
Металлорежущие станки являются распространенными производственными машинами, предназначенными для механической обработки заготовок из металла режущими инструментами. Путем снятия стружки заготовке предаются требуемая форма, размеры и чистота поверхности.
Станки токарной группы относятся к наиболее распространенным металлорежущим станкам и широко применяются на промышленных предприятиях, в ремонтных мастерских и т. п. В эту группу входят: универсальные токарные и токарно-винторезные, револьверные, токарно-лобовые, карусельные, токарно-копировальные станки, токарные автоматы и полуавтоматы.
По размерам токарные станки бывают настольными, средними станками нормальных размеров и уникальными.
По точности и чистоте обработки они разделяются на станки для грубой обработки, станки нормальной и повышенной точности.
Режущими инструментами на токарных станках служат в основном резцы, сверла, развертки, метчики, плашки.
Характерной особенностью станков токарной группы является осуществление главного движения за счет вращения обрабатываемой детали. Подача режущего инструмента производится путем поступательного перемещения суппортов.
Некоторый рост промышленного производства пробудил интерес предприятий к станкам с числовым программным управлением, однако интерес этот в значительной степени сдерживается высокой стоимостью такого оборудования и отсутствием средств у большей части отечественных производителей. Наиболее доступным решением проблемы является модернизация станков путем замены старой системы ЧПУ (числового программного управления) на современную.
Можно привести ряд аргументов, подтверждающих целесообразность именно такого подхода к решению проблемы:
- по своим темпам существенно превосходит прогресс механической состав-
ляющей (так, если производительность вычислительных систем и ёмкость запоминающих устройств выросли за последние 10 лет в сотни раз, то размеры рабочих зон, обороты двигателей и точность позиционирования остались практически неизменными);
- замена станка часто связана со значительными дополнительными капитальными вложениями, такими как демонтаж станины, демонтаж старых и монтаж новых гидравлических, пневматических и электрических коммуникаций;
— современное машиностроительное предприятие имеет практически неограниченные возможности по капитальному ремонту и даже улучшению состояния механических частей станков, в то время как ремонт электронных блоков с каждым годом становится всё более трудоёмким.
Проектирование участка механического цеха для обработки детали-представителя ...
... Тема дипломного проекта: спроектировать участок механического цеха для обработки детали - стакан подшипника Т50-1701253 с годовой программой выпуска участка - ... в машиностроении характеризуется созданием универсальных машин и станков с ЧПУ., непосредственно управляемых ЭВМ в режиме ... на которое необходимо иметь запас деталей для бесперебойной работы сборочного цеха: 2-3 дня для крупных деталей; ...
Замена системы ЧПУ по сравнению с приобретением нового металлообрабатывающего оборудования позволяет в 24 раза сократить расходы на модернизацию производства (чаще всего при одинаковом конечном результате).
Одновременно значительно сокращаются расходы на обслуживание станков за счет радикального уменьшения номенклатуры обслуживаемых систем, унификации процедуры подготовки и отладки управляющих программ и автоматизации поиска неисправностей.
Целью модернизации является:
- повышение надежности;
- повышение
- повышение экономичности;
- повышение безопасности.
Основные возможные направления модернизации электрооборудования станка:
- использование комплектных электроприводов;
- использование бесконтактных блоков управления;
- использование современных конструкций двигателей и оборудования.
В данном дипломном проекте мною была выполнена модернизация электро-
оборудования и схемы управления токарного станка 7800ИТФ3 с заменой устаревшей системы ЧПУ на современную NC-202, производства компании «Балт- Систем», а так же заменой преобразователей и двигателей постоянного тока координат X и Z на сервопривода.
1. Назначение и технические данные станка
Токарный станок с УЧПУ модели 7800ИТФ3 предназначен для токарной обработки детали 6П20.3-2-«Шток».
Класс точности модуля П по ГОСТ 8-82.
Климатическое исполнение модуля УХЛ 4.1 ГОСТ 15150-69.
Таблица 1
Основные технические данные и характеристики станка.
|
Наименование характеристики |
Значение |
|
Класс точности станка по ГОСТ 8-82 |
П |
|
Отверстие в шпинделе передней бабки по ГОСТ 25557-82 |
Морзе 5 |
|
Конец шпинделя фланцевого по ГОСТ 12593-85 |
2-4К |
|
Дискретность задания перемещения суппорта, мкм по координате X по координате Z |
1 2 |
|
Точность линейного позиционирования суппорта вдоль основных осей координат при одностороннем подходе к заданным позициям, мкм — допускаемое накопленное отклонение от заданного перемещения: по координате X по координате Z |
16 20 |
|
— допускаемое среднее квадратичное отклонение (стабильность),мкм: по координате X по координате Z |
1,2 3 |
|
Частота вращения шпинделя, об/мин: |
2000 |
|
Пределы рабочих подач суппорта, мм/мин: по координате X по координате Z |
1,5-1800 3-3600 |
Таблица 2
Техническая характеристика электрооборудования станка.
|
Наименование характеристики |
Значение |
|
Род тока питающей сети |
Переменный трехфазный |
|
Частота тока, Гц |
50 |
|
Напряжение, В |
380 |
|
Продолжение таблицы 2 |
|
|
Наименования характеристики |
Значение |
|
Количество электродвигателей на станке, шт. В том числе: |
8 |
|
Электродвигатель главного движения тип количество, шт. мощность, кВт частота вращения, номинальная, об/мин |
АИР132М 8/4.У3 1 5/7,5 715/1430 |
|
Электродвигатель продольной подачи тип количество, шт. мощность, кВт частота вращения, номинальная, об/мин |
ВЭМ110УХЛ41 1 5,6 6000 |
|
Электродвигатель поперечной подачи тип количество, шт. мощность, кВт частота вращения, номинальная, об/мин |
ВЭМ110УХЛ41 1 5,6 6000 |
|
Электродвигатель станции смазки подшипников передней бабки тип количество, шт. мощность, кВт частота вращения, об/мин |
АИС56 В4 У3 1 0,09 1310 |
|
Электродвигатель привода насоса охлаждения П50 М количество, шт. мощность, кВт частота вращения, об/мин |
1 0,18 3000 |
|
Электродвигатель револьверной головки тип количество, шт. мощность, кВт частота вращения, об/мин |
АИР56 В4 У3 1 0,18 1365 |
|
Электродвигатель привода транспортера стружки тип количество, шт. мощность, кВт частота вращения, об/мин |
АИР63 В4 У3 1 0,37 1365 |
|
Электродвигатель периодической системы смазки тип количество, шт. мощность, кВт частота вращения синхронная, об/мин |
АИР50А2У3 1 0,09 3000 |
|
Окончание таблицы 2 |
|
|
Суммарная мощность всех электродвигателей, кВт |
11,21 |
|
Степень защиты: шкафа электрооборудования пульта управления |
1Р44 1Р44 |
2. Устройство, работа станка и его составных частей
Общий вид с обозначением узлов станка 7800ИТФ3 изображен на листе1 графической части дипломного проекта.
