
Шаговые двигатели уже давно и успешно применяются в самых разнообразных устройствах. Их можно встретить в дисководах, принтерах, плоттерах, сканерах, факсах, а также в разнообразном промышленном и специальном оборудовании. Одно из применений в учебных целях — это радиолюбительские модели, исполнительные узлы роботов, привод редукторов точного поворота антенн. Устройство можно также применить в качестве привода в станках для точного сверления и калибровки отверстий небольшого диаметра, в транспортерных линиях и т.п. В настоящее время выпускается множество различных типов шаговых двигателей на все случаи жизни. Однако правильно выбрать тип двигателя — это еще полдела. Не менее важно правильно выбрать схему драйвера и алгоритм его работы, который зачастую определяется программой микроконтроллера.
Шаговые двигатели, преимущества и недостатки.
Шаговые двигатели — это устройства, задача которых преобразование электрических импульсов в поворот вала двигателя на определенный угол. В отличие от обычных двигателей, шаговые двигатели имеют особенности, которые определяют их свойства при использовании в специализированных областях: управляя шаговым двигателем с помощью специального устройства (драйвер шагового двигателя), можно поворачивать его вал на строго заданный угол. Это позволяет применять его там, где требуется высокая точность перемещений. Шаговый двигатель является бесколлекторным двигателем постоянного тока. Как и другие бесколлекторные двигатели, шаговый двигатель высоконадежен и при надлежащей эксплуатации имеет длительный срок службы.
Достоинства истекают из особенностей
Шаговый двигатель может обеспечить очень точное перемещение на заданный угол, причем без обратной связи — поворот ротора зависит от числа поданных импульсов на устройство управления;
- высокая точность позиционирования и повторяемость, так качественные шаговые двигатели имеют точность не хуже 5% от величины шага, при этом данная ошибка не накапливается;
- хорошая надежность двигателя, обусловленная отсутствием щеток, при этом срок службы двигателя ограничивается лишь ресурсом подшипников;
- обеспечивает получение сверхнизких скоростей вращения вала без использования редуктора;
- работа в широком диапазоне скоростей, т.к.
скорость напрямую зависит от количества входных импульсов.
Недостатки
шаговый двигатель подвержен резонансу;
- может пропустить шаги и реальная позиция вала окажется рассинхронизирована с позицией, заданной в управляющей системе;
- низкая удельная мощность шагового привода;
- потребляемая энергия не уменьшается при отсутствии нагрузки;
- малый момент на высоких скоростях.
Виды шаговых двигателей
Существуют три основных типа шаговых двигателей:
Дипломная работа двигатель
... до 4 C B Источник [Электронный ресурс]//URL: https://drprom.ru/kursovaya/na-temu-dvigatel/ Дипломная работа на тему “Принцип работы шаговых двигателей” Пример дипломной работы студента 4 курса физико-математического факультета КОМИ Государственного педагогического института Содержание ...
Двигатели с переменным магнитным сопротивлением.
Шаговые двигатели с переменным магнитным сопротивлением имеют несколько полюсов на статоре и ротор зубчатой формы из магнитомягкого материала. Намагниченность ротора отсутствует. При включение тока в одной из катушек, ротор стремится занять положение, когда магнитный поток замкнут, т.е. зубцы ротора будут находиться напротив тех полюсов, на которых находится запитанная обмотка. Если затем выключить эту обмотку и включить следующую, то ротор поменяет положение, снова замкнув своими зубцами магнитный поток. Таким образом, чтобы осуществить непрерывное вращение, нужно включать фазы попеременно. Двигатель не чувствителен к направлению тока в обмотках. Реальный двигатель может иметь большее количество полюсов статора и большее количество зубцов ротора.
