
гироскоп механический оптический приборостроение
До изобретения гироскопа человечество использовало различные методы определения направления в пространстве. Издревле люди ориентировались визуально по удалённым предметам, в частности, по Солнцу. Уже в древности появились первые приборы: отвес и уровень, основанные на гравитации. В средние века в Китае был изобретён компас, использующий магнетизм Земли. В Европе были созданы астролябия и другие приборы, основанные на положении звёзд.
Гироскоп изобрёл Иоганн Боненбергер и опубликовал описание своего изобретения в 1817 году. Однако французский математик Пуассон ещё в 1813 году упоминает Боненбергера как изобретателя этого устройства. Главной частью гироскопа Боненбергера был вращающийся массивный шар в кардановом подвесе. В 1832 году американец Уолтер Р. Джонсон придумал гироскоп с вращающимся диском. Французский учёный Лаплас рекомендовал это устройство в учебных целях. В 1852 году французский учёный Фуко усовершенствовал гироскоп и впервые использовал его как прибор, показывающий изменение направления, через год после изобретения маятника Фуко, тоже основанного на сохранении вращательного момента. Именно Фуко придумал название «гироскоп». Фуко, как и Боненбергер, использовал карданов подвес. Не позже 1853 года Фессель изобрёл другой вариант подвески гироскопа.
Преимуществом гироскопа перед более древними приборами являлось то, что он правильно работал в сложных условиях (плохая видимость, тряска, электромагнитные помехи).
Однако вращение гироскопа быстро замедлялось из-за трения.
Во второй половине XIX века было предложено использовать электродвигатель для разгона и поддержания вращения гироскопа. Впервые на практике гироскоп был применён в 1880-х годах инженером Обри для стабилизации курса торпеды. В XX веке гироскопы стали использоваться в самолётах, ракетах и подводных лодках вместо компаса или совместно с ним.
Гироскоп — навигационный прибор, основным элементом которого является быстро вращающийся ротор, закрепленный так, что ось его вращения может поворачиваться.
Цель курсовой работы изучить свойства гироскопа, углубить свои теоретические знания, расширить и закрепить их, научиться работать самостоятельно, приобрести умение формулировать свои суждения, последовательно их излагать и строить логические доказательства.
Задачей курсовой работы является анализ работы гироскопа потенциальной чувствительности прибора. На основе свойства взаимности необходимо рассмотреть минимальную конфигурацию гироскопа. Затем оценить современное состояние элементной базы. Рассмотреть основные элементы гироскопа. Основной задачей курсовой работы является рассмотрение ключевых аспектов на основе анализа погрешностей его элементов и качественной оценки точностных характеристик устройства с учетом использования различных подходов к решению проблемы повышения его чувствительности. Отдельно отразить технико-экономические аспекты работы, вопросы безопасности жизнедеятельности при проведении исследований, а также проблемы экологической безопасности при использовании прибора.
Автоматизация работы кинотеатра
... тип поля; длина поля; задаются идентификаторы полей; описание полей. Для автоматизации работы кинотеатра необходимы следующие таблицы: films (афиша); pay (оплата); places ( ... данных. 1.2 Постановка задачи Поставленная задача курсовой работы: работа кинотеатров. Целью курсовой работы является реализация автоматизированной системы управления работой кинотеатра. Требуется создать в среде Delphi ...
1.1 Механические гироскопы
Среди механических гироскопов выделяется роторный гироскоп — быстро вращающееся твёрдое тело, ось вращения которого может свободно изменять ориентацию в пространстве. При этом скорость вращения гироскопа значительно превышает скорость поворота оси его вращения. Основное свойство такого гироскопа — способность сохранять в пространстве неизменное направление оси вращения при отсутствии воздействия на него моментов внешних сил и эффективно сопротивляться действию внешних моментов сил. Это свойство в значительной степени определяется величиной угловой скорости собственного вращения гироскопа.
Впервые это свойство использовал Фуко в 1852 г. для экспериментальной демонстрации вращения Земли. Именно благодаря этой демонстрации гироскоп и получил своё название от греческих слов «вращение», «наблюдаю».
Свойства трехстепенного роторного гироскопа
При воздействии момента внешней силы на оси, перпендикулярной оси вращения ротора, гироскоп начинает поворачиваться вокруг оси прецессии, которая перпендикулярна моменту внешних сил. Это свойство обусловлено возникновением так называемой кориолисовой силы. Так, при воздействии момента внешней силы гироскоп поначалу будет вращаться именно в направлении действия внешнего момента (нутационный бросок).
Каждая частица гироскопа будет таким образом двигаться с переносной угловой скоростью вращения вследствие действия этого момента. Но ротор гироскопа, помимо этого, и сам вращается, поэтому каждая частица будет иметь относительную скорость. В результате возникает кориолисова сила, которая заставляет гироскоп двигаться в перпендикулярном приложенному моменту направлении, то есть прецессировать. Прецессия вызовет кориолисову силу, момент которой скомпенсирует момент внешней силы (гироскопический момент).