На литой чугунной тумбе (поз.1) закреплена литая чугунная станина.
В левой части в нише тумбы, установлен электронасос подачи СОЖ, нижняя часть тумбы является баком для СОЖ. С правого торца в этой же нише (выше емкости для СОЖ) устанавливается шнековый транспортер для уборки стружки (поз. 10).
Под транспортером стружки, справа от тумбы, устанавливается тележка (поз.16) под
Двигатель главного движения (поз.14) расположен в полости тумбы с левой стороны и установлен на плите, закрепленной на вертикальной стенке тумбы, и имеет возможность перемещения в вертикальной плоскости для натяжения клиновых ремней. На левом торце тумбы закреплено на кронштейнах пневмооборудование (поз. 7).
С задней стороны тумбы в нишах слева направо расположены (поз. 9):
- станция смазки подшипников передней бабки;
- централизованная система смазки.
На левом конце станины крепится передняя бабка (поз.13).
На наклонных стальных направляющих станины перемещается продольный суппорт (поз. 4).
По поперечным направляющим (типа «ласточкин хвост») суппорта перемещается поперечная каретка. На верхней плоскости каретки закреплена револьверная головка. Револьверная головка (поз. 15) предназначена для автоматической смены режущего инструмента, установленного в гнезда четырёхпозиционного инструментального диска. На вертикальных направляющих станины в правой части установлена задняя бабка (поз.2).
На фланце шпинделя передней бабки закрепляется механизированный трех
кулачковый клиновой патрон. На шкиве, закрепленном на левом концешпинделя, крепится вращающийся пневмо цилиндр привода клинового патрона.
Привод продольных подач (поз.3)состоит из двигателя постоянного тока и передачи Винт-Гайка Качения (в дальнейшем по тексту передачи ВГК).
Двигатель установлен на корпусе, закрепленном на правом торце станины. Передача ВГК располагается в нише станины между продольными направляющими. Корпус передачи ВГК крепится к нижней плоскости продольного суппорта. Левая опора передачи ВГК крепится в левой части ниши станины, а правая в корпусе, закрепленном к правому торцу станины. Двигатель соединен с винтом передачи ВГК на прямую с помощью сильфонной муфты. В корпусе установлен механизм для ручного перемещения продольного суппорта с помощью рукоятки.
Привод поперечных подач (поз.5)состоит из двигателя постоянного тока и передачи ВГК. Двигатель закреплен на верхнем торце корпуса привода, закрепленного к верхнему торцу продольного суппорта. Передача ВГК располагается в нише продольного суппорта, корпус передачи ВГК крепится к нижней плоскости поперечной каретки. Передняя опора передачи ВГК крепится в нижней части ниши продольного суппорта, а верхняя в корпусе, закрепленном к верхнему торцу продольного суппорта. Двигатель соединен с винтом передачи ВГК на прямую с помощью сильфонной муфты. В нижней части продольного суппорта на конце винта передачи ВГК имеется квадрат под ключ для ручного перемещения поперечной каретки.
Первый блок путевых микро выключателей (поз.17) служит для контроля перемещения продольного суппорта по направляющим станины. Блок, внутри которого размещены четыре конечных выключателя, закреплен на кронштейне, который закреплен на верхней крышке корпуса привода продольных подач. На правом крыле продольного суппорта расположена планка с упорами, которые при движении суппорта воздействуют на конечные выключатели блока.
Второй блок путевых микро выключателей служит для контроля перемещения поперечной каретки по направляющим «ласточкин хвост» продольного су-
, закреплен на кронштейне на правой верхней плоскости продольного суппорта.
На правом торце поперечной каретки расположена планка с упорами, которые придвижении каретки воздействуют на конечные выключатели блока.
Для защиты обслуживающего персонала от вращающихся и движущихся частей модуля, а также от разлетающейся стружки, станок оснащен передним подвижным ограждением (поз.11) Ограждение всего станка – кабинетного типа.
Электрошкаф (поз.12) установлен на тумбе с задней стороны станка.
3. Порядок работы электрооборудования станка до модернизации
Элетрооборудование обеспечивает работу станка во всех режимах, которые заложены в УЧПУ «МАЯК-223МП»:
- ручной;
- выход в ноль;
- отдельный кадр (управление станком по командам, вводимым на панели управления);
- автоматический.
Вводной выключатель QF1 установить в положение ВКЛЮЧЕНО. Для этого необходимо вставить ключ (поставляемый в комплекте со станком) в гнездо замка запирающего устройства и повернуть на 180 0 по часовой стрелке, после чего установить рукоятку в положение ВКЛЮЧЕНО. На боковой стенке электрошкафа должна включиться сигнальная лампа СЕТЬ (HL1).
Нажатием кнопки SВ2 на станочном пульте включить систему УЧПУ. После прохождения теста на пульте управления модуля загорится светодиод VD1.
Управление пневмопатроном:
Управление пневмопатроном возможно в ручном режиме от пульта управления станка.
При нажатии кнопки зажима SA9, срабатывает реле К16 замыкает свой контакт в цепи питания электромагнита YA2, подводится пиноль и в переднем положении пиноли срабатывает реле К18, производится зажим кулачков патрона
YA4. В автоматическом режиме, управление пневмопатроном (зажим детали
осуществляется по командам системы ЧПУ.
Выполнение этих команд возможно только в том случае, если шпиндель остановлен.