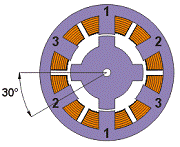
Рисунок 1 — двигатель с переменным магнитным сопротивлением
Двигатели с постоянными магнитами
Двигатели с постоянными магнитами состоят из статора, который имеет обмотки, и ротора, содержащего постоянные магниты. Чередующиеся полюса ротора имеют прямолинейную форму и расположены параллельно оси двигателя. Благодаря намагниченности ротора в таких двигателях обеспечивается больший магнитный поток и, как следствие, больший момент, чем у двигателей с переменным магнитным сопротивлением.
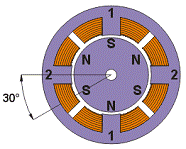
Рисунок 2 — Двигатель с постоянными магнитами Рисунок 3-
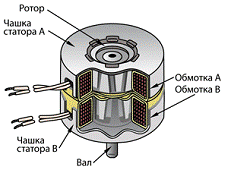
Рисунок 3-Разрез шагового двигателя
Гибридные двигатели
Гибридные двигатели являются более дорогими, чем двигатели с постоянными магнитами, зато они обеспечивают меньшую величину шага, больший момент и большую скорость. Типичное число шагов на оборот для гибридных двигателей составляет от 100 до 400 (угол шага 3.6 — 0.9 град.).
Гибридные двигатели сочетают в себе лучшие черты двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами. Зависимость между числом полюсов ротора, числом эквивалентных полюсов статора и числом фаз определяет угол шага S двигателя:
= 360/(Nph*Ph) = 360/N,
где Nph — чило эквивалентных полюсов на фазу = число полюсов ротора, Ph — число фаз, N — полное количество полюсов для всех фаз вместе.
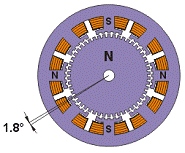
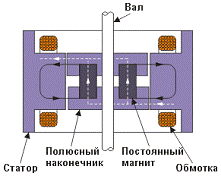
Рисунок 4 — гибридный двигатель Рисунок 5 — продольный разрез
В зависимости от конфигурации обмоток двигатели делятся на биполярные и униполярные. Биполярный двигатель имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля должна переполюсовывается драйвером. Для такого типа двигателя требуется мостовой драйвер, или полумостовой с двухполярным питанием. Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода.
Асинхронный двигатель (2)
... нагрузка, т. е. вращающий момент, который должен развивать двигатель, тем меньше частота вращения ротора. Как показывает кривая Рисунок 3 – Механические характеристики асинхронного двигателя: а – естественная; б ... присущи большие масса, размеры и стоимость, чем асинхронному двигателю с короткозамкнутым ротором. Принцип работы асинхронной машины основан на использовании вращающегося магнитного поля. ...
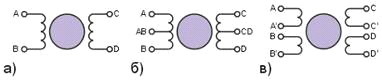
Рисунок 6 —
Биполярный двигатель (а), униполярный (б) и четырехобмоточный (в)
Принцип работы шаговых двигателей
Принцип действия шагового двигателя состоит в том, что при прохождении токов по обмоткам статора (обмоткам управления) ротор развивает синхронизирующий момент, стремящийся переместить его в положение максимального потокосцепления возбужденных обмоток.
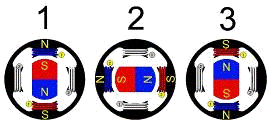
Рисунок 7- разрез двигателя.
Поскольку обмотка 2 обесточена, никакого участия в работе она в данный момент не принимает.
Итак, ротор занял положение устойчивого равновесия и всякое внешнее воздействие, стремящееся его из него вывести, вызовет ответную реакцию в виде синхронизирующего момента. Синхронизирующий момент будет удерживать ротор в фиксированном положении до тех пор, пока устройство управления не переключит обмотки.
Ток при этом потечет по обмотке 2 и ось магнитного поля статора сместится, в данном примере, на 90 градусов. Снова появится синхронизирующий момент, который повернет ротор в новое положение. И снова, при совпадении осей, ротор займет положение устойчивого равновесия. Сделан второй шаг. Как и ранее, синхронизирующий момент будет удерживать ротор в новом положении.
