ и добычи полезных ископаемых. Экскаваторы применялись еще в Древнем Египте и Древнем Риме как средство механизации работ по углублению русел рек и каналов. В зависимости от организации процесса черпания они делятся на ряд типов: механическая лопата (прямая и обратная), драглайн, многоковшовый, роторный, грейферный и т.д. Первая паровая механическая лопата была запатентована в 1836. В настоящее время большинство экскаваторов имеет электрический или дизельный приводы. Механическая лопата. Усилие черпания прямой механической лопаты складывается из направленной вверх силы тяги, прилагаемой к ковшу подъемной цепью или подъемным проволочным канатом, и осевого усилия напора, прилагаемого к рукояти, на которой закреплен ковш. По своему назначению (и вместимости ковша) механические лопаты подразделяются на универсальные (0,2-2 м3), карьерные и добычные (2-5 м3) и вскрышные (8-90 м3).
Все эти экскаваторы выполняются на гусеничном ходу. На основании устанавливается поворотная платформа, несущая стрелу. Нижний конец стрелы опирается (через шарниры) на эту платформу, а верхний удерживается в рабочем положении канатным подвесом, опорой которого служат треугольные рамы, тоже закрепленные на платформе. Стрела может быть рассчитана на работу с ковшом прямой или обратной лопаты, ковшом драглайна, грейферным ковшом или работу с грузоподъемным крюком. Универсальный одноковшовый экскаватор. Экскаватор такого типа легко перестраивается на любой вид работ путем замены переднего рабочего оборудования. Все основные параметры таких экскаваторов (вылет стрелы, размеры гусеничных опор, габариты, мощность привода, линейные скорости, вместимость ковша, грузоподъемность, вид двигателя) стандартизованы. Как правило, они выпускаются с бензиновыми или дизельными двигателями, но может быть предусмотрен и электропривод. Карьерные и добычные одноковшовые экскаваторы. Такие машины рассчитаны на самые тяжелые условия эксплуатации. Они проектируются как механические лопаты, допускающие переоборудование в драглайн. Поскольку они предназначаются для карьеров, шахт, крупных строительств, где имеется подвод электроэнергии, их, оборудуют системой электропривода, основанной на управлении по напряжению всеми или некоторыми функциями — черпанием, поворотом стрелы, напором и перемещением. Основой такой системы служит двигатель-генераторный агрегат, в котором электродвигатель переменного тока механически связан с отдельными электрогенераторами, питающими приводы разных групп оборудования. Частоты вращения и вращающие моменты приводов регулируются изменением тока возбуждения электрогенераторов и электродвигателей. Вскрышные механические лопаты. Для таких экскаваторов характерны большие радиусы черпания и разгрузки (более 100 м) и большая вместимость ковша (90 м3 и более).
Многоковшовые экскаваторы
... навесного оборудования (грейферы‚ погрузочные ковши‚ гидромолоты‚ гидроножницы и др.) экскаватор становится машиной универсальной. Различают одноковшовые (механическая лопата, драглайн и др.) и многоковшовые (цепные и роторные) экскаваторы. Кроме того экскаваторы классифицируются ...
От малых универсальных и карьерных экскаваторов, перемещающихся на двух жестко закрепленных гусеничных тележках, они отличаются конструкцией гусеничного хода. Каждый из четырех углов их основания опирается на двухленточную гусеничную тележку. Горизонтальность основания автоматически поддерживается гидравлическими домкратами, цилиндры которых закреплены на основании экскаватора, а поршни — на гусеничных тележках. Шире других используются существуют два варианта конструкции переднего оборудования. В одном из них основными узлами являются одноканатная двухбарабанная лебедка, рукоять круглого сечения и канатный напорный механизм, закрепленный на поворотной платформе. Подъемный механизм сбалансирован, так что при опускании ковша поднимается противовес, а опусканием противовеса облегчается поднятие ковша при срезании грунта. В другом варианте используется трехканатная лебедка без противовеса. Стреле, рукояти и напорному механизму придается особая конструкция с промежуточным шарниром, обеспечивающая независимость подвеса. Напорный механизм, закрепленный на треугольной или портальной ферме, воздействует на двухзвенную рукоять, которая поддерживается и направляется подвижным жестким звеном. Драглайн. В отличие от прямой механической лопаты, которая разрабатывает забой, расположенный выше горизонта установки самого экскаватора, экскаватор-драглайн (как и обратная лопата) разрабатывает грунт ниже уровня стояния машины. Его ковш подвешен на подъемном канате, а черпание осуществляется подтягиванием «на себя» вторым, тяговым канатом. Ковш врезается в грунт под тяжестью собственного веса. Такое устройство позволяет разрабатывать даже крепкую скальную породу, разрыхленную взрывом. Благодаря своим большим рабочим размерам (глубине черпания, радиусу и высоте разгрузки) драглайн особенно подходит для строительства каналов и дамб, подводного черпания, разработки россыпных месторождений и месторождений требующих раздельной выемки покрывающей породы и промышленной руды. Производительность драглайна зависит от глубины черпания и высоты подъема, а также от рабочего угла поворота стрелы. Экскаватор с вместимостью ковша 20 м3 снимал покрывающую породу с угольного пласта с производительностью ок. 640 000 м3 в месяц (720 рабочих часов).
Рабочее оборудование одноковшового экскаватора
... ковша — выполняется поворотом рукояти относительно стрелы. Положение ковша относительно рукояти и стрелы относительно машины остается неизменным. Поворот платформы — по окончании загрузки ковша выполняется поворот платформы с рабочим оборудованием экскаватора. Ковш ... движение стрелы, рукояти и ковша. В качестве планировщика откосов нашли применение экскаваторы с телескопической стрелой. 1.5. Струг ...