Поворот револьверной головки:
Команда поворота с ЧПУ поступает на пускатель КМ8 или КМ9. Головка поворачивается электродвигателем М5. После поворота и посадки головки происходит торможение двигателя пускателем КТ.
Поворот револьверной головки в позицию, заданную и контролируемую с помощью датчиков SQ13…SQ15 и SQ12,SQ16 (контроль четности и посадки) останавливается после каждого нажатия.
Управление перемещениями по координатам:
В режиме выхода в ноль необходимо произвести привязку осей станка к нулевой точке. При этом выход суппорта и каретки в нулевое положение выполняется по координатам Х и Z соответственно с помощью конечных выключателей SQ3 и SQ8.
Задание величины и скорости перемещений суппорта и каретки осуществляется с УЧПУ.
Максимальные перемещения по осям ограничены конечными выключателями ограничения перемещений:SQ4, SQ5, SQ9, SQ10. При наезде на них подача прекращается, на ПО ЧПУ индицируется сообщение. Съезд с этих конечников выполняется заданием с ПО перемещения в направлении противоположном наезду.
Перемещение осей при помощи штурвала:
Для ручного перемещения осей на пульте модуля установлен штурвал (маховичок).
При повороте штурвала на одно деление ось переместится на расстояние, равное заранее заданному числу. В зависимости от направления вращения, выбранная ось перемещается в положительном и отрицательном направлении.
Управление частотой вращения шпинделя:
В качестве привода шпинделя установлен двух скоростной асинхронный двигатель. Управление скоростью двигателя производится пускателями КМ1, КМ2, КМ3. Выбор скорости возможен в наладочном режиме с пульта управления или от УЧПУ (1 скорость 750 об/мин, 2 скорость 1500 об/мин).
Индикация скорости вращения шпинделя осуществляется на экране УЧПУ.
При выполнении резьбонарезания синхронизация подачи и вращения производится с помощью фотоэлектрического преобразователя круговых перемещений В1 через УЧПУ.
4. Схема управления и ее элементы до модернизации
Технические данные элементов схемы сводим в таблицу 3
Таблица 3
Технические данные элементов схемы.
|
Обозначение |
Наименование |
Кол-во |
Примечание |
|
А1 |
УЧПУ «Маяк-223МП» ТУ3-129М-87 с дополнительной платой БВВ 48/32 и блоком микроинтерполятора ПВС.5.422.008-01 Приводы подач ИТ42.97.000 |
1 |
|
|
А2 |
Блок питания DRA 120-24 24 B, 5 A |
1 |
|
|
А3 |
Блок диодов 755ИТ.90.01.000 |
1 |
|
|
А4 |
Блок контроля вращения СТА500Ф3.91.07.000 |
1 |
|
|
В1 |
Преобразователь угловыхперемещени ЛИР-601А.000ПС1 (5 В) z=10 Трасса РС10-4-Р-0 (L=4м) |
1 1 |
|
|
Элемент для подавления помех RC1…RC15 |
|||
|
RC1/R1…RC15/R15 |
Резистор МЛТ-2.100 Ом +-10%ОЖО467.180ТУ |
15 |
|
|
RC1/C1…RC15/C15 |
Конденсатор К73-17-400-0,47 мКф +-10%ОЖО.461.104ТУ |
15 |
|
|
Элемент для подавления помех эл. двигателейRC-M1/1,RC-M1/2,RC-M2…RC-M6 |
|||
|
R1-R3 |
Резистор МЛТ-2.270 Ом+-10%ОЖО467.180ТУ |
21 |
|
|
C1-C3 |
Конденсатор К73-17-630-0,22 мКф+-10% |
21 |
|
|
HL1 |
Лампа КМ24-90 ТУ16-88 ИКАВ.675.250.001ТУ с арматурой АМЕ-325221У2 (Белая) ТУ16-535.582-76 |
1 |
|
|
HL2 |
Cветильник ПСх60-002 с лампой МО24-60 ТУ16-87ИЖУЦ.675316.001ТУ |
1 |
|
|
K1,K10-K25 |
Реле промежуточное РЭП-26-003А521046-40Х4 24 В |
17 |
|
|
FP1, FP7 |
Реле электротепловое РТЛ-1021 04 (13-19 А) ТУ16-523.549-82 c клемником КРЛ-1 04 |
2 |
Iуст. FP1=15,6 A FP7=13,3 A |
|
Продолжение таблицы 3 |
|||
|
Обозначение |
Наименование |
Кол-во |
Примечание |
|
FP2, FP4 FP5, FP6 |
Реле электротепловое РТЛ-1005 04 (0,6-1,0 А) ТУ16-523.549-82 c клемником КРЛ-1 04 |
4 |
Iуст.=0,63 A FP4=0,8 A |
|
FP3 |
Реле электротепловое РТЛ-1006 04 (0,95-1,6 А) ТУ16-523.549-82 c клемником КРЛ-1 04 |
1 |
Iуст=1,25 А |
|
KM1, KM2 |
Пускатель ПМ12-025100УХЛ4Б 110 В, 50 Гц С приставкой ПКЛ-22 М04 (2з+2р) ТУ16-89 ИГФР.644236.033ТУ |
2 |
|
|
KM4 |
Пускатель ПМ12-025100УХЛ4Б 110 В, 50 Гц С приставкой ПКЛ-40 М04 (4з) ТУ16-89 ИГФР.644236.033ТУ |
1 |
|
|
KM3, KM5-KM7 |
Пускатель ПМ12-025100УХЛ4Б 110 В, 50 Гц ТУ16-89 ИГФР.644236.033ТУ |
4 |
|
|
KM8, KM9 |