Далее устройство управления снова подключает обмотку 1. Но, теперь с другим направлением тока. Ротор в соответствии с полярностью поля статора делает следующий шаг. Дальше все повторяется по этой схеме, и ротор совершает полный оборот.
Направление вращения ротора можно изменить, изменив последовательность переключения обмоток.
Итак, каждое переключение, сделанное драйвером, соответствует одному шагу ротора.
В реальных двигателях величина углового шага определяется числом тактов коммутации за один период изменения напряжения N и числом пар полюсов двигателя Р.
Способ управления шаговыми двигателями
Существует несколько способов управления фазами шагового двигателя.
Первый способ обеспечивается попеременной коммутации фаз, при этом они не перекрываются, в один момент времени включена только одна фаза (рис 8а).
Этот способ называют ”one phase on” full step или wave drive mode. Точки равновесия ротора для каждого шага совпадают с «естественными» точками равновесия ротора у незапитанного двигателя. Недостатком этого способа управления является то, что для биполярного двигателя в один и тот же момент временииcпользуется 50% обмоток, а для униполярного — только 25%. Это означает, что в таком режиме не может быть получен полный момент.
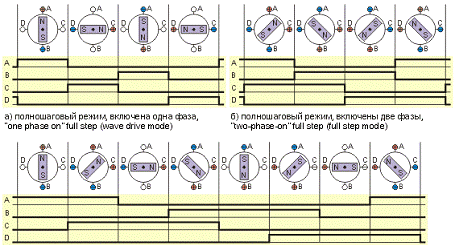
Рисунок 8 — Различные способы управления фазами шагового двигателя
Второй способ — управление фазами с перекрытием: две фазы включены в одно и то же время. Его называют ”two-phase-on” full step или просто full step mode. При этом способе управления ротор фиксируется в промежуточных позициях между полюсами статора (рис. 8б) и обеспечивается примерно на 40% больший момент, чем в случае одной включенной фазы. Этот способ управления обеспечивает такой же угол шага, как и первый способ, но положение точек равновесия ротора смещено на пол-шага.
Курсовая работа модернизация электропривода шагового двигателя шд
... подробно работу самого шагового двигателя, которому и посвящается следующий раздел. 1.1 Устройство Двигатель ШД5, по числу обмоток управления (числу фаз), относится к многофазным (имеет шесть фаз) шаговым двигателям, с электромагнитной связью ротора и ...
Третий способ является комбинацией первых двух и называется полушаговым режимом, ”one and two-phase-on” half step или просто half step mode, когда двигатель делает шаг в половину основного. Этот метод управления достаточно распространен, так как двигатель с меньшим шагом стоит дороже и очень заманчиво получить от 100-шагового двигателя 200 шагов на оборот. Каждый второй шаг запитана лишь одна фаза, а в остальных случаях запитаны две (рис. 8в).
В результате угловое перемещение ротора составляет половину угла шага для первых двух способов управления. Кроме уменьшения размера шага этот способ управления позволяет частично избавиться от явления резонанса. Полушаговый режим обычно не позволяет получить полный момент, хотя наиболее совершенные драйверы реализуют модифицированный полушаговый режим, в котором двигатель обеспечивает практически полный момент, при этом рассеиваемая мощность не превышает номинальной.
Для двигателя, у которого запитана одна обмотка, зависимость момента от угла поворота ротора
относительно точки равновесия является приблизительно синусоидальной. Эта зависимость для двухобмоточного двигателя, который имеет N шагов на оборот (угол шага в радианах S = (2*pi)/N), показана на рис. 9.