В ходе 14-дневных испытаний драглайн с вместимостью ковша 9 м3, разгружавший материал в хоппер, показал производительность погрузки, равную 400 м3 за 1 ч. Основание драглайна служит для закрепления поворотной платформы. На платформе установлены стрела и барабаны лебедок для подъемного и тягового канатов. Барабаны через муфты и зубчатые передачи связаны с отдельными дизелями или электродвигателями. Подъемный канат огибает шкив на конце стрелы, а тяговый пропассован через направляющее устройство у основания стрелы. Для опускания ковша и стравливания подъемного каната машинист выключает сцепление барабанов, и ковш опускается под собственным весом. Скорость опускания регулируется тормозами. Для поворота стрелы даже на дизельных экскаваторах предусматривается система управления с двигатель-генераторным агрегатом. На экскаваторах же с электроприводом такая система управления применяется для всех функций. Большие драглайны выпускаются на шагающем ходу, который состоит из центральной опорной плиты, боковых лыж и кулачкового или рычажного механизма, приводящего их в движение. Когда экскаватор опирается на плиту, лыжи приподняты и могут перемещаться. После их опускания экскаватор вместе с центральной плитой приподнимается, опирается на лыжи и перемещается. Шаг перемещения составляет ок. 2 м. Поскольку лыжи закреплены на поворотной платформе, ее поворотом можно изменить направление перемещения, так что машина может перемещаться даже в боковом направлении. Благодаря высокой маневренности и проходимости шаговый ход вытесняет гусеничные и другие ходовые устройства. Башенный драглайн (канатно-скреперная установка).
Это экскаватор-драглайн, стрела которого заменена натянутым между двумя башнями канатом, несущим ковш. Такой драглайн может иметь эффективный «вылет стрелы» (расстояние между башнями) до 500 м. Применяются башенные драглайны двух типов: с волочением ковша по земле от точки черпания до точки разгрузки и с перемещением его над землей. Башни могут быть установлены на гусеничном ходу. По натяжному канату ходит кабельная тележка, к которой прикреплен ковш. Когда натяжному канату дается слабина, ковш под собственным весом движется от высокой башни к низкой. На больших пролетах ковш снабжается хвостовым канатом. При приспущенном натяжном канате посредством тягового каната осуществляется черпание. По заполнении ковша натяжной канат натягивается, и ковш приподнимается для перемещения по поверхности земли. Когда ковш приходит в зону разгрузки, натяжной канат натягивают так, чтобы можно было поднять ковш на нужную высоту. Ковш разгружается через дно, для чего ему часто придают серповидную форму. Такие драглайны применяются преимущественно на строительстве дамб обвалования. Канатно-скреперные установки второго типа широко используются на заводах по производству щебня и гравия; ковш в них обычно без открывающегося дна, и управление разгрузкой осуществляется посредством тягового каната.
2.2 Модификации
Экскаватор ЭКГ-10 предназначен для разработки и погрузки в транспортные средства полезных ископаемых до V категории включительно. Малоопорное гусеничное ходовое устройство позволяет передвигаться на уклонах до 12 градусов.
Технические характеристики шагающих экскаваторов
... конструктивных узлов экскаватора, связанных с ковшами или определяющих траекторию их движения при копании. Так, к рабочему оборудованию прямой лопаты относятся ковш, рукоять и стрела. У экскаваторов с коленчато- ... труба; 8 -- выступы; 9 --- захват. Опорная база шагающего экскаватора ЭШ-14/75 (фиг. 125) является типичной для всех шагающих экскаваторов. Она состоит из опорной рамы, на которой крепятся ...
Экскаватор ЭКГ-10 является базовой моделью. Для использования экскаватора ЭКГ-10 в различных технологических схемах на его базе разработаны следующие модификации:
ЭКГ-10М с уширенным ковшом вместимостью 11,5 м3 и лучшей заполняемостью ковша при использовании на угольных разрезах. Основной ковш предназначен для пород с объемом весом в целом не более 2,7 т/м3 (по специальному заказу).
ЭКГ-10Р с ковшом 8 м3. Экскаватор ЭКГ-10Р имеет увеличенное подъемное усилие до 110 т вместо 100 т и рядную подъемную лебедку с увеличенным межцентровым расстоянием редуктора. На поворотной платформе предусмотрены платики и отверстия для крепления как рядного, так и планетарного редуктора подъема.
Экскаватор ЭКГ-10 с объемом ковша 10 м3 имеет конструкцию, схожую с моделью ЭКГ-8, но некоторые элементы рабочих органов модернизированы, а именно:
- оптимизированы углы резания и геометрия ковша, что обеспечивает улучшенную внедряемость в породу и полную наполняемость ковша;
- применено более надежное фланцевое крепление ковша к рукояти;
- цилиндрические редуктора заменены более надежными и компактными планетарными;
- вкладыши на седловом подшипнике заменены на регулируемые ролики, что снижает динамические нагрузки;
- рукоять снабжена демпфером в целях снижения внутренних напряжений;
- для намотки кабеля предусмотрен барабан с электродвигателем.
В целом модель данного экскаватора отличается высокой надежностью и увеличением производительности, благодаря сокращению цикла погрузки и снижения энергоемкости работ. (Рис.4)
2.3 Электрооборудование экскаватора ЭКГ 10
Экскаватор ЭКГ 10 (и его модификации) оборудован современной электронной системой управления на основе тиристорных преобразователей, обеспечивающих независимое бесступенчатое регулирование главных приводов и формирование оптимальных статических и динамических характеристик по схеме «генератор-двигатель».
Система управления снабжена необходимыми блокировками для обеспечения надежной и безопасной работы экскаватора. Блочное исполнение преобразователей облегчает обнаружение неисправностей и их ремонт.