Гироскопический эффект вращающихся тел есть проявление коренного свойства материи — её инерционности.
Упрощённо, поведение гироскопа описывается уравнением:
![]()
Вибрационные гироскопы
Вибраци о нный гироскоп, прибор для определения угловой скорости объекта, содержащий реагирующие на вращение объекта вибрирующие детали. Различают вибрационные гироскопы стержневого и роторного типа. У стержневого типа чувствительным элементом являются некоторые вибрирующие массы, например стержни, подобные ветвям камертона. Один из вибрационного гироскопа стержневого типа, получивший практическое применение, называется гиротроном. Его чувствительным элементом является вибратор, состоящий из стержней, упругого торсиона связывающего стержни с основанием вибратора, пластинки, жестко скрепленной с торсионом и перемещающейся в поле катушек, укрепленных на основании. Ветви вибратора-камертона с помощью специальной электрической. схемы приводятся в колебательное движение. Если при этом объект вместе с основанием вибратора поворачивается вокруг оси с угловой скоростью wV , то возникает момент кориолиса сил инерции, вызывающий крутильные колебания вибратора вокруг оси. При этом пластинка колеблется между катушками; амплитуда колебаний пропорциональна угловой скорости wV . Значение wV снимают с катушек с помощью радиотехнических методов. Прибор обладает рядом достоинств: отсутствие карданова подвеса, вращающихся и трущихся частей; наличие одной оси чувствительности; линейность показаний; высокая надёжность. Принцип работы роторного вибрационного гироскопа аналогичен, но вместо стержней и пластин вибрирующим элементом является вращающийся ротор с упругим подвесом. Однако создание этого гироскопа сопряжено с рядом технических трудностей. Возможности применения гироскопа весьма разнообразны. Наиболее просто прибор используется в качестве измерителя угловой скорости объекта. Вибрационные гироскопы могут также найти применение в системах гироскопической стабилизации, в инерциальных навигационных системах и др. областях гироскопической техники.
Лазерный гироскоп
... а для измерения угловой скорости достаточно определить его частоту. Лазерный гироскоп обладает угловым разрешением, недоступным механическим гироскопам. Так, если оптический ... скорость вращения гироскопа значительно превышает скорость поворота оси его вращения. Основное свойство такого гироскопа -- способность сохранять в пространстве неизменное направление оси вращения при отсутствии воздействия на ...
Разновидности
- Гироскоп на МАКС-2009
- Пьезоэлектрические гироскопы.
— Твёрдотельные волновые гироскопы. Работа одной из разновидностей твердотельных волновых гироскопов разработанные с 80-х гг. компаниями GE Marconi, GE Ferranti (ВБ), Watson Industires Inc. (США), Inertial Engineering Inc. (США) Innalabs, и другими основаны на управлении двумя стоячими волнами в физическом теле — резонаторе, который может быть как осесимметричным, так и циклически-симметричным. При этом, осесимметричная форма резонатора позволяет достичь характеристик гироскопа, а именно: значительно увеличить срок жизни гироскопа и его удароустойчивость, что критично для многих систем стабилизации. Таким образом, стоячие волны — это колебания эллиптической формы с четырьмя пучностями и четырьмя узлами, расположенными по окружности края резонатора. Угол между смежными узлами составляет 45 градусов. Эллиптическая форма колебаний возбуждается до определенной амплитуды. Когда гироскоп поворачивается вокруг оси чувствительности, результирующие Кориолисовы силы, воздействующие на элементы вибрирующей массы резонатора, возбуждают парную форму колебаний. Угол между главными осями двух режимов составляет 45 градусов.
Замкнутый контур управления (компенсационная обратная связь) гасит парную форму колебания к нулю. Амплитуда силы (т.е. сигнал пропорциональные току или электрическому напряжению в цепи компенсационной обратной связи), необходимая для этого, пропорциональна угловой скорости вращения датчика. Соответствующая система замкнутого контура управления называется компенсационной. Для генерирования компенсационной силы и считывания вызванных движений используются пьезоэлектрические элементы, закреплённые на резонаторе. Подобная электромеханическая система в высокой степени эффективна и обеспечивает низкий уровень шума выходного сигнала и широкий диапазон измерения, необходимые для многих «тактических» применений (хотя и снижает чувствительность датчика пропорционально расширению его диапазона измерений).
Технология текущего ремонта электродвигателей с короткозамкнутым ротором
... сила Fэм. Силы, действующие на все проводники обмотки ротора, создают вращающий момент, увлекающий ротор вслед за полем. Ротор двигателя вращается с асинхронной скоростью k меньшей, чем синхронная скорость вращения ... с короткозамкнутым ротором; o составить технологическую карту ремонта и обслуживания асинхронного двигателя; o сделать экономические расчёты ремонтных работ; o проанализировать ...