Пускатель ПМ12-025100УХЛ4Б 110 В, 50 Гц С приставкой ПКЛ-22 М04 (2з+2р) ТУ1 6-89ИГФР.644236.033ТУ |
2 |
|
|
KT |
Пускатель ПМ12-025101УХЛ4Б 110 В, 50 Гц С приставкой ПКЛ-22 М04 (4з) ТУ1 6-89ИГФР.644236.033ТУ |
1 |
|
|
M1 |
Электродвигатель АИР132М IM1001-У3 8/4 5/7,5 кВт, 715/1430 об/мин |
1 |
Iном=13,3/15,6 А |
|
M2 |
Электродвигатель станции смазкиАИР50А2N3 0,09 кВт, 1500 об/мин, 380 В, 50 Гц |
1 |
|
|
M3 |
Электродвигатель транспортера 4А63В4У3 0,37 кВт, 1500 об/мин, 380 В, 50 Гц |
1 |
Iном=1,25 А |
|
M4 |
Электродвигатель насоса охлаждения П-50М 0,18 кВт, 3000 об/мин, , 380 В, 50 Гц |
1 |
Iном=0,8 А |
|
M5 |
Электродвигатель револьверной головки 4АА56В4У3 0,18 кВт, 1500 об/мин, 380 В, 50 Гц |
1 |
Iном=0,63 А |
|
M6 |
Электродвигатель маслонасоса смазки шпинделяАИР50А2N3 0,09 кВт, 1500 об/мин, 380 В, 50 Гц |
1 |
Iном=0,63 А |
|
Mx, Mz |
Двигатель постоянного тока ВЭМ110УХЛ4 |
2 |
Iном=4,1 А |
|
QF1 |
Выключатель АЕ-2043МП-100-00У3-А; 660 В; 40 А; 50 Гц; 12Iном; ТУ16-522.148-80 |
1 |
|
|
QF2, QF5 |
Выключатель двухполюсныйВМ40-2ХС04-УХЛ3 ТУ 3421-003-05758109-9650 Гц, 4 А |
2 |
|
|
QF3, QF8, QF11 |
Выключатель однополюсныйВМ40-1ХС06-УХЛ3 ТУ 3421-003-05758109-9650 Гц, 6 А |
3 |
|
|
QF12 |
Выключатель однополюсныйВМ40-1ХС08-УХЛ3 ТУ 3421-003-05758109-9650 Гц, 8 А |
1 |
|
|
Продолжение таблицы 3 |
|||
|
Обозначение |
Наименование |
Кол-во |
Примечание |
|
QF4 |
Выключатель однополюсныйВМ40-1ХС02-УХЛ3 ТУ 3421-003-05758109-9650 Гц, 2 А |
1 |
|
|
QF6,QF9 |
Выключатель однополюсныйВМ40-1ХС04-УХЛ3 ТУ 3421-003-05758109-9650 Гц, 4 А |
2 |
|
|
QF10 |
ВМ40-1ХС02-УХЛ3 ТУ 3421-003-05758109-96 |
1 |
380 В; 2,0 А(1 пол.) |
|
QF7 |
Выключатель ВА51-25-320010000УХЛ3; 660 В; 6,3 А; 50 Гц; 10Iном ; ТУ16-522.157-83 |
1 |
|
|
QFS |
Выключатель ВА51-25-320010000УХЛ3; 660 В; 16 А; 50 Гц; 10Iном ; ТУ16-522.148-80 |
1 |
|
|
SL |
Датчик контроля уровня масла |
1 |
Из состава станции cмазки |
|
SC |
Датчик засорения фильтра |
1 |
Из состава станции cмазки |
|
SP1-SP7 |
Датчик реле давления РМ11-NA |
7 |
|
|
SA1,SA5,SA6 |
Тумблер ТП1-2 УСО.360.002ТУ |
3 |
|
|
SA2-SA4 SA7-SA9 |
Переключатель П2Т-5 ВТО.360.002ТУ |
5 |
|
|
SB1 |
Выключатель КЕ201У2 исп.2 Красный, «С» ТУ16-642.015-84 |
1 |
|
|
SB2, SB7 |
Выключатель КМЕ4521У2 Черный, «С» ТУ16-526.094-78 |
2 |
|
|
SB3 |
Выключатель КМЕ4511У2 Зеленый, «С» ТУ16-526.094-78 |
1 |
|
|
SB4 |
Выключатель КМЕ4511У2 Красный, «С» ТУ16-526.094-78 |
1 |
|
|
SB5 |
Выключатель КМЕ4511У2 Желтый, «С» ТУ16-526.094-78 |
1 |
|
|
SB6 |
КМЕ4511У2 Черный, «С»ТУ16-526.094-78 |
1 |
|
|
SQ1-SQ4 SQ5-SQ8 |
Блок БПМ21-046-55У3 ТУ16-526.334-74 |
2 |
|
|
SQ9, SQ16 |
Выключатель путевой ВП15К-21А211-54У2 ТУ16-526.470-80 |
2 |
|
|
SQ10-SQ15 |
Выключатель бесконтактный ВБИ-М12-60С-1111-3 (РНР, Н.О., S=4 мм.) |
6 |
|
|
TV1 |
Трансформатор ОСМ1-0,25У3, 380/5-220/24 В ТУ16-717.137-83 |
1 |
|
|
Окончание таблицы 3 |
|||
|
Обозначение |
Наименование |
Кол-во |
Примечание |
|
TV2 |
Трансформатор ОСМ1-0,4У3, 380/5-22-110/24 В ТУ16-717.137-83 |
1 |
|
|
VD10, VD11 |
Диод Д112-25-8У2 (Без охладителя) с деталями крепления ТУ16-526.470-80 |
2 |
|
|
YA1-YA6 |
Электромагниты золотников 110 В, 50 Гц. |
6 |
|
|
XS1 |
Розетка РА6,3-001К УХЛ2, 220 В, 6,5 А |
1 |
|
|
XS2, XS3 |
Розетка РА16-003 К |
2 |
220 В, 16А |
|
X20 |
Вилка ОНЦ-РГ-09-19/24-В1 бРО.364.082Ту |
1 |
|
|
Розетка ОНЦ-РГ-09-19/24-Р12-О бРО.364.082ТУ |
1 |
||
5.Анализ системы электропривода и схемы управления
Питание электрооборудования осуществляется от сети трехфазного пере-
менного тока системы TN (система питания с заземленной нейтралью и защитным проводом РЕ, подсоединенным к точке заземления системы питания).
Напряжение питания 380 В, частота 50 Гц.
Питание цепей электрооборудования осуществляется следующими напряжениями:
- электродвигатели переменного тока, трансформаторы – 380 В, 50 Гц;
- цепи управления переменного тока –110 В, 50 Гц;
- электродвигатели подачи- 325 В, 50 Гц;
- цепи управления постоянного тока — =24 В;
- цепи освещения – ~24 В, 50 Гц.