4 Назначение и мощность экскаватора
Экскаваторы разделяют на несколько групп по назначению и мощности. Если машина производит все операции в определенном порядке, повторяя их через некоторые промежутки времени, она относится к машинам прерывного (цикличного) действия, если производит все операции одновременно, — машиной непрерывного действия. К экскаваторам прерывного действия относятся одноковшовые, а к экскаваторам непрерывного действия — многоковшовые, скребковые и фрезерные. Одноковшовые и многоковшовые экскаваторы бывают сухопутные и плавучие. Сухопутные экскаваторы имеют гусеничное, пневмоколесное, рельсовое и шагающее ходовое устройство. Все механизмы экскаватора приводятся в движение дизелями, карбюраторными, паровыми или электрическими двигателями. Наиболее экономичными являются дизельные и электрические двигатели. Выбор двигателя определяется условиями, в которых будет работать экскаватор. Так, на экскаваторах, работающих в карьере, выгодно применять электродвигатели, так как электричество — наиболее дешевый вид энергии, а при работе на строительстве дорог, где машину часто перевозят с места на место, целесообразно использовать дизельные двигатели. Если все механизмы экскаватора приводятся в движение от одного двигателя, такой привод называют одномоторным. Если в экскаваторе каждый механизм (или группа механизмов) приводится в движение отдельным двигателем, такой привод называется многомоторным. С целью передачи движения от двигателя к рабочим механизмам используют следующие виды приводов:
Технология и оборудование сварочных работ
... подъемному крану или другому грузоподъемному оборудованию и поднимается на высоту ... дни считается кислородно-конвертерный способ производства стали. В то же ... связи с этим приходится в сварочную проволоку вводить раскислители (такие, ... сталь, выдержанная некоторое время в ковшах вместе с раскислителями (кремний, марганец, ... число марок сталей, различающихся по структуре, химическому составу, механическим ...
- механический, когда движение передается с помощью валов, шестерен, червячных пар, цепных передач;
- гидравлический объемный, где роль привода выполняют гидронасос, маслопроводы и гидромоторы (или гидроцилиндры);
- в маслопроводах циркулирует жидкость, передающая энергию от насосов к гидромоторам (или гидроцилиндрам), приводящим рабочие механизмы в движение;
- гидромеханический, в котором для передачи энергии используют гидротрансформатор в сочетании с механической трансмиссией;
- электрический, применяемый на экскаваторах с многомоторным приводом в сочетании с механическим;
- смешанный, состоящий из приводов двух видов, например механического и электрического.
Таким образом, экскаваторы классифицируют:
- по способу перемещения (плавучие и сухопутные);
- по типу силового оборудования (с дизелем, карбюраторным, электрическим, дизель-электрическим и т.д.);
- по числу двигателей (одномоторные, многомоторные);
- по виду привода (механические, гидравлические, гидромеханические, электрические);
- по типу ходового устройства сухопутных экскаваторов (гусеничные, пневмоколесные, рельсовые и с шагающим ходовым оборудованием).
Каждая из групп экскаваторов отличается более мелкими признаками — размерами, мощностью, назначением.
Одноковшовые экскаваторы классифицируют по назначению.
Существуют три основные группы:
- строительно-универсальные — с ковшами емкостью до 3 м3, предназначенные для производства земляных работ;
- карьерные — с ковшами емкостью от 2 до 8 м3, предназначенные для работы в карьерах на разработке рудных и угольных месторождений;
- вскрышные — с ковшами емкостью более 6 м3, предназначенные для разработки верхних слоев пород (вскрыши).
Одноковшовые экскаваторы различают по использованию их с различными видами рабочего оборудования. Универсальные экскаваторы предназначены для работы с различными видами сменного оборудования; прямой и обратной лопатой, драглайном, крановой стрелой с крюковой подвеской или грейфером, копром для забивки свай и т.д. Полууниверсальные экскаваторы кроме основного рабочего оборудования имеют один или два вида дополнительного сменного оборудования (прямую лопату, обратную лопату, драглайн).
Специальные мощные экскаваторы имеют лишь один вид оборудования, например прямую лопату. Одноковшовые экскаваторы. Одноковшовым универсальным экскаватором называется машина цикличного действия, предназначенная для выемки и перемещения грунтов и иных материалов с помощью одного из видов рабочего оборудования с одним ковшом, и для выполнения погрузочных сваебойных и прочих работ другими видами сменного рабочего оборудования. Одноковшовые экскаваторы (рис. 5) состоят из следующих основных узлов: ходового устройства, поворотной платформы с силовым оборудованием и основными кинематическими звеньями и рабочего оборудования. Гусеничное ходовое оборудование обеспечивает высокую проходимость и хорошую устойчивость при работе экскаватора. В последние годы значительно возрос выпуск экскаваторов с небольшой емкостью ковша на пневмоколесном ходу, обладающих большой подвижностью и маневренностью при перемещении машины с одного объекта на другой. При работе на слабых грунтах применяют уширенное (или удлиненное) гусеничное оборудование, наличие которого уменьшает удельное давление на грунт и улучшает проходимость экскаватора.
2.5 Габаритные размеры экскаватора
Поворотная платформа опирается через катки или специальное (шариковое или роликовое) опорно-поворотное устройство на раму ходового устройства. Платформа поворачивается в горизонтальной плоскости относительно ходовой части. Угол поворота ходового оборудования в горизонтальной плоскости определяет возможность экскаватора быть полноповоротным или неполноповоротным. Поворотная часть полноповоротного экскаватора может вращаться вокруг своей оси на 360°.У этих машин на поворотной платформе смонтированы все силовые агрегаты, пульт управления, рабочие механизмы и крепится рабочее оборудование. Рабочее оборудование включает комплекс узлов экскаватора с рабочим органом (ковш, крюк, грейфер и др.).