Отметим, что упомянутые гироскопы используют современные сплавы инварного типа с паянными пьезоэлектрическими элементами ввода-вывода или пьезокерамические резонаторы с вжиганием электродов. В любой случае, их добротность теоретически ограничена величинами порядка 100 тыс. (на практике, обычно, не выше 20 тыс.), что на несколько порядков ниже много-миллионной добротности резонаторов из кварцевого стекла или монокристаллов, используемых для «стратегических» применений.
- Камертонные гироскопы.
- Вибрационные роторные гироскопы.
1.2 Оптические гироскопы
Делятся на лазерные (активные оптические) гироскопы, пассивные оптические гироскопы, волоконно-оптические и интегрально-оптические. Принцип действия основан на эффекте Саньяка, открытом в 1913 году. Теоретически он объясняется с помощью специальной теории относительности — описывающая движение, законы механики и пространственно-временные отношения при произвольных скоростях движения, меньших скорости света в вакууме, в том числе близких к скорости света. Согласно этой теории скорость света постоянна в любой инерциальной системе отсчёта. В то время как в неинерциальной системе она может отличаться. При посылке луча света в направлении вращения прибора и против направления вращения разница во времени прихода лучей (определяемая интерферометром) позволяет найти разницу оптических путей лучей в инерциальной системе отсчёта, и, следовательно, величину углового поворота прибора за время прохождения луча. Величина эффекта прямо пропорциональна угловой скорости вращения интерферометра и площади, охватываемой путём распространения световых волн в интерферометре:
где — разность времён прихода лучей, выпущенных в разных направлениях, — площадь контура, Ω — угловая скорость вращения гироскопа. Так как величина очень мала, то её прямое измерение с помощью пассивных интерферометров возможно только в волоконно-
оптических гироскопах с длинной волокна 500-1000 м. Во вращающемся кольцевом интерферометре лазерного гироскопа можно измерить фазовый сдвиг встречных волн, равный
![]()
где — длина волны.

Рисунок 1.1. — Схема лазерного гироскопа
1.3 Двухстепенный гироскоп
Во многих гироскопических приборах используется упрощенный, двухстепенный вариант гироскопа, в котором наружная рамка трехстепенного гироскопа устранена, а полуоси внутренней закрепляются непосредственно в стенках корпуса, жестко связанного с движущимся объектом. Если в таком устройстве единственная рамка ничем не ограничена, то момент внешней силы относительно оси, связанной с корпусом и перпендикулярной оси рамки, заставит ось собственного вращения ротора непрерывно прецессировать в сторону от этого первоначального направления. Прецессия будет продолжаться до тех пор, пока ось собственного вращения не окажется параллельной направлению момента силы, т.е. в положении, при котором гироскопический эффект отсутствует. На практике такая возможность исключается благодаря тому, что задаются условия, при которых поворот рамки относительно корпуса не выходит за пределы малого угла. Если прецессия ограничивается только инерционной реакцией рамки с ротором, то угол поворота рамки в любой момент времени определяется проинтегрированным ускоряющим моментом. Поскольку момент инерции рамки обычно сравнительно мал, она слишком быстро реагирует на вынужденное вращение. Имеются два способа устранить этот недостаток.
Методы измерения силы
... метод измерения сил основан на измерении угловой скорости прецессии рамки гироскопа, возникающей под воздействием гироскопического момента, уравновешивающего измеряемый момент или момент, создаваемый измеряемой силой. Этот ... измерительного устройства измеряемая сила Fx определяется по частоте вращения двигателя. Силовой метод Основан на зависимости силы или момента сил, развиваемых неупругим или ...
Противодействующая пружина и вязкостный демпфер . Датчик угловой скорости. Прецессию оси вращения ротора в направлении вектора момента силы, направленного вдоль оси, перпендикулярной оси рамки, можно ограничить пружиной и демпфером, воздействующими на ось рамки. Ось вращающегося ротора закреплена в рамке перпендикулярно оси вращения последней относительно корпуса. Входной осью гироскопа называется направление, связанное с основанием, перпендикулярное оси рамки и оси собственного вращения ротора при недеформированной пружине.
Момент внешней силы относительно опорной оси вращения ротора, приложенный к основанию в тот момент времени, когда основание не вращается в инерциальном пространстве и, следовательно, ось вращения ротора совпадает со своим опорным направлением, заставляет ось вращения ротора прецессировать в сторону входной оси, так что угол отклонения рамки начинает увеличиваться. Это эквивалентно приложению момента силы к противодействующей пружине, в чем состоит важная функция ротора, который в ответ на возникновение входного момента силы создает момент силы относительно выходной оси. При постоянной входной угловой скорости выходной момент силы гироскопа продолжает деформировать пружину, пока создаваемый ею момент силы, воздействующий на рамку, не заставит ось вращения ротора прецессировать вокруг входной оси. Когда скорость такой прецессии, вызванной моментом, создаваемым пружиной, сравняется с входной угловой скоростью, достигается равновесие и угол рамки перестает изменяться. Таким образом, угол отклонения рамки гироскопа позволяет судить о направлении и угловой скорости поворота движущегося объекта.