- цепи сигнализации ~24 В, 50 Гц.
- система УЧПУ «МАЯК-223МП»-~380 В, 50 Гц.
Основные технические характеристики УЧПУ
- управление контурное
- число управляемых координат 2
- интерполяция линейная круговая
- дискретность задания перемещений мм. Х(на радиус) 0,001
Z 0,002
- ускоренный ход мм/мин. Х до 3*
Z до 5*
- ввод программы с клавиатуры пульта или с дисковода.
«МАЯК-223МП» состоит из следующих компонентов:
- блок управления;
- пульт оператора;
- комплект кабелей;
- привода подач ИТ42.97.000
- комплект эксплуатационной документации.
Подключаемые компоненты:
- исполнительные электродвигатели и электромагниты.
Таблица 4
Паспортные данные электродвигателей.
|
Привод |
Тип |
Мощность или момент |
Номиналь- ная частота вращения, об/мин |
Напря- жение, В |
Испол-нение |
|
Шпинделя |
АИР132М |
5/7,5кВТ |
750/1430 |
220/380 |
IM1001-У3 |
|
Подач: ось Х ось Z |
ВЭМ110УХЛ4 ВЭМ110УХЛ4 |
15, Hm 15, Hm |
540 540 |
325 325 |
IМВ5 IМВ5 |
|
Транспортер |
4А63В4У3 |
0,37 кВт |
1500 |
220/380 |
IМВ5 |
|
Насоса СОЖ |
П-50М |
0,18кВТ |
3000 |
380 |
IM3681 |
|
Револьвер- ной головки |
4АА56В4У3 |
0,18 кВт |
1500 |
380 |
IМ3681 |
|
Смазочной станции, маслонасос |
АИР50А2N3 |
0,09 Квт |
1500 |
380 |
IM3681 |
Двигатель главного движения расположен внутри тумбы. Асинхронные двигатели насоса смазки и охлаждения установлены в тумбе модуля.
Электродвигатели поворота резцедержки, приводов подач установлены на соответствующих механизмах.
Электродвигатели установленные на станке, находятся в хорошем состоянии и в замене не нуждаются (кроме двигателей координат).
Необходимая скорость вращения двигателя М1 главного привода задается установкой переключателя SA3 в положение 1 –первая, малая скорость, или в положение 2 –вторая скорость.
На соответствующих механизмах установлены следующие конечные выключатели:
- аварийного отключения по координатам ²Х²и²Z²;
- ограничения перемещения по координатам ²Х²и²Z²;
- зоны выхода в ²0² по координатам ²Х²и²Z²;
- контроля позиции и посадки
- управление кулачками патрона;
- контроля ограждения;
- контроля уровня масла в системе дозированной смазки;
- контроля загрязнения фильтра системы дозированной смазки.
Релейно-контакторная схема, используемая для управления станком7800ИТФ3, обладает следующими недостатками:
- низкая надежность;
низкое
большая потребляемая мощность;
- большие габариты схемы;
- затраты энергии на срабатывание;
- при длительном хранении катушки реле стареют.
Контакты реле и пускателей изнашиваются, в них возникает искрение, что может привести к возникновению пожара.
Тепловые реле, используемые для защиты электродвигателей от перегрузки устарели и не могут обеспечить надежную защиту.
Понижающий трансформатор используемый для питания цепей управления и местного освещения уже устарел, нуждается в замене.Он потребляет большую мощность при низком коэффициенте полезного действия.
Установленные автоматические выключатели устарели и не отвечают требованиям безопасности.Они нуждаются в замене на более современные с луч —
шими характеристиками
Ввод питающих проводов осуществляется в электрошкаф через угольник с резьбой G. Подключение осуществляется через автоматический выключатель QF, установленный на боковой стенке электрошкафа.
Органы управления расположены:
- на пульте оператора «МАЯК-223МП»;
- на рабочем пульте.
В связи с указанными недостатками возникает необходимость модернизации станка 7800ИТФ3.
Применив более новое оборудование повыситься КПДстанка, снизятся габариты и вес, уменьшаться затраты и повысится производительность труда.
6. Предложения по модернизации
В процессе анализа привода подачи, выявлены следующие недостатки: электропривода подач имеют износ до 85%, ремонту не подлежат по причине и снятия с производства; станок снабжен устаревшей системой УЧПУ, которая практически не работоспособна по причине износа и отсутствия запчастей вследствие снятия с производства. Кроме того, обнаружены многочисленные обрывы электрических кабелей вследствие старения и потери гибкости. Производимый плановый ремонт не устраняет всех недостатков станка, так как система нуждается в полной замене, а частые поломки приносят большие материальные затраты.
Чтобы устранить указанные недостатки и повысить технические параметры станка по нормам точности необходимо произвести модернизацию электрооборудования станка. Для сокращения сроков модернизации, упрощения послеремонтного обслуживания модернизированной СУ целесообразно применение современного оборудования и программного обеспечения компании «Балт-Систем» Санкт-Петербург.
В данном процессе модернизации целесообразно применить оборудование, которое имеет комплектную поставку и легко монтируется на объект модернизации, менее квалифицированным персоналом. Таким образом, остановим свой выбор на системе NC-202, которая имеет в комплекте все необходимые элементы для системы автоматического управления. В комплект входят, входной модуль NC-201-402 и релейный модуль NC-210-401. Главным звеном системы управления выступает система УЧПУ.
Таким образом, при комплектной поставке упрощается процесс комплектного заказа и поставки. При использовании всех комплектующих одной фирмы
сокращаются сроки модернизации, а следовательно и затраты на проведение работ. Высокое качество современного оборудования увеличивает фонд рабочего времени и сокращает время простоя, что значительно повышает экономический эффект от использования станка с таким оборудованием. С повышением точности значительно повышается качество обработки с получистовой до чистовой. Итогом этого является уменьшение затрат на изготовление, а также рост рыночной стоимости готовой продукции на данном оборудовании. Электродвигатели, установленные на станке (кроме координатных), находятся в хорошем состоянии и в замене не нуждаются, проведём профилактические работы.
Применяем современные конструкции аппаратов управления и защиты. Они обладают более высокой надежностью, меньшим шумом в работе и меньшими габаритами и массой.