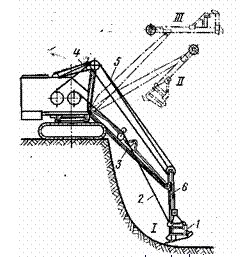
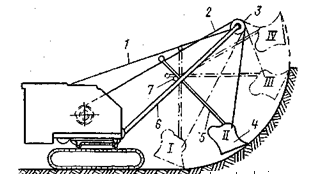
Грунт разрабатывают ковшом, после чего перемещают к месту разгрузки в отвал или в транспортное средство. В зависимости от вида сменного оборудования применяют жесткую или гибкую подвеску рабочего органа. Характер работы определяет рабочее оборудование: прямую лопату, обратную лопату, драглайн, кран или грейфер. Рабочий цикл экскаватора выполняется в следующей последовательности: копание грунта; перемещение заполненного грунтом ковша к месту разгрузки; разгрузка грунта из ковша в отвал или транспортирующее устройство; перемещение ковша (поворот платформы) к забою; опускание ковша для подготовки к следующей операции копания. Система индексации одноковшовых универсальных экскаваторов. Системой индексации машин называется принцип, который заложен в структуру индекса (марки), обозначающего тот или иной экскаватор и отражающего его основную характеристику. В 1968 г. в нашей стране введена новая система индексации одноковшовых универсальных экскаваторов. Индекс экскаватора имеет четыре основные цифры, соответственно обозначающие: размерную группу машины, тип ходового устройства, конструктивное исполнение рабочего оборудования и порядковый номер модели данного типа. Таким образом, индекс экскаватора содержит сведения об его основной характеристике. Так, ЭО-3313 БТВ — экскаватор одноковшовый универсальный, 3-й размерной группы, на пневмоколесном ходовом устройстве, с канатной подвеской рабочего оборудования, 3-я модель, прошедшая вторую модернизацию, в исполнении для работы во влажных тропиках. Прямая лопата — оборудование, предназначенное для разработки грунта выше уровня стоянки экскаватора. Прямая лопата с механическим приводом состоит из следующих основных узлов: каната подъема стрелы, ковша, рукояти, стрелы, седлового подшипника. Рукоять к стрелке крепится седловым подшипником, с помощью которого рукоять поворачивается в вертикальной плоскости относительно стрелы и совершает возвратно-поступательное движение вдоль оси рукоятки. Ковш поднимается подъемным канатом, огибающим головные блоки. Напор рукоятки осуществляется напорным механизмом, которым выполняется также обратное движение (возврат) рукояти. На универсальных строительных экскаваторах применяют канатные и зубчато-реечные (напорные механизмы).
Напорные механизмы делятся на независимые, зависимые, комбинированные — Напорный механизм называется независимым, если усилие напора может быть увеличено или уменьшено независимо от величины усилия в подъемном тросе ковша, т.е. когда напорное движение рукояти с ковшом производится независимо от подъема ковша. Если величина усилия напора зависит от величины усилия в подъемном тросе ковша и имеется возможность только уменьшить напор, такой напорный механизм называется зависимым. Напорный механизм называется комбинированным, когда величина усилия напора зависит от усилия в подъемном тросе, но при включении независимой части напорного механизма может быть по желанию увеличена. Ковш прямой лопаты состоит из корпуса, откидного днища с засовом и сменных зубьев. Зубья имеют сужающийся к концу хвостовик, входящий в гнездо козырька. От выпадения зубья удерживаются в гнездах шплинтами. Прямые лопаты в последние годы оснащают ковшами с полукруглой передней стенкой и с козырьком в виде совка без зубьев. Ковш такой конструкции значительно легче и имеет минимальное сопротивление при копании грунта, что, естественно, повышает производительность экскаватора. На экскаваторах с прямой лопатой применяют рукояти двух типов: однобалочные (внутреннего типа) и двухбалочные (внешнего типа).
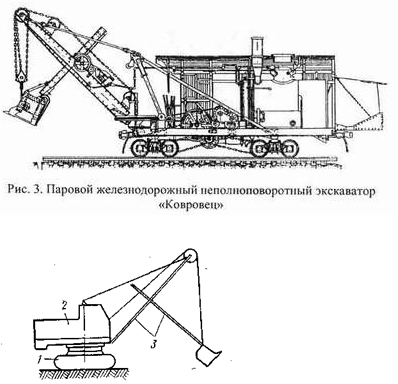
Однобалочная рукоять проходит внутри стрелы, а двухбалочная — снаружи. Рукоять может совершать возвратно-поступательное движение в направляющих седловины напорного вала, а также поворачиваться вместе с седловым подшипником в вертикальной плоскости относительно напорного вала. Конструкция рукояти определяет конструкцию напорного механизма. В экскаваторах, выпускаемых в СССР, при однобалочной рукояти применяют канатный напорный механизм, а при двухбалочной — кремальерный напорный механизм. Стрела прямой лопаты выполнена в виде сварной конструкции из листовой стали. Тип рукояти определяет конструкцию стрелы. Стрела бывает двухбалочной при однобалочной рукояти и однобалочной при двухбалочной рукояти. В верхней части стрелы смонтированы на подшипниках блоки, через которые проходит канат подъема ковша и стрелоподъемный канат. Нижним концом (пятой) стрела пальцами крепится к поворотной платформе и может поворачиваться при изменении ее угла наклона. В средней части стрелы расположен напорный вал. Обратная лопата — это оборудование, предназначенное для разработки грунтов ниже уровня стоянки экскаватора при рытье котлованов, траншей, выемок. Обратная лопата (рис 75) состоит из ковша, стрелы, рукояти и двуногой стойки. Ковш закреплен жестко к рукояти, шарнирно присоединенной к верхнему концу стрелы. При подтягивании каната рукоять поворачивается против часовой стрелки, ковш врезается в грунт (положение /; положения // и /// соответствуют транспортному положению и выгрузке грунта из ковша).
Процесс экскавации грунта ковшом. Общее сопротивление экскавации R0 преодолевается активным усилием W0, направленным касательно к траектории ковша, которое может быть разложено на усилие резания и сдвига грунта WVi направленное по касательной к режущей грани ковша, и на усилие выталкивания WB, направленное нормально к режущей грани ковша. Основными параметрами гидравлических одноковшовых экскаваторов являются: емкость ковша q, масса экскаватора С, мощность двигателя N, рабочие размеры экскаватора, а также давление и производительность насосов. В гидроприводах экскаваторов применяются насосы постоянной производительности шестеренного и лопастного типа (с давлением 12-16МПа) и поршневые с давлением до 30 МПь а также насосы переменной производительности, преимуществ вено аксиально-поршневые. Насосы с постоянной производительностью просты по ycтройству, но не обеспечивают полного использования мощности двигателя на всех режимах. Насосы переменной производительности обеспечивают более рациональный и устойчивый режим работы экскаваторов.