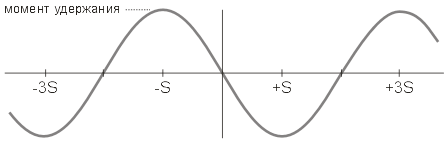
Рисунок 9 — Зависимость момента от угла поворота ротора для одной запитанной обмотки
Реально характер зависимости может быть несколько другой, что объясняется не идеальностью геометрии ротора и статора. Пиковое значение момента называется моментом удержания.
Формула, описывающая зависимость момента от угла поворота ротора, имеет следующий вид:
T = — Th*sin((pi/2)/S)*Ф),
где T — момент, Th — момент удержания, — угол шага,
Ф — угол поворота ротора.
Еще один способ управления называется микрошаговым режимом или micro stepping mode. При этом способе управления ток в фазах нужно менять небольшими шагами, обеспечивая таким образом дробление половинного шага на еще меньшие микрошаги. Когда одновременно включены две фазы, но их токи не равны, то положение равновесия ротора будет лежать не в середине шага, а в другом месте, определяемом соотношением токов фаз. Меняя это соотношение, можно обеспечить некоторое количество микрошагов внутри одного шага. Кроме увеличения разрешающей способности, микрошаговый режим имеет и другие преимущества. Вместе с тем, для реализации микрошагового режима требуются значительно более сложные драйверы, позволяющие задавать ток в обмотках с необходимой дискретностью. Полушаговый режим является частным случаем микрошагового режима, но он не требует формирования ступенчатого тока питания катушек, поэтому часто реализуется. Чтобы получить нужное направление магнитного поля, необходимо выбрать не только правильное
направление токов в катушках, но и правильное соотношение этих токов.
Если одновременно запитаны две обмотки двигателя, но токи в этих обмотках не равны (рис. 10),
Характеристики электроприводов
... ротор имеют три степени свободы [1]. 2. Асинхронный электропривод Асинхронный электродвигатель, электрическая асинхронная ... асинхронный электродвигатель с таким ротором, как двигатель со специальными пусковыми характеристиками. ... что частота вращения ротора n меньше частоты вращения поля, ротор совершает асинхронное вращение ... Электромагнитный момент в электрических машинах приложен и к ротору, и ...
то результирующий момент будет
= ( a2 + b2 )0.5,
а точка равновесия ротора сместится в точку
x = ( S / (pi/2) ) arctan( b / a ),
где a и b — момент, создаваемый первой и второй фазой соответственно,- результирующий момент удержания,- положение равновесия ротора в радианах,- угол шага в радианах.
Смещение точки равновесия ротора говорит о том, что ротор можно зафиксировать в любой произвольной позиции. Для этого нужно лишь правильно установить отношение токов в фазах.
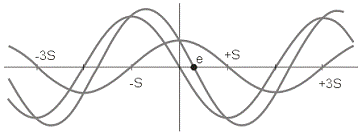
Рисунок 10 — Зависимость момента от угла поворота ротора в случае разных значений тока фаз
Характеристики шаговых двигателей
Существуют статические и динамические характеристики.
Статические характеристики- характеристики, относящиеся к заторможенному двигателю.
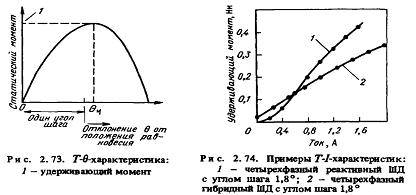
Рисунок 11- характеристики шаговых двигателей
Т-Ө-характеристика. Шаговый двигатель фиксирует неподвижно в положении равновесия при возбуждающем токе, поданном по определенной схеме возбуждения (одно-или двухфазной).
Если теперь к ротору приложить внешний момент , он вызовет угловое смещение. Отношения внешнего момента Т к угловому смещению Ө приведено на рисунке. Эта кривая называется статической моментной характеристикой Т-Ө. Максимальный статический момент называется удерживающим моментом. Строго удерживающий момент определяется как максимальный статический момент, который может быть приложен к валу возбужденного двигателя без последующего движения.I-характеристика. Удерживающий момент возрастает с ростом тока. Максимальный статический момент ,существующий в гибридном двигателе с невозбужденной обмоткой, является фиксирующим моментом.