7. Разработка схемы управления и описание её работы
Разработку схемы управления станка модели 7800ИТФ3 ведем согласно с предложениями по модернизации. Схема электрическая принципиальная после модернизации представлена на листах 5, 6 графической части проекта.
Перед первым включение станка необходимо включит следующие автоматические выключатели в электрошкафу: QF2…QF4, QF6… QF12.
Включить автоматический выключатель QF1, на ЧПУ повернуть кнопку «АВАРИЙНЫЙ ОСТАНОВ» по направлению, указанному на кнопке до щелчка, повернуть ключ «POWER» в позицию «ON», при этом будет подано напряжение в УЧПУ. После появления на экране видеостраницы #1 система готова к включению управляющего напряжения на вспомогательные механизмы станка.
Перед запуском УП необходимо включить внутреннее реле УЧПУ «SPEPN», через него поступает управляющее напряжение станка и сигнал «Готовность». Это можно сделать включение определённой команды в УП, либо запрограммировать отдельную кнопку на системе УЧПУ.
Бесконтактный выключатель SQ3 нажатый, пиноль разжата. Нажаты конечные выключатели SQ9, SQ12, что соответствует положению координат в «0».
Для зажатия детали в патроне необходимо нажать кнопку на УЧПУ «Зажим патрона», управляющий сигнал с УЧПУ поступает на релейный модуль, включается YA2, для разжатия необходимо нажать на кнопку «Разжим патрона», сработает YA1. Подвод (отвод пиноли) происходит так же, по нажатию соответствующих кнопок, сработают электромагниты YA4(YA3).
Контроль состояния пиноли контролируется бесконтактными датчиками SQ2, SQ3, так же осуществляется контроль зажима пиноли, реле давления SP6.
Для запуска УП на выполнение необходимо выполнить следующие действия:
1) вызвать УП, введя с клавиатуры команду: SPG,PROG1 — нажать клавишу «ENTER»; при этом выбирается программа PROG1,которая находится в памяти;
2) выбрать режим работы «АВТОМАТИЧЕСКИЙ» («AUTO») или «КАДР»
(«STEP») нажатием клавиши «АВТОМАТИЧЕСКИЙ» или «КАДР»;
3) нажать клавишу «ПУСК».
Если выполнение УП осуществляется в режиме «КАДР» («STEP»),необходимо нажимать клавишу «ПУСК» для обработки каждого кадра.
Команда: ESE, N — данная до начала цикла обработки, позволяет выполнить только часть УП до установленного номера кадра.
Включаются контакторы КМ1, КМ3, КМ4, их контакты замыкаются и включаются электродвигатели М2, М4, М5. Подачей сигнала с УЧПУ на привода главного движения А7 и приводов координат А5, А6 происходит запуск двигателей М1, Mx иMz. Происходит съезд с конечных выключателей SQ9, SQ12 и их размыкание. В зависимости от направления вращения РГ (револьверная головка) происходит срабатывание контактора КМ5 или КМ6, замыкая свои контакты они приводят в движение двигатель М6. При срабатывании КМ5, нормально закрытый контакт размыкает цепь питания КМ6 и наоборот, исключая одновременное включение. Контроль позиции инструмента осуществляется бесконтактными выключателями SQ5 …SQ8, контроль посадки РГ выключателем SQ4. Срабатывает КМ2, замыкает свои контакты включая двигатель М3. Отключаются все двигатели, на системе УЧПУ выдаться сообщение о конце обработки детали.
В схеме предусмотрена защита от перегрева двигателей М2 … М6. При срабатывании тепловых реле FP1 … FP5, происходит размыкание цепи питания контактора включающего двигатель и подаётся сигнал на модуль входов А3.
8. Выбор системы управления УЧПУ типа NC
Новейшие достижения в области микроэлектроники позволили создать современные надежные устройства УЧПУ серий NC-110 и NC-2хх, обеспечивающие управление широким спектром промышленного оборудования. Устройства применяются станкозаводами России и стран СНГ, предприятиями судостроительной, автомобильной, авиационной, деревообрабатывающей и других отраслей промышленности. Одновременно с проектированием и внедрением в производство устройств УЧПУ особое внимание уделяется развитию версий программного управления. Разработка дополнительных программных функций по конкретным требованиям позволяет улучшить характеристики станков, повысить точность при обработке разнообразных профилей и обеспечить целостность детали и
NC-201M
Высокотехнологичное устройство УЧПУ с использованием современных компьютерных технологий для комплексных и высокопроизводительных решений управления станками токарной и фрезерной групп с количеством входов выходов не более 48/32.
Основные характеристики:
- Дисплей: 10,4″
- Корректоры: F%, S%, JOG
- Герметизированная кнопочная клавиатура
- Кнопки: «ПУСК», «СТОП»
- Функциональная клавиатура для реализации станочного пульта
- Стандартное фрезерно-токарное программное обеспечение
- Вх/вых: 48/32
- Канал FDD, RS-232, Ethernet, USВ
- СетеваяподдержкаLAN (Ethernet)
- НакопительUSB: 128Мб
- КабелиFDD, USB-FLASH
- Эмулятор УЧПУ для PC
- Габариты: 438х328х142

Рис. 1 – Внешний вид NC-201M
NC-202
Моноблочное, одноплатное УЧПУ NC202, в котором объединены в единое целое блок управления, пульт оператора, станочный пульт и программное обеспечение с высокой степенью функциональности. Эти качества устройств УЧПУ в сочетании с низкой ценой позволяют эффективно использовать их для управления токарными станками укомплектованными цифровыми и шаговыми приводами (в т.ч. для управления ШД-5).
Основные характеристики:
- Дисплей: 10,4″
- Корректоры: F%, S%, MODE
- Герметизированная кнопочная клавиатура
- Кнопки: «ПУСК», «СТОП»
- Кнопка аварийного выключения (Грибок)
- Функциональная клавиатура для реализации станочного пульта
- Стандартное фрезерно-токарное программное обеспечение
- ЦАП: 1 канал
- ЦИП: 3 канала
- Датчиков (ФИД): 3 канала
- Вх/вых: 40/24
- Канал FDD, RS-232, Ethernet, USВ
- Сетевая поддержка LAN (Ethernet)
- Накопитель USB: 128Мб
- Кабели FDD, USB-FLASH
- Эмулятор УЧПУ для PC
- Габариты: 432х322х105

Рис. 2 – Внешний вид NC-202
NC-210
Компактное модульное устройство УЧПУ NC-210, в котором объединены в единое целое блок управления, пульт оператора, станочный пульт и программное обеспечение с высокой степенью функциональности. Эти качества устройств УЧПУ в сочетании с низкой ценой позволяют эффективно использовать их для
управления токарными, фрезерными, лазерными, газоплазменными и другим ти-
пами станков.