Производительность и технологические схемы работы одноковшовых экскаваторов. Производительность одноковшовых экскаваторов определяется многими факторами: конструкцией машины, уровнем организации производства земляных работ, состоянием и качеством грунта и забоя, квалификацией машиниста и техническим состоянием машины. На рис. 77, б представлена схема работы драглайна при строительстве насыпи земляного полотна из резерва. Экскавация грунта ведется на двух захватках; на одной из них отсыпается очередной слой грунта и разравнивается бульдозером, а на Другой — свежий отсыпанный грунт уплотняется грунтоуплотняющими машинами. Многоковшовые экскаваторы. Многоковшовые экскаваторы представляют собой землеройные машины, имеющие в качестве рабочего органа многоковшовую цепь или роторное колесо с ковшами, жестко закрепленными по периметру. Они применяются: на дорожно-строительных работах; при рытье котлованов, каналов и траншей для укладки труб или для оснований установка, пульт управления, коробка передач, рабочий орган устанавливают на ходовую раму.
Общеизвестно, что основные конструктивные параметры экскаватора это геометрическая вместимость ковша, масса рабочего оборудования и его компоновка, передаточное соотношение редукторов рабочих механизмов (выбор рациональной частоты вращения электродвигателей этих механизмов).
Из общего числа факторов, определяющих функционирование комплексной системы «машинист-экскватор-забой» активно могут быть изменены конструктивные, наладочные параметры и управляющие воздействия. В связи с этим, на стадии проектирования должны быть заложены конкретные технические решения, позволяющие повысить эффективность функционирования всей комплексной системы, а на стадии эксплуатации поддерживать оптимальные технические параметры и алгоритмы управления.
Одним из важнейших конструктивных факторов, определяющих первоначальные затраты, величину эксплуатационных расходов (энергия, ремонт оборудования, простои, связанные с ремонтом), удельную металлоемкость, а также компоновку оборудования на поворотной платформе, является выбор рационального передаточного числа редуктора номинальной частоты вращения приводных двигателей главных механизмов подъема, напора (тяги) поворота [1, 2].
Применяемые в настоящее время на многих карьерных экскаваторах высокооборотные электродвигатели (с передаточным отношением редуктора i = 31-40 и более) обеспечивают меньшую их массу (и габариты), рациональную компоновку на поворотной платформе, при необходимых суммарных моментах нагрузки на рабочее оборудование, но при этом значительно увеличивающих крайне нежелательные динамические нагрузки на рабочее оборудование и металлоконструкции экскаватора.
Коэффициент динамики (динамичности) в основном зависит от двух составляющих первой, зависящей от динамических параметров механической системы, и второй, зависящей от величины электромагнитного момента электродвигателя. Момент инерции (GD2) ротора электромотора является очень важным динамическим параметром электрической системы и он всегда приводится в технических характеристиках электромотора.
Как показывает опыт проектирования, анализ и исследования работы одноковшовых экскаваторов [1], одной из важных причин снижения надежности и долговечности работы деталей, узлов и экскаватора в целом является недооценка (при проектировании) влияния значительной и не управляемой кинетической энергии движущихся элементов «силовой цепи» электропривода, определяемой зависимостью
![]()
где ∑J суммарный момент инерции электродвигателя, приведенный к моторному валу механизма; ω угловая скорость вращения моторного вала.
Из этой зависимости следует, что снижение максимальных усилий, возникающих в механизме, может быть достигнуто за счет снижения суммарного момента инерции электродвигателей механизма, приведенного к моторному валу и квадрата их угловой скорости вращения.
Поскольку запас суммарной кинетической энергии в основном определяется суммарным моментом инерции якоря электродвигателя и приведенного к моторному валу редуктора, а также их угловой скоростью, то существенное снижение максимальных нагрузок на механизмы может быть достигнуто применением «среднеоборотных двигателей» не только с уменьшением угловой номинальной скорости электродвигателей, но при этом даже с увеличением их номинального момента.
Таким образом, с целью снижения динамических нагрузок, как на механическое, так и на электрооборудование главных механизмов, а также на металлоконструкции, особенно при черпании крупнокусковой скальной горной массы (и особенно, подготовленной БВР, даже при небольшой доли негабаритов [6]), в условиях низких температур и уменьшения удельного расхода электроэнергии, целесообразно на стадии проектирования рассматривать и решать вопрос о применении среднеоборотных электродвигателей с передаточными числами i редуктора механизма подъема или напора (мехлопат), тяги и подъема (драглайн), соответственно, iт≈30; iп≈18÷20.
Современные способы ручного и автоматического управления механизмами также позволяют несколько снижать максимальные динамические нагрузки [6, 7, 8].
Однако, наибольший эффект может быть достигнут при применении этих способов с использованием среднеоборотных двигателей.
Инерционность вращающихся элементов электродвигателей и приводимых ими механизмов взаимозависимы. Например, при двухступенчатом редукторе с передаточным числом i ?w 30, его приведенный к моторному валу момент инерции примерно равен моменту инерции электродвигателя [2].
При передаточном числе редуктора i >30, его момент инерции будет превышать момент инерции электродвигателя, а при i< 30 момент инерции (приведенный к моторному валу) будет меньше момента инерции электродвигателя. Это вытекает из принципа подобия, из которого следует [3], что масса редуктора, а, следовательно, и его вращающихся элементов, пропорциональна моменту выходного вала. Тогда для предварительных расчетов может быть использована приближенная взаимозависимость моментов инерции редуктора, приведенных к моторному валу
![]()
(от передаточного числа ip редуктора применительно к двухступенчатым редукторам мехлопат и драглайнов).
Так, при проектировании и изготовлении карьерной лопаты ЭКГ-20 (УЗТМ) были применены среднеоборотные двигатели для привода подъема (∑N=2
- 560 кВт, n = 500 об/мин с редуктором i = 33,7).
Вместе с тем, при создании Ижорским заводом экскаватора ЭКГ-15 были использованы для привода подъема электродвигатели высокооборотные (EN=2
- 500 кВт, n=900 об/мин с передаточным числом подъемной лебедки
∑i= iлебед.∑Iканатн.блоков=29.74
- 2=60).
Это обуславливает увеличение против приведенного к барабану экскаватора (даже ЭКГ-20), движущейся массы силовой цепи в 1.9 раза на экскаваторе ЭКГ-15, что существенно повышает коэффициент динамичности и ухудшает управляемость.