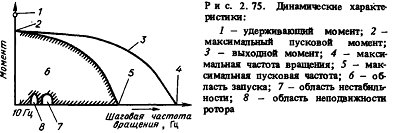
Динамические характеристики -характеристики двигателя во время движения либо в его начале.
Характеристики пускового момента определяются диапазоном значений момента сопротивления нагрузки, в котором двигатель может запускаться и останавливаться без потери шага для различных частот в наборе импульсов.
Характеристики выходного момента иначе называются характеристиками в движении. После того, как выбранный двигатель запустился при определенном управлении, обеспечивающем заданный способ возбуждения в пусковом диапазоне, частота импульсов постепенно возрастает. Кривая выходной характеристики зависит от схемы правления, способа стыковки, измерительных приборов и других условий.
Максимальная частота приемистости определяется как максимальная управляющая частота, при которой ненагруженный двигатель может запускаться и останавливаться без пропуска шагов.
Максимальная выходная частота вращения определяется как максимальная частота вращения, при которой ненагруженный двигатель может двигаться без пропуска шагов.
Максимальный пусковой момент определяется как максимальный момент сопротивления нагрузки, с которой двигатель может запускаться и сохранять синхронность при наборе импульсов с частотой до 10Гц.
Характеристика двигателей внутреннего сгорания
... нагрузки, характеризующиеся значительным размахом и частотой колебаний. Над совершенствованием и созданием новых схем и типов двигателей внутреннего сгорания работают многие ученые, ... перспективный турбокомпаундный дизель, серия дизельных и бензиновых экологически чистых двигателей традиционной компоновки, двигатели, работающие на водородном топливе, плавающие транспортные средства высокой ...
Рисунок 12 — динамические характеристики
Резонанс шаговых двигателей
Шаговым двигателям свойственен нежелательный эффект, называемый резонансом. Эффект проявляется в виде внезапного падения момента на некоторых скоростях. Это может привести к пропуску шагов и потере синхронности. Эффект проявляется в том случае, если частота шагов совпадает с собственной резонансной частотой ротора двигателя.
Когда двигатель совершает шаг, ротор не сразу устанавливается в новую позицию, а совершает затухающие колебания. Дело в том, что систему ротор — магнитное поле — статор можно и рассматривать как пружинный маятник, частота колебаний которого зависит от момента инерции ротора (плюс нагрузки) и величины магнитного поля. Ввиду сложной конфигурации магнитного поля, резонансная частота ротора зависит от амплитуды колебаний. При уменьшении амплитуды частота растет, приближаясь к малоамплитудной частоте, которая более просто вычисляется количественно. Эта частота зависит от угла шага и от отношения момента удержания к моменту инерции ротора. Больший момент удержания и меньший момент инерции приводят к увеличению резонансной частоты.
Резонансная частота вычисляется по формуле:
F0 = (N*TH/(JR+JL))0.5/4*pi,
где F0 — резонансная частота, — число полных шагов на оборот, — момент удержания для используемого способа управления и тока фаз, — момент инерции ротора, — момент инерции нагрузки.
Необходимо заметить, что резонансную частоту определяет момент инерции собственно ротора двигателя плюс момент инерции нагрузки, подключенной к валу двигателя. Поэтому резонансная частота ротора ненагруженного двигателя, которая иногда приводится среди параметров, имеет маленькую практическую ценность, так как любая нагрузка, подсоединенная к двигателю, изменит эту частоту.
На практике эффект резонанса приводит к трудностям при работе на частоте, близкой к резонансной. Момент на частоте резонанса равен нулю и без принятия специальных мер шаговый двигатель не может при разгоне пройти резонансную частоту. В любом случае, явление резонанса способно существенно ухудшить точностные характеристики привода.