Основные характеристики:
- Дисплей: 10,4″
- Корректоры: F%, S%, MODE
- Герметизированная кнопочная клавиатура
- Кнопки: «ПУСК», «СТОП»
- Кнопка аварийного выключения (Грибок)
- Функциональная клавиатура для реализации станочного пульта
- Стандартное фрезерно-токарное программное обеспечение
- Вх/вых: 64/48
- Канал FDD, RS-232, Ethernet, USВ
- Сетевая поддержка LAN (Ethernet)
- Накопитель USB: 128Мб
- Кабели FDD, USB-FLASH
- Эмулятор УЧПУ для PC
- Габариты: 439х340х140
Рис. 3 – Внешний вид NC-210
Компактное модульное устройство УЧПУ NC-220, в котором объединены в единое целое блок управления, пульт оператора, станочный пульт и программное обеспечение с высокой степенью функциональности. Эти качества устройств УЧПУ в сочетании с низкой ценой позволяют эффективно использовать их для управления токарными, фрезерными, лазерными, газоплазменными и другими типами станков укомплектованными цифровыми и шаговыми приводами (в т.ч. для управления ШД-5).
Основные характеристики:
- Дисплей: 10,4″
- Корректоры: F%, S%, MODE
- Герметизированная кнопочная клавиатура
- Кнопки: «ПУСК», «СТОП»
- Кнопка аварийного выключения (Грибок)
- Функциональная клавиатура для реализации станочного пульта
- Стандартное фрезерно-токарное программное обеспечение
- Вх/вых: 64/48
- Канал FDD, RS-232, Ethernet, USВ
- Сетевая поддержка LAN (Ethernet)
- Накопитель USB: 128Мб
- Кабели FDD, USB-FLASH
- Эмулятор УЧПУ для PC
- Габариты: 439х340х140

Рис. 4 – Внешний вид NC-220
NC-230
Устройство УЧПУ NC-230 предназначено для управления двух суппортными станками, обрабатывающими фрезерными и токарными центрами. Заложенный принцип компактности сделал возможным получение в устройстве высокой надежности, помехозащищенности, малого потребления мощности.
Основные характеристики:
- ЦАП 6 каналов
- ДОС 5 каналов
- Входы 32-128
- Выходы 24-96
- Дисплей: 10,4″
- Корректоры: F%, S%, MODE
- Герметизированная кнопочная клавиатура
- Кнопки: «ПУСК», «СТОП»
- Кнопка аварийного выключения (Грибок)
- Функциональная клавиатура для реализации станочного пульта
- Стандартное фрезерно-токарное программное обеспечение
- Оптоизолированные выходы 48-96 каналов
- Оптоизолированные входы 64-128 каналов
- Канал FDD, RS-232, Ethernet, USВ
- Сетевая поддержка LAN (Ethernet)
- Накопитель USB: 128Мб
- Кабели FDD, USB-FLASH
- Эмулятор УЧПУ для PC
- Габариты: 439х340х140

Рис. 5 – Внешний вид NC-230
Выбираем устройство УЧПУ NC-202, так как оно наиболее подходит для реализации поставленных задач.
9. Описание УЧПУ NC-202
Устройство числового программного управления NC-202 применяется в машиностроение, станкостроение, металлообрабатывающей, деревообрабатыва-
ющей в других отраслях промышленности.
УЧПУ используют как комплектующее изделие при создании комплексов «устройство – объект управления», например, технологических комплексов, установок, высокоавтоматизированных станков и обрабатывающих центров таких групп, как фрезерно–сверлильно–расточные, токарно–карусельно–револьверные, газоплазменные, лазерные, деревообраба-тывающие и т. д.
По уровню излучаемых индустриальных радиопомех УЧПУ по СИСПР 22 97 относится к оборудованию класса А. УЧПУ должно эксплуатироваться в закрытых помещениях с соблюдением следующих требований к условиям эксплуатации:
а) режим работы:
- температура окружающей среды от 5 до 40°С*;
- относительная влажность воздуха от 40 до 80%** при 25°С;
б) режим хранения:
- температура окружающей среды от 5 до 50°С;
- относительная влажность воздуха не более 80% при 25°С.
В зоне эксплуатации УЧПУ должны быть приняты меры, исключающие попадание на внешние поверхности и внутрь УЧПУ пыли, влаги, масла, стружки, охлаждающей жидкости, паров и газов в концентрациях, повреждающих металл и изоляцию, в том числе, во время технического обслуживания.
Вибрация в рабочей зоне производственного помещения, действующая на УЧПУ вдоль его вертикальной оси, не должна иметь частоту выше 25 Гц и амплитуду перемещения более 0,1 мм.
Питание УЧПУ должно осуществляться однофазным напряжение переменного тока ~220 +22/-33 В, частотой 50+1 Гц.
Подключение УЧПУ к промышленной сети должно производиться только через развязывающий трансформатор мощностью не менее 300 ВА.
Подводка питающей сети к УЧПУ должна быть проведена с соблюдением .
Подводка питающей сети к УЧПУ должна быть проведена с соблюдением требований МЭК 550-77 по защите её от электромагнитных помех, прерываний и провалов напряжения.
Не следует подключать к этой сети энергетические системы, работа которых может вызвать нарушения в работе данной сети по допустимым уровням значений питающего напряжения, уровню и спектру помех, длительности прерываний и провалов питающего напряжения.