При создании на УЗТМ ЭШ-20.90 в их приводе поворота применяются средне оборотные двигатели (∑N=4
- 240 кВт;
- n=360 об/мин.), что позволило исключить возникающую при износе зубьев в венцах вибрацию в повороте, и снизить примерно в 1,5 раза инерционность поворота.
С той же целью на УЗТМ была выполнена модернизация электромеханизмов поворота драглайна ЭШ-15/90 с применением среднеоборотных электродвигателей (пн=460 об/мин и 4N=4
- 210 кВт).
При создании на НКМЗ вскрышной мехлопаты ЭВГ-35/65 (1956-57 гг.), для лебедок подъема и напора, были применены среднеоборотные электродвигатели, соответственно, 220-440 об/мин. и 300 об/мин. (для напора).
Это обеспечило снижение динамической составляющей подъема в 1.85 раза и напора в 2.2 раза; эти машины до сих пор успешно работают на Черемховском разрезе.
Исследованиями установлено [9], что основной причиной снижения надежности и долговечности таких машин являлась недооценка (при проектировании) влияния на это значительной кинетической энергии движущихся масс элементов «силовой цепи» (от электродвигателя и канатов до ковша) и, в основном, т.н. «живой силы А» электродвигателей и редукторов. Если существующими средствами машинист-оператор экскаватора может достаточно успешно управлять («дозировать») воздействием на рабочий процесс и нагружение электроэнергией на «силовую цепь», то это невозможно в отношении аккумулирования и использования кинетической ее энергии. Поэтому величина последней должна быть существенно ограничена в оптимальных пределах ее влияния как на рабочий процесс, так и на нагружение «силовой цепи» (электродвигатели-ковш).
Так, даже при отключении оператором воздействия электрической энергии значительная кинетическая энергия (накопленная номинальной угловой и линейной скоростями движения массы «силовой цепи») может привести к недопустимой аварийной величине нагружения и даже к разрушению последней.
Для иллюстрации рациональности ориентации на применение среднеоборотных электродвигателей в экскаваторной технике цикличного действия в таблице приводятся основные сопоставительные данные для расчета силовых и динамических величин по шести экскаваторам цикличного действия, наиболее широко применяемым в карьерах.
Из таблицы видно, что в ЭКГ-15, ЭШ-11/70, ЭШ-14/50 и ЭШ-15/90 применяются высокооборотные электродвигатели. Это обусловило значительные приведенные движущиеся массы электромеханических приводов и, как следствие, повышение динамической нагрузки в «силовой цепи» (электродвигатели-редуктор-ковш), а также снижение «отзывчивости» управляемости в рабочем процессе экскаваторов.
Полученные результаты расчетов величины приведенного веса к окружности барабана или ковшу, дают основание для
Столь огромный приведенный движущийся вес и величина кинетической энергии (как, например, 735 т у ЭКГ-15 и 653 т у ЭШ-15/90) будет эпизодически, т.е. при стопорении движения «силовой цепи» вызывать значительные, примерно в 1.5 раза большие, динамические усилия в ней (от электродвигателей до ковша), а также уменьшать «отзывчивость» в управлении, что непременно скажется в снижении надежности, а, следовательно, в производительности экскаваторов.
Применение среднеоборотных электродвигателей позволит существенно (в 2 раза и более) улучшить этот показатель.
Использование среднеоборотных электродвигателей было впервые реализовано специалистами УЗТМ только в выпущенной партии карьерных мехлопат ЭКГ-20 и в сравнительно маломощных электродвигателях ЭШ-20/90, четырехпоточных электроприводах поворота и при его модернизации у ЭШ-15/90.
К сожалению, это принципиально прогрессивное направление не встретило заинтересованности машиностроителей, так как оно неминуемо вызывало увеличение примерно на 50% удельной материалоемкости электродвигателей. А явную эффективность от применения среднеоборотных электродвигателей за счет снижения динамических нагрузок в «силовой цепи» экскаваторов; увеличения от этого надежности, долговечности, а, следовательно, снижения потерь фонда рабочего времени машины при ремонтных простоях и, наконец, увеличения «отзывчивости» в управлении с повышением от этого производительности, при некотором повышении расхода электроэнергии реально ощутят только потребители экскаваторов, но не изготовители электродвигателей.
Это противоречивое обстоятельство, видимо, не может быть разрешено без изменения принципа ценообразования на среднеоборотные электродвигатели. Понятно, что разрешение будет заключаться в повышении цены на них с учетом эффективности их применения в отраслях горнодобывающей промышленности, а не только величины затрат на производство среднеоборотных электродвигателей в электромашиностроении.
Заключение
Я хочу высказать свою мысль на счет двигателей для достижения обозначенной цели необходимо экскаваторы цикличного действия оснащать уже на заводе-изготовителе среднеоборотными электродвигателями. Они будут больше приносить прибыли и меньше будут потреблять энергию.
Литература
[Электронный ресурс]//URL: https://drprom.ru/kursovaya/ekskavator/
экскаватор погрузочная машина
1. www.google.ru
2. Анистратов Юрий Иванович Журнал «ГорнаяПромышленность» 2008-2010 ООО НПК «Гемос Лимитед».
Приложение 1, Техника безопасности
ПРЕЖДЕ ЧЕМ ПРИСТУПИТЬ К ЭКСПЛУАТАЦИИ ЭКСКАВАТОРА
В первую очередь думайте о безопасности. В особой ситуации носите защитную каску, защитные ботинки, защитные перчатки, защитные очки и устройства для защиты органов слуха в зависимости от конкретных условий работы.
Практически каждый несчастный случая является следствием несоблюдения элементарных правил техники безопасности. Перед началом работы убедитесь в том, что Вы действительно правильно поняли положения настоящего руководства. Надлежащий уход за экскаватором входит в круг ваших обязанностей. Прежде чем приступать к работе, полностью разберитесь в особенностях конструкции экскаватора и режимах его работы. Если Вы найдёте какую-либо опасную операцию в технологическом процессе, то посоветуйтесь с руководителем работ относительно превентивных мер безопасности ещё до начала работы на экскаваторе. Не приступайте к работе, если Вы чувствуете усталость, а также после принятия алкогольных напитков или каких-либо наркотических средств. Проводите ежедневный контрольный осмотр экскаватора в соответствии с Руководством по эксплуатации и обслуживанию.