В системах с низким демпфированием существует опасность потери шагов или повышения шума, когда двигатель работает вблизи резонансной частоты. В некоторых случаях проблемы могут возникать и на гармониках частоты основного резонанса.
Когда используется не микрошаговый режим, основной причиной появления колебаний является прерывистое вращение ротора. При осуществлении шага ротору толчком сообщается некоторая энергия. Этот толчок возбуждает колебания. Энергия, которая сообщается ротору в полушаговом режиме, составляет около 30% от энергии полного шага. Поэтому в полушаговом режиме амплитуда колебаний существенно меньше. В микрошаговом режиме с шагом 1/32 основного при каждом микрошаге сообщается всего около 0.1% от энергии полного шага. Поэтому в микрошаговом режиме явление резонанса практически незаметно.
Для борьбы с резонансом можно использовать различные методы. Например, применение эластичных материалов при выполнении механических муфт связи с нагрузкой. Эластичный материал способствует поглощению энергии в резонансной системе, что приводит к затуханию паразитных колебаний. Другим способом является применение вязкого трения. Выпускаются специальные демпферы, где внутри полого цилиндра, заполненного вязкой кремнийорганической смазкой, может вращаться металлический диск. При вращении этой системы с ускорением диск испытывает вязкое трение, что эффективно демпфирует систему. Существуют электрические методы борьбы с резонансом. Колеблющийся ротор приводит к возникновению в обмотках статора ЭДС. Если закоротить обмотки, которые на данном шаге не используются, это приведет к демпфированию резонанса.
Асинхронный двигатель с короткозамкнутым ротором
... цепи трехфазного асинхронного двигателя с короткозамкнутым ротором. Обмотка статора с трапецеидальными полузакрытыми пазами. Тепловой и вентиляционный расчеты, расчет массы и динамического момента инерции. курсовая работа, добавлен 22.03.2018 Расчет статора, ротора, магнитной цепи и потерь асинхронного двигателя. Определение параметров ...
И, наконец, существуют методы борьбы с резонансом на уровне алгоритма работы драйвера. Например, можно использовать тот факт, что при работе с двумя включенными фазами резонансная частота примерно на 20% выше, чем с одной включенной фазой. Если резонансная частота точно известна, то ее можно проходить, меняя режим работы. Если это возможно, при старте и остановке нужно использовать частоты выше резонансной.
Увеличение момента инерции системы ротор-нагрузка уменьшает резонансную частоту. Однако, самой эффективной мерой для борьбы с резонансом является применение микрошагового режима.
Зубчатая структура шагового двигателя, число шагов за оборот.
В механизме создания момента наиболее важной характеристикой шагового двигателя (ШД) являются его зубцы. В ШД зубцы как ротора ,так и статора играют существенную роль в создании момента и фиксирование ротора в определенном угловом положении.
Зубчатые структуры различных ШД могут быть разбиты на три основных типа. В ЩД первого типа, статор и ротор имеют одинаковое количество зубцов. Этот тип используется для многопакетных реактивных ШД. В такой структуре все зубцы возбуждаются и отключаются в одно и то же время. Во втором типе число зубцов статора и ротора различно. Эта структура используется в однопакетных реактивных ШД с большим углом шага, и в такой машине не все зубцы возбуждаются в одно и тоже время. В ШД третьего типа зубцы статора объединены в группы на полюсах, а зубцы ротора разделены равномерно по его краю. Эта структура используется в однопакетных реактивных ШД с малым углом шага и гибридных ШД.
При конструировании ШД одной из важнейших проблем является опре- деление отношения ширины зубца к ширине паза между зубцами, так как оно сильно влияет на статический момент, а также на динамические характеристики.