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ УЧПУ
- Число управляемых координат – 4 (со шпинделем)
- Число каналов ЦИП — 3
- Число каналов фотоэлектрического датчика перемещений (энкодера)- 3
- Число каналов ЦАП(14 разрядов)- 1
- Число каналов электронного штурвала — 1
- Число дискретных каналов вх./вых. — 40/24
- Ёмкость памяти:
- ОЗУ — SDRAM: 16/32 МБ
- ЗУ – Flash Disk:
DOM: 32/64/128 МБ
- Дисплей:
- цветной, ЖК, с плоским экраном — TFT 10.4”
- разрешающая способность — 640х480
- видеопамять — SDRAM: 1/2 МБ
- интерфейс — LCD
- Клавиатура:
- число клавиш – 80 клавиш
- интерфейс — EXKB
- Интерфейсы внешних устройств ввода/вывода:
- интерфейс FDD — 1 канал на 2 FDD:
3,5” (1,44МБ)
- последовательный интерфейс — COM2: RS232/RS485
- интерфейс LAN — Ethernet: 10/100 Мбит/с
- интерфейс USB — 1,6 Мбит/с
- Номинальное напряжение питания — ~220 В, 50 Гц
- Потребляемая мощность (без периферии) — 60 ВА, не более
- Потребляемый ток (без периферии) — 250 мА, не более
- Степень защиты оболочкой:
- лицевая панель — IP54
- корпус — IP20
- Габаритные размеры — 432х322х107 мм
- Масса — 9,5 кг, не более
УЧПУ является программно управляемым устройством, имеет аппаратную и программную части. Структурная схема УЧПУ представлена на рисунке 6. Структура УЧПУ включает БУ, ПО и БП.
БУ управляет работой УЧПУ и внешнего подключаемого оборудования. Ядром БУ является плата CPU. Взаимодействие плат CPU и ECDP I/O в БУ обеспечивают сигналы внешней локальной шины процессора ISA BUS 16. Контроллер периферии, который расположен в плате ECDP I/O, управляет всеми каналами связи с объектом управления. Через каналы платы ECDP I/O осуществляется управление периферийным оборудованием:
- шаговыми двигателями с импульсным входом без обратной связи или цифровыми сервоприводами с импульсным входом и обратной связью;
- преобразователями перемещений фотоэлектрического типа;
- преобразователями перемещений фотоэлектрического типа (энкодерами) в качестве ДОС (напряжение питания +5В, выходной сигнал — прямоугольные импульсы TTL);
- следящим электроприводом с аналоговым входным напряжением +10В для управления шпинделем;
- электронным штурвалом фотоэлектрического типа (напряжение питания +5В, выходной сигнал — прямоугольные импульсы TTL).
По каналам входа/выхода плата ECDP I/O обеспечивает двунаправленную связь (опрос/управляющее воздействие) между УЧПУ и электрооборудованием управляемого объекта. Обмен информацией происходит под управлением ПРО.
Управление дополнительными устройствами ввода/вывода производится платой CPU через интерфейсы внешних устройств: RS-232/485 (COM2), FDD, LAN. Управление каналом USB производится контроллером канала платы USB.
ПО обеспечивает выполнение всех функций управления и контроля в системе «ОПЕРАТОР-УЧПУ-ОБЪЕКТ УПРАВЛЕНИЯ». Структура ПО включает блок дисплея, блок клавиатуры, плату переключателей, плату индикации, сетевой и аварийный выключатель. Управление дисплеем производится CPU через интерфейс LCD по внутреннему кабелю. Управление клавиатурой осуществляется CPU по внутреннему кабелю через интерфейс клавиатуры EXKB. Управление платой переключателей производится контроллером периферии.
БП обеспечивает УЧПУ необходимым набором питающих напряжений. Питание от БП поступает в плату ECDP I/O, а из неё через промежуточные разъёмы подаётся на составные части УЧПУ.
Связь УЧПУ с объектом управления и внешними устройствами ввода/вывода осуществляется через внешние разъёмы.
Элементы управления пульта оператора
В УЧПУ функции ПО выполняют блок дисплея, блок клавиатуры, плата переключателей NC202-43, плата индикации NC202-44, сетевой выключатель NC202-46 и аварийный выключатель NC202-47. Все составные части ПО установлены на внутренней стороне лицевой панели УЧПУ. Элементы управления и контроля ПО через отверстия в лицевой панели выведены на её наружную поверхность. Таким образом, лицевая панель УЧПУ представляет собой панель ПО.
10. Выбор типа преобразователя для двигателя главного движения
Частотно-регулируемый электропривод, в общих чертах состоит из трехфазного электродвигателя переменного тока и инвертера, который обеспечивает, как минимум, плавный пуск электродвигателя, его остановку, изменение скорости и направления вращения. Возможность подобного регулирования улучшает динамику работы электродвигателя и, тем самым, повышает надежность и долговечность работы технологического оборудования. Более того, инвертер позволяет внедрить автоматизацию практически любого технологического процесса. При этом создается система с обратной связью, где инвертер автоматически изменяет скорость вращения электродвигателя таким образом, чтобы поддерживать на заданном уровне различные параметры системы, например, давление, расход, температура, уровень жидкости и т.п. За счето оптимального управления электродвигателем в зависимости от нагрузки, потребление электроэнергии в насосных, вентиляторных, компрессорных и др. агрегатах снижается на 40-50%, а пусковые токи, составляющие 600-700% от номинального тока и являющиеся бичом для пускорегулирующей аппаратуры, исчезают совсем. Таким образом, применение регулируемых электроприводов на основе частотных преобразователей позволяет создать новую технологию энергосбережения, в которой не только экономится электрическая энергия, но и увеличивается срок службы электродвигателей и технологического оборудования в целом.
Частотный преобразователь, или по международной терминологии – инвертер, представляет собой электронное статическое устройство, предназначенное для управления асинхронного или синхронного электродвигателя переменного тока. На выходе преобразователя формируется электрическое напряжение с переменной амплитудой и частотой. Само название «частотный преобразователь» обусловлено тем, что регулирование скорости вращения двигателя осуществляется изменением частоты напряжения питания, подаваемого на двигатель от преобразователя. Т.о. инвертер преобразует напряжение питающей сети 220В/380В частотой 50Гц в выходное импульсное напряжение, которое формирует в обмотках двигателя синусоидальный ток частотой от 0 до 400 Гц и выше.
Два способа регулирования скорости вращения двигателя с помощью инвертера:
Увеличивая частоту и амплитуду напряжения подаваемого