Датчик угловой скорости
Прецессию оси вращения ротора в направлении вектора момента силы, направленного вдоль оси, перпендикулярной оси рамки, можно ограничить пружиной и демпфером, воздействующими на ось рамки. Кинематическая схема двухстепенного гироскопа с противодействующей пружиной представлена на (рисунок 1.2).
Ось вращающегося ротора закреплена в рамке перпендикулярно оси вращения последней относительно корпуса. Входной осью гироскопа называется направление, связанное с основанием, перпендикулярное оси рамки и оси собственного вращения ротора при недеформированной пружине.
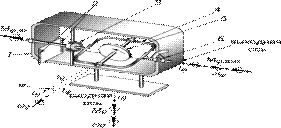
1 — корпус; 2 — пружины; 3 — вязкостный демпфер; 4 — рамка; 5 — ротор; 6 — указатель выходного угла рамки
Рисунок 1.2. — Двухстепенной гироскоп с противодействующей пружиной
Современные МЭМС-гироскопы и акселерометры
... скорости за счет использования эффекта «силы Кориолиса». Во время вращения гироскопа силы Кориолиса действуют на кремниевое кольцо, ... МЭМС-устройств. В их числе – одноосевой МЭМС-гироскоп с вибрирующим кольцом и трехосевой емкостной МЭМС-акселерометр. 2. Одноосевой МЭМС-датчик угловой скорости (гироскоп) ... В данном случае гироскоп выключен, кольцо круглое. Рис. 5 В момент, когда датчик находится ...
Момент внешней силы относительно опорной оси вращения ротора, приложенный к основанию в тот момент времени, когда основание не вращается в инерциальном пространстве и, следовательно, ось вращения ротора совпадает со своим опорным направлением, заставляет ось вращения ротора прецессировать в сторону входной оси, так что угол отклонения рамки начинает увеличиваться. Это эквивалентно приложению момента силы к противодействующей пружине, в чем состоит важная функция ротора, который в ответ на возникновение входного момента силы создает момент силы относительно выходной оси (рисунок 1.2).
При постоянной входной угловой скорости выходной момент силы гироскопа продолжает деформировать пружину, пока создаваемый ею момент силы, воздействующий на рамку, не заставит ось вращения ротора прецессировать вокруг входной оси. Когда скорость такой прецессии, вызванной моментом, создаваемым пружиной, сравняется с входной угловой скоростью, достигается равновесие и угол рамки перестает изменяться. Таким образом, угол отклонения рамки гироскопа (рисунок 1.2), указываемый стрелкой на шкале, позволяет судить о направлении и угловой скорости поворота движущегося объекта.
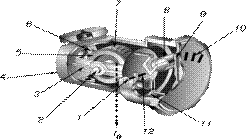
1 — регулировка противодействующей пружины; 2 — ось собственного вращения ротора; 3 — рамка; 4 — корпус; 5 — ротор; 6 — воздушное сопло; 7 — турбинный обод ротора; 8 — демпфер рамки; 9 — стрелка; 10 — шкала; 11 — указывающая система; 12 — противодействующая пружина.
Рисунок 1.3. — Основные элементы указателя угловой скорости
Вязкостное демпфирование
Для гашения выходного момента силы относительно оси двухстепенного гироузла можно использовать вязкостное демпфирование.
Кинематическая схема такого устройства представлена на (рисунке 1.3) она отличается от схемы на (рисунке 1.4) тем, что здесь нет противодействующей пружины, а вязкостный демпфер увеличен. Когда такое устройство поворачивается с постоянной угловой скоростью вокруг входной оси, выходной момент гироузла заставляет рамку прецессировать вокруг выходной оси. За вычетом эффектов инерционной реакции этот момент уравновешивается моментом сил вязкостного сопротивления, создаваемым демпфером. Момент демпфера пропорционален угловой скорости вращения рамки относительно корпуса, так что выходной момент гироузла тоже пропорционален этой угловой скорости. Поскольку этот выходной момент пропорционален входной угловой скорости, выходной угол рамки увеличивается по мере того, как корпус поворачивается вокруг входной оси. Стрелка, движущаяся по шкале (рисунок 1.4), указывает угол поворота рамки. Показания пропорциональны интегралу угловой скорости вращения относительно входной оси в инерциальном пространстве, и поэтому устройство, схема которого представлена на (рисунке 1.3), называется интегрирующим двухстепенным гиродатчиком.