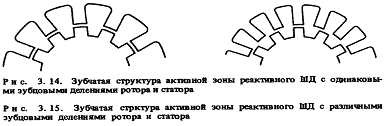
Рисунок 13 — зубчатая структура
Несмотря на существующие различия в конструкциях, все двигатели создают момент благодаря реактивному действию зубцов .Максимальный средний момент получается при минимально возможном воздушном зазоре и оптимальное отношение ширины зубца к зубцовому делению t/ƛ теоретически равно 0.42 и не зависит от размеров.
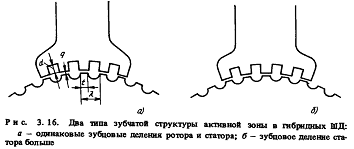
Рисунок 14 — типы зубчатой структуры
Управление асинхронным двигателем с короткозамкнутым ротором
... работой двигателя при малых скольжениях также увеличиваются. При регулировании частоты в процессе управления скоростью асинхронного двигателя возникает необходимость изменения и амплитуды (действующего значения) напряжения источника питания. Так, электродвижущая сила обмотки статора асинхронного двигателя ...
- Отношение ширины зубца к зубцовому делению для статора около 0.5 2. Глубина паза между зубцами d в статоре порядка половины зубцового деления ƛ.
- Отношение t/ƛ для ротора в пределах от 0.38 до 0.45
- Форма паза между забцами-полуокружность для ротора и либо прямоугольная, либо полуокружность для статора.
- Ширина воздушного зазора g берется как можно меньше с учетом существующей технологии массового производства, она обычно составляет 0.05мм,но в отдельных случаях равна 0.02мм.
Связь между числом зубцов, количеством шагов за один оборот и числом фаз.
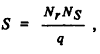
Число фаз m,зубцов ротора Nr и количество шагов за один оборот S связаны основным уравнением:
![]() (1)
(1)
Оно справедливо для однофазного или двухфазного управления, но для полушагового используется:
![]()
(2)
Для поворота ротора на один шаг необходимо передать m возбуждающих импульсов управления, но для выполнения полного оборота необходимо mNr импульсов.
При рассмотрение зубчатой структуры второго типа, в которой статор и ротор имеют различные шаги зубцов, получаем соотношение
![]() (3)
(3)
Где Nr- число зубцов ротора;Ns-статора;
Число зубцов статора на фазу:
 (4)
(4)
 (5)
(5)
![]() (6)
(6)
Из уравнений 3,4,6 получается зависимость между q, S, m:
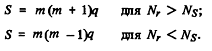 (7)
(7)
Шаговый двигатель с коническим редуктором
- Выбираем шаговый двигатель.
Технические характеристики BSHB31112:
Характеристика
Фланец, мм 110
Точность шага 5%
Максимальная температура 80°
Температура эксплуатации -20 °С ~+50 °С
Сопротивление изоляции, мин 100M 500VDC
Допустимая радиальная нагрузка 0.06mm Max (450g load)
Допустимая осевая нагрузка 0.08mm Max (450g load)
Шаг 1,2°
Длина, мм 124,5
Момент на валу, Н.м 10
Ток фазы, A 2,5
Питание AC220V3.5A
Инерция ротора, кг*см2 6
Масса, Кг 5,35
Список используемой литературы
[Электронный ресурс]//URL: https://drprom.ru/kursovaya/elektroprivod-s-shagovyim-dvigatelem/
шаговый двигатель сопротивление ротор
Чернавский С. А. Курсовое проектирование деталей машин. М. Машиностроение, 1979.
Куклин Н.Г., Куклина Г.С. Детали машин: Учеб. для машиностроит. спец. техникумов. — 4-е изд., перераб. и доп. — М.: Высш. шк., 1987. — 383 с.: ил.
Анурьев В.И. Справочник конструктора-машиностроителя Т.1. М.: Машиностроение, 1978. 728с., ил.
Анурьев В.И. Справочник конструктора-машиностроителя Т.1. 2.: Машиностроение, 1978. 728с., ил.