Отремонтируйте повреждённые детали и затяните ослабевшие болты. Проверяйте наличие утечек моторного масла, рабочей жидкости.
Содержите экскаватор в чистоте, регулярно очищайте его от грязи и мойте её.
Не работайте на экскаваторе, если он требует ремонта.
Приступайте к работе после полного завершения ремонтных работ.
Подготовьтесь к случаю возгорания.
Храните огнетушитель в доступном месте, а номер телефона пожарной команды вблизи телефонного аппарата.
ЗАЩИТА ОТ ПАДАЮЩИХ И ЛЕТЯЩИХ ПРЕДМЕТОВ
Если существует опасность падения предметов, которые могут задеть оператора, установите соответствующие ограждения в зависимости от ситуации. Перед началом работ убедитесь, что ветровое стекло закрыто. Убедитесь, что внутри рабочей зоны, подверженной воздействию падающих или летающих объектов, нет никого из персонала за исключением оператора. В случае если необходимо использовать верхние защитные ограждения, передние защитные ограждения или средства ФОПС (средства защиты от падающих предметов).
НЕСАНКЦИОНИРОВАННЫЕ МОДИФИКАЦИИ
Любое изменение конструкции, произведённое без согласования, и одобрения фирмы может создать опасности.
Перед изменением конструкции проведите консультации с местным дистрибьютором фирмы. Фирма не несёт ответственности за несчастные случаи и повреждения экскаватора, возникшие в результате несогласованного изменения конструкции.
ПОДГОТОВКА К ЭКСТРЕННОЙ СИТУАЦИИ
Только в случае экстренной ситуации используйте молоток для того, чтобы разбить стекло кабины, после чего аккуратно покиньте кабину экскаватора.
Содержите огнетушитель и аптечку первой медицинской помощи в состоянии готовности к применению в случае пожара или несчастного случая.
Изучите порядок использования огнетушителя.
Имейте при себе номера телефонов контактных лиц, с которыми можно связаться в экстренных случаях.
ПРОБЛЕСКОВЫЙ МАЯЧОК
Когда Вы проводите работы на экскаваторе на самой дороге или ее обочине, то необходимо с целью предотвращения дорожных аварий установить на машину вращающийся проблесковый маячок. МЕРЫ ПРЕДОСТОРОЖНОСТИ ПРИ ЭКСПЛУАТАЦИИ РАБОЧЕГО ОБОРУДОВАНИЯ
При установке и эксплуатации дополнительного рабочего оборудования ознакомьтесь с инструкцией по его эксплуатации и соответствующими указаниями, приведенными в настоящей инструкции.
Не пользуйтесь съемным рабочим оборудованием, которое не одобрены фирмой или её местным дистрибьютором. Использование неразрешенного оборудования может затруднить обеспечение безопасности и отрицательно сказаться на производительности и сроке службы машины.
ПРАВИЛА ТЕХНИКИ БЕЗОПАСНОСТИ
К эксплуатации и техобслуживанию экскаватора допускается только квалифицированный и имеющий допуск персонал. При эксплуатации или техобслуживании экскаватора соблюдайте все правила техники безопасности, меры предосторожности и инструкции.
При совместной работе с другим оператором или лицом, отвечающим за организацию движения на рабочей площадке, убедитесь, что все понимают подаваемые рукой сигналы.
СРЕДСТВА ЗАЩИТЫ
Убедитесь в том, что все защитные ограждения, крышки и щитки установлены на отведенных для них местах. В случае повреждения отремонтируйте их.
Используйте должным образом такие средства защиты, как предохранительные замковые устройства и ремни безопасности. Никогда не снимайте какие-либо защитные приспособления.
Неправильное использование средств защиты может привести к тяжелым травмам и даже к смертельному исходу.
ВО ВРЕМЯ РАБОТЫ ЭКСКАВАТОРА
При залезании в экскаватор и вылезании из нее пользуйтесь поручнями и ступеньками. Никогда не запрыгивайте в экскаватор и не выпрыгивайте из него.
Перед началом работы на экскаваторе подайте звуковой сигнал для предупреждения находящегося поблизости персонала.
Перед началом работы на экскаваторе, с целью обеспечения хорошей видимости удалите все помехи, например, иней или лёд на стёклах.
Внимательно управляйте экскаватором, следите за тем, чтобы в пределах рабочей зоны не было людей и каких-либо препятствий.
При необходимости установите защитные ограждения.
При использовании рабочего оборудования следите за рабочей площадкой.
При работе экскаватора в замкнутом пространстве обеспечьте необходимую вентиляцию с целью предотвращения опасности отравления оператора выхлопными газами двигателя.
Проверьте расположение подземных коммуникаций (газопроводов и водопроводов) и обеспечьте их и свою безопасность перед выполнением работ.
Работа вблизи линий электропередачи очень опасна. Проводите работы на указанных ниже безопасных расстояниях:
Если экскаватор коснётся высоковольтного провода, оставайтесь сидеть на своём рабочем месте в кабине и предупредите персонал о том, чтобы никто не дотрагивался до экскаватора до отключения тока в линии электро передачи. Если нужно покинуть экскаватор, то следует выпрыгнуть из нее, избегая контакта с экскаватором.
Наблюдайте за препятствиями.
Будьте особенно внимательны при определении расстояний до препятствий во время поворота платформы экскаватора.
При использовании экскаватора для разбивания камней или породы или в случаях, когда возможно падение камней, необходимо в целях безопасности установить переднее и верхнее защитные ограждения.
Избегайте работ на крутых обрывах, утёсах и слабых грунтах, так как при этом есть опасность опрокидывания экскаватора. При работе на обрывах и слабых грунтах убедитесь, что гусеницы повернуты таким образом, что они не мешают Вам покинуть экскаватор в экстренном случае, а гидромотор передвижения находится сзади.
При выполнении подъема грузов принимайте во внимание грузоподъёмность экскаватора, вес и ширину груза.
Никогда не поднимайте груз, вес, которого превышает грузоподъёмность экскаватора, так это может привести к повреждению машины или к несчастному случаю.