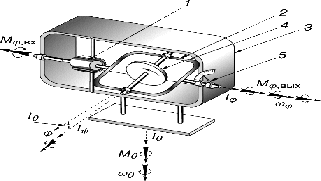
Рисунок 1.4 — Вязкостное демпфирование двухстепенного гироскопа
Управление асинхронным двигателем с короткозамкнутым ротором
... скорость вращения ротора. Подстановка (1.6) в (1.5) в предположении, что при регулировании скорости , дает где - скольжение двигателя. Анализ выражения (1.7) показывает, что КПД асинхронного двигателя существенно зависит от скольжения. Потери в двигателе ... двигателя. М.П.Костенко сформулировал закон частотного управления : «Если сконструировать асинхронный двигатель для частоты , момента ...
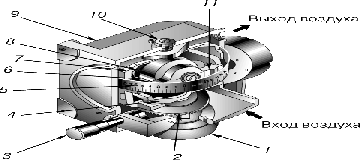
На (рисунке 1.4) изображен интегрирующий гиродатчик, ротор которого заключен в герметично запаянный стакан, плавающий в демпфирующей жидкости. Сигнал угла поворота плавающей рамки относительно корпуса вырабатывается индукционным датчиком угла.
Положение поплавкового гироузла в корпусе задает датчик момента в соответствии с поступающими на него электрическими сигналами. Интегрирующие гиродатчики обычно устанавливают на элементах, снабженных сервоприводом и управляемых выходными сигналами гироскопа. При таком расположении выходной сигнал датчика момента можно использовать как команду на поворот объекта в инерциальном пространстве.
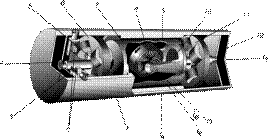
1 — корпус; 2 — балансировочные гайки; 3 — балансировочные вилки; 4 — подшипник рамки; 5 — якорь датчика момента; 6 — статор датчика момента; 7 — стакан поплавкового гироузла; 8 — гиромотор; 9 — демпферный зазор; 10 — рамка; 11 — индукционный датчик угла; 12 — подшипник рамки.
Рисунок 1.5. — Интегрирующий гиродатчик двухстепенного типа
1.4 Гироскоп с тремя степенями свободы
На (рисунке 1.6) дана упрощенная кинематическая схема гироскопа с тремя степенями свободы (тремя осями вращения), причем направления вращения на ней показаны изогнутыми стрелками. Кинетический момент представлен жирной прямой стрелкой, направленной вдоль оси собственного вращения ротора. Момент силы прикладывается нажатием пальца так, что он имеет составляющую, перпендикулярную оси собственного вращения ротора (вторую силу пары создают вертикальные полуоси, закрепленные в оправе, которая связана с основанием).
Согласно законам Ньютона, такой момент силы должен создавать кинетический момент, совпадающий с ним по направлению и пропорциональный его величине. Поскольку же кинетический момент (связанный с собственным вращением ротора) фиксирован по величине (заданием постоянной угловой скорости посредством, скажем, электродвигателя), это требование законов Ньютона может быть выполнено только за счет поворота оси вращения (в сторону вектора внешнего момента силы), приводящего к увеличению проекции кинетического момента на эту ось. Этот поворот и есть прецессия, о которой говорилось ранее. Скорость прецессии возрастает с увеличением внешнего момента силы и убывает с увеличением кинетического момента ротора. Гироскопический указатель курса. Применения трехстепенного гироскопа в авиационном указателе курса (гирополукомпасе).
Вращение ротора в шарикоподшипниках создается и поддерживается струей сжатого воздуха, направленной на рифленую поверхность обода. Внутренняя и наружная рамки карданова подвеса обеспечивают полную свободу вращения оси собственного вращения ротора. По шкале азимута, прикрепленной к наружной рамке, можно ввести любое значение азимута, выровняв ось собственного вращения ротора с основанием прибора. Трение в подшипниках столь незначительно, что после того как это значение азимута введено, ось вращения ротора сохраняет заданное положение в пространстве, и, пользуясь стрелкой, скрепленной с основанием, по шкале азимута можно контролировать поворот самолета. Показания поворота не обнаруживают никаких отклонений, если не считать эффектов дрейфа, связанных с несовершенствами механизма, и не требуют связи с внешними (например, наземными) средствами навигации.
Ротор. по курсу Нефтегазопромысловое дело
... предупреждающие возможность проникновения бурового раствора внутрь станины и выбрасывание смазки из ротора при вращении стола. Приводной вал 6 установлен в станине на двух роликовых подшипниках, один ... колонны , спущенной в скважину, и действующие динамические нагрузки – радиальную, от передаваемого крутящего момента, и осевую, от трения ведущей трубы о вкладыши при подаче колонны труб, ...
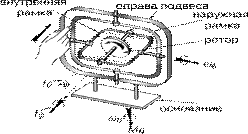
Рисунок 1.6. — Гироскоп с тремя степенями свободы
Гироскопический указатель курса
На (рисунке 1.7) показан пример применения трехстепенного гироскопа в авиационном указателе курса (гирополукомпасе).
1 — основание; 2 — зубчатое колесо синхронизатора; 3 — ручка арретира; 4 — арретир; 5 — шкала азимута; 6 — воздушное сопло; 7 — наружная рамка; 8 — ротор; 9 — корпус; 10 — полуось наружной рамки с фиксаторной гайкой; 11 — внутренняя рамка.
Рисунок 1.7. — Авиационный гироуказатель курса с воздушным приводом
Вращение ротора в шарикоподшипниках создается и поддерживается струей сжатого воздуха, направленной на рифленую поверхность обода. Внутренняя и наружная рамки карданова подвеса обеспечивают полную свободу вращения оси собственного вращения ротора. По шкале азимута, прикрепленной к наружной рамке, можно ввести любое значение азимута, выровняв ось собственного вращения ротора с основанием прибора. Трение в подшипниках столь незначительно, что после того как это значение азимута введено, ось вращения ротора сохраняет заданное положение в пространстве, и, пользуясь стрелкой, скрепленной с основанием, по шкале азимута можно контролировать поворот самолета. Показания поворота не обнаруживают никаких отклонений, если не считать эффектов дрейфа, связанных с несовершенствами механизма, и не требуют связи с внешними средствами навигации.
2.1 Применение гироскопов в технике
Свойства гироскопа используются в приборах — гироскопах, основной частью которых является быстро вращающийся ротор, который имеет несколько степеней свободы. Гироскопы, у которых центр масс совпадает с центром подвеса O, называются астатическими, в противном случае — статическими гироскопами. Для обеспечения вращения ротора гироскопа с высокой скоростью применяются специальные гиромоторы. Для управления гироскопом и снятия с него информации используются датчики угла и датчики момента. Гироскопы используются в виде компонентов как в системах навигации (авиагоризонт, гирокомпас), так и в системах ориентации и стабилизации космических аппаратов. При использовании в гировертикали показания гироскопа должны корректироваться маятником, так как из за суточного вращения земли и ухода гироскопа, происходит отклонение от истиной вертикали. Кроме того, в механических гироскопах может использоваться смещение его центра масс, которое эквивалентно непосредственному воздействию маятника на гироскоп.
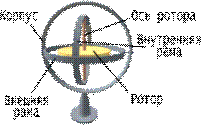
Рисунок 2.1. — Схема простейшего механического гироскопа в карданном подвесе
Большое применение находят гироскопические приборы для автоматического управления движением самолетов и кораблей. Для поддержания заданного курса корабля служит «авторулевой», а самолета — «автопилот»..В приборе «авторулевой» применен свободный гироскоп с большим собственным моментом импульса и малой силой трения в местах карданова подвеса. Направление движения корабля задается направлением оси свободного гироскопа. При любых отклонениях корабля от курса, ось гироскопа сохраняет свое прежнее пространственное направление, а карданов подвес поворачивается относительно корпуса корабля. Поворот рамы карданова подвеса отслеживается при помощи специальных устройств которые выдают команды автоматам на поворот руля и возвращение корабля на заданный курс.
Навигационные системы летательных аппаратов
... время основу навигационных систем беспилотных летательных аппаратов составляют приёмники глобальных систем спутниковой навигации (ГССН), компенсированные с ... грамм содержит все необходимое для автономной навигации: гироскопы, акселерометры и высокопроизводительное ядро с математическим ... автотранспорта и в системы стабилизации оборудования. Рисунок 2 Микро-БИНС (Бесплатформенная ...
«Автопилот» снабжен двумя гироскопами. У одного из них ось располагают вертикально и в таком положении раскручивают гироскоп. Вертикально расположенная ось гироскопа задает горизонтальную плоскость. Ось второго гироскопа располагают горизонтально, ориентируя ее вдоль оси самолета. Этот гироскоп постоянно «знает» курс самолета. Оба гироскопа дают соответствующие команды механизмам управления, поддерживающим полет самолета по заданному курсу. В настоящее время автопилотами оборудованы все современные самолеты, предназначенные для длительных полетов. Гироскоп служит важной составной частью в системах управления космических аппаратов.
Гироскопы применяют так же в системах навигации. Инерциальная навигация относится к такому способу определения местоположения в пространстве, при котором не используются данные каких-либо внешних источников. Все чувствительные элементы находятся непосредственно на борту транспортного средства. Инерциальные измерители линейных ускорений — акселерометры установлены на так называемой гиростабилизированной платформе. Эта платформа, используя свойства гироскопа — сохранять неизменной ориентацию своей оси в пространстве, обеспечивает строго горизонтальное положение осей чувствительности акселерометров. Измеренные ускорения дважды интегрируются, и, таким образом, получается информация о приращении местоположения подвижного объекта. Объединенные общей задачей определения координат подвижного объекта, гироскопы и акселерометры образуют инерциальную навигационную систему. Помимо этой задачи она поставляет информацию об угловой ориентации объекта: углах крена, тангажа и рыскания и о скорости объекта.