Работа на уклонах опасна.
Избегайте проведения работ на уклонах с углом более 10 градусов.
При необходимости работы на уклонах приступайте к ней лишь после формирования плоской площадки. Поворот платформы экскаватора на уклонах является опасной операцией, так как это может привести к опрокидыванию машины.
На уклонах не осуществляйте поворот платформы экскаватора при заполненном ковше, так избегайте остановок и стоянок экскаватора на уклонах.
При остановках опустите ковш на землю и заблокируйте гусеницы.
Машина может потерять равновесие и перевернуться. На уклонах избегайте перемещения экскаватора в поперечном направлении, так как это может привести к переворачиванию или соскальзыванию.
Движение на уклонах опасно.
При движении вниз по уклону необходимо двигаться медленно и поддерживать ковш ни высоте 20-30 см над уровнем земли, чтобы в экстренном случае использовать его как тормоз.
Изменять направление движения экскаватора при движении на уклоне опасно. В случае необходимости изменения направления движения осуществляйте поворот на плоском участке с твёрдым грунтом. Двигатель экскаватора нормально работает на уклонах, не превышающих 35 градусов. Ни при каких условиях не работайте на уклонах, угол которых превышает превышающих эту величину.
Перед началом движения экскаватора подайте звуковой сигнал для предупреждения находящегося поблизости персонала.
При перемещении вперёд и назад будьте внимательны, следите за положением гидромотора передвижения. Уменьшите скорость движения при переезде через препятствие или при движении по неровной дороге. При работе на слабых грунтах установите на грунт плиты или доски для предотвращения проседания экскаватора. При работе в воде или пересечении отмелей проверьте состояние грунта под водой, а также глубину и скорость течения воды, и лишь после этого приступайте к работе, постоянно следя за тем, что уровень воды не был выше уровня катков гусениц.
ПОСАДКА В ЭКСКАВАТОР И ВЫСАДКА ИЗ ЭКСКАВАТОРА
Никогда не запрыгивайте в экскаватор и не выпрыгивайте из него. Никогда не поднимайтесь в машину и не спускайтесь с нее на ходу. Посадку и высадку совершайте лицом к экскаватору и наступайте на ступеньки экскаватора или рамы гусеничной тележки и гусеницу, держась за поручни. Экскаватор может быть оснащён дополнительной ступенькой на гусеничной раме, если установлена более широкая гусеничная цепь. Для этого свяжитесь с местным дистрибьютором фирмы hyundai.
Во время посадки в экскаватор и высадки из экскаватора никогда не держитесь за рычаги управления. В целях безопасности всегда сохраняйте, по крайней мере, три точки опоры: наступая на ступеньки или гусеничную ленту, держитесь за перила. Всегда очищайте поручни, ступеньки и гусеницы от масла и грязи. Если они повреждены, отремонтируйте их и подтяните плохо затянутые болты. Если Вы держитесь за перила при посадке, высадке или передвигаясь по гусеничной ленте, то откройте дверь и надежно зафиксируйте ее в открытом положении. В противном случае дверь может внезапно прийти в движение, в результате чего вы потеряете равновесие и упадете.
ПРИ ТЕХОБСЛУЖИВАНИИ
Немедленно остановите двигатель при обнаружении каких-либо неисправностей в экскаваторе.
Немедленно выясните причину проблемы, как-то: вибрация, перегрев с помощью показаний приборов и индикаторов, расположенных на приборном щитке, а затем устраните эту неисправность.
Для проведения проверок и ремонтных работ припаркуйте экскаватор на плоской площадке и заглушите двигатель. Повесьте плакат, что экскаватор находится в нерабочем состоянии. (Выньте из замка ключ зажигания)
Во время выполнения технического обслуживания необходимо быть особенно внимательным. При обслуживании отдельных деталей и узлов могут потребоваться дополнительные ограждения.
Не снимайте крышку радиатора с горячего двигателя.
Открывайте крышку после того, как двигатель охладился до 50 °С. В противном случае Вы можете обжечься брызгами горячей охлаждающей жидкости или паром.
Не производите работ под экскаватором.
Убедитесь в наличии надёжных опор.
Не используйте в качестве опор для оборудования и съемного рабочего оборудования гидроцилиндры.
Топливо и масло — горючие жидкости.
Храните их в сухом прохладном месте, вдали от открытого пламени.
Не дотрагивайтесь до выхлопной трубы, так как это может привести к серьёзному ожогу.
Не открывайте капот двигателя и защитные крышки во время работы двигателя. При обслуживании двигателя будьте осторожны, чтобы не ударяться о края. Убедитесь, что переднее окно закрыто.
Если боковая дверь должна находиться в открытом положении, установите под неё подпорку.
Следите за тем, чтобы открытая боковая дверь не закрылась под действием внешнего усилия, например, сильного ветра.
Необходимо заменить нескользящее покрытие, если оно износилось или стёрлось.
Проверьте, что на поверхности нет масла, воды, смазки и т. п.
При выполнении работ по обслуживанию двигателя и других элементов на верхней раме будьте осторожны, чтобы не поскользнуться и не упасть. ГАЗ ПОД ВЫСОКИМ ДАВЛЕНИЕМ
Содержится газ под высоким давлением.
Во избежание взрыва или травмы, не подносите огонь, не сваривайте, не сверлите. Прежде чем произвести замену, сбросьте давление.
ПРОУШИНА ДЛЯ ПОДЪЕМА МОЖЕТ УПАСТЬ
При подъеме бака, содержащего жидкость, проушина для подъема или бак могут упасть, что может привести к травме. Перед подъемом всегда опорожняйте бак.
СТОЯНКА
Покидая экскаватор на месте парковки, полностью опустите ковш на землю и переведите рычаг безопасности в положение парковки, а затем выньте ключ зажигания. Надёжно закройте дверь кабины.
Паркуйте экскаватор на плоском и безопасном месте.
Мы надеемся, что, соблюдая все вышеуказанные правила техники безопасности, Вы сможете легко и безопасно работать на экскаваторе.
Для обеспечения безопасной эксплуатации соблюдайте все правила техники безопасности.
Приложение 2