Другой класс — бесплатформенные отличаются тем, что плоскость горизонта в них реализована математически, используя данные гироскопов и акселерометров. В этих системах могут быть использованы лазерные и волоконно-оптические гироскопы. Здесь нет вращающихся частей, а об угловой скорости судят по фазовой задержке лазерного луча пробегающего по замкнутому контуру. Они существенно конструктивно проще и дешевле платформенных. Гироскоп чаще всего применяется как чувствительный элемент указывающих гироскопических приборов и как датчик угла поворота или угловой скорости для устройств автоматического управления. В некоторых случаях, например в гиростабилизаторах, гироскопы используются как генераторы момента силы или энергии.
2.2 Простейший гироскоп
Простейшим гироскопом является обыкновенный детский волчок, быстро вращающийся вокруг своей оси. Ось волчка может изменять своё положение в пространстве, поскольку её верхний конец не закреплен. У гироскопов применяемых в технике, свободный поворот оси можно обеспечить, закрепив её в рамках карданова подвеса, позволяющего оси волчка занять любое положение в пространстве. Такой гироскоп имеет три степени свободы. Свойства гироскопа проявляются при выполнении двух условий: ось вращения гироскопа должна иметь возможность изменять своё направление в пространстве, и угловая скорость вращения гироскопа вокруг своей оси должна быть очень велика по сравнению с той угловой скоростью, которую будет иметь сама ось при изменении своего направления.
Первое свойство гироскопа с тремя степенями свободы состоит в том, что его ось стремится устойчиво сохранять в мировом пространстве приданное ей первоначальное направление. Если эта ось вначале направлена на какую-нибудь звезду, то при любых перемещениях основания прибора и случайных толчках она будет продолжать указывать на эту звезду, меняя свою ориентировку относительно земных осей. Впервые это свойство гироскопа использовал французский учёный Л. Фуко для экспериментального доказательства вращения Земли вокруг её оси в 1852 г. Отсюда и само название «гироскоп», что в переводе означает «наблюдать вращение». Второе свойство гироскопа обнаруживается, когда на его ось начинают действовать сила или пара сил, стремящиеся привести ось в движение. Под действием силы конец оси гироскопа будет отклоняться в направлении, перпендикулярном к этой силе; в результате гироскоп вместе с рамкой начнёт вращаться вокруг оси, притом не ускоренно, а с постоянной угловой скоростью. Это вращение называется прецессией; оно происходит тем медленнее, чем быстрее вращается вокруг своей оси сам гироскоп. Если в какой-то момент времени действие силы прекратится, то одновременно прекратится прецессия и ось мгновенно остановится, т.е. прецессионное движение гироскопа безынерционно. Наряду с прецессией ось гироскопа при действии на неё силы может ещё совершать нутацию — небольшие, но быстрые, обычно незаметные на глаз, колебания оси около её среднего направления. Размахи этих колебаний у быстро вращающегося гироскопа очень малы и из-за наличия сопротивления и быстро затухают. Прецессионное движение можно наблюдать и у детского волчка.
Если ось такого волчка поставить под углом к вертикали и отпустить, то она под действием силы тяжести будет отклоняться в перпендикулярном направлении, и начинает прецессировать вокруг вертикали.
Прецессия волчка также сопровождается незаметными на глаз нутационными колебаниями, быстро затухающими из-за сопротивления воздуха. Под действием трения о воздух собственное вращение волчка постепенно замедляется, а скорость прецессии возрастает. Когда угловая скорость вращения волчка становится меньше определенной величины, он теряет устойчивость и падает.
У медленно вращающегося волчка нутационные колебания могут быть довольно заметными и, слагаясь с прецессией, изменять картину движения оси волчка: верхний конец оси будет описывать волнообразную или петлеобразную кривую.
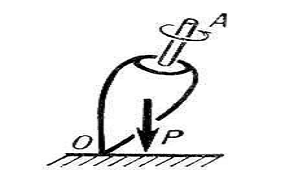
Рисунок 2.2. — Волчок
2.3 Системы стабилизации
Системы стабилизации бывают трех основных типов:
1. Система силовой стабилизации (на двухстепенных гироскопах).
Для стабилизации вокруг каждой оси нужен один гироскоп. Стабилизация осуществляется гироскопом и двигателем разгрузки, в начале действует гироскопический момент, а потом подключается двигатель разгрузки.
- Система индикаторно-силовой стабилизации (на двухстепенных гироскопах).
Для стабилизации вокруг каждой оси нужен один гироскоп. Стабилизация осуществляется только двигателями разгрузки, но в начале появляется небольшой гироскопический момент, которым можно пренебречь.
- Система индикаторной стабилизации (на трехстепенных гироскопах)
Для стабилизации вокруг двух осей нужен один гироскоп. Стабилизация осуществляется только двигателями разгрузки.
2.4 Новые типы гироскопов
Постоянно растущие требования к точностным и эксплуатационным характеристикам гиро-приборов заставили ученых и инженеров многих стран мира не только усовершенствовать классические гироскопы с вращающимся ротором, но и искать принципиально новые идеи, позволившие решить проблему создания чувствительных датчиков для измерения и отображения параметров углового движения объекта.
В настоящее время известно более ста различных явлений и физических принципов, которые позволяют решать гироскопические задачи. В США, ЕС, Японии, Украине и России выданы тысячи патентов и авторских свидетельств на соответствующие открытия и изобретения. Поскольку прецизионные гироскопы используются в системах наведения стратегических ракет большой дальности, во время холодной войны информация об исследованиях, проводимых в этой области, классифицировалась как секретная.

Рисунок 2.3. — Кольцевой лазерный гироскоп
2.5 Перспективы развития гироскопического приборостроения
В настоящее время разрабатывается система навигационных спутников третьего поколения. Она позволит определять координаты объектов на поверхности Земли с точностью до единиц сантиметров в дифференциальном режиме, при нахождении в зоне покрытия корректирующего сигнала DGPS. При этом якобы отпадает необходимость в использовании курсовых гироскопов. Например, установка на крыльях самолета двух приёмников спутниковых сигналов, позволяет получить информацию о повороте самолёта вокруг вертикальной оси.
Однако системы спутниковой навигационной системы оказываются неспособны точно определять положение в городских условиях, при плохой видимости спутников. Подобные проблемы обнаруживаются и в лесистой местности. Кроме того прохождение сигналов навигационной системы зависит от процессов в атмосфере, препятствий и переотражений сигналов. Автономные же гироскопические приборы работают в любом месте — под землёй, под водой, в космосе. В самолётах спутниковая навигационная система оказывается точнее инерциальную навигационную систему на длинных участках. Но использование двух спутниковых навигационных — приёмников для измерения углов наклона самолета даёт погрешности до нескольких градусов. Подсчёт курса путём определения скорости самолёта с помощью этой системы также не является достаточно точным. Поэтому, в современных навигационных системах оптимальным решением является комбинация спутниковых и гироскопических систем, называемая интегрированной системой.
Почти каждое морское судно дальнего плавания снабжено гирокомпасом для ручного или автоматического управления судном, некоторые оборудованы гиростабилизаторами. В системах управления огнем корабельной артиллерии много дополнительных гироскопов, обеспечивающих стабильную систему отсчета или измеряющих угловые скорости. Без гироскопов невозможно автоматическое управление торпедами. Самолеты и вертолеты оборудуются гироскопическими приборами, которые дают надежную информацию для систем стабилизации и навигации. К таким приборам относятся авиагоризонт, гировертикаль, гироскопический указатель крена и поворота. Гироскопы могут быть как указывающими приборами, так и датчиками автопилота. На многих самолетах предусматриваются гиростабилизированные магнитные компасы и другое оборудование — навигационные визиры, фотоаппараты с гироскопом, гиросекстанты. В военной авиации гироскопы применяются также в прицелах воздушной стрельбы и бомбометания.
Гироскопы разного назначения (навигационные, силовые) выпускаются разных типоразмеров в зависимости от условий работы и требуемой точности. В гироскопических приборах диаметр ротора составляет 4-20 (см), причем меньшее значение относится к авиационно-космическим приборам. Диаметры же роторов судовых гиростабилизаторов измеряются метрами.
1. Бороздин В.Н. Гироскопические приборы и устройства систем управления: учеб. пособие /В.Н. Бороздин.-Москва, 1990. -480 с.
2. Меркурьев И.В. /Динамика микромеханического и волнового твердотельного гироскопов./ И.В. Меркурьев; Подалков В.В. — М.: ФИЗМАТЛИТ, 2009. — 228 с.
- Гироскопические системы / под ред. Д.С. Пельпора. — М.: Высш. шк., 1986-1988.-564 с.
- Павловский М.А.
Теория гироскопов: учебник для ВУЗов/М.А. Павловский. — Киев, 1986.-78 с.
- Сивухин Д.В. Общий курс физики./В.Д. Сивухин. — М.: Физматлит, 2006. — 560 с.
- В.В.
Матвеев Основы построение бесплатформенных инерциальных навигационных систем. / В.В. Матвеев., В.Я. Распопова. — Москва 2009. — 280 с.
- Савельев И.В. Курс общей физики: Механика./И.В. Савельев. — М.: Астрель, 2004. — 336 с.
- Пельпор Д.С.
Гироскопические системы: Гироскопические приборы и системы. — 2-е изд./Д.С. Пельпор. — М.: Высшая школа, 1988. — 424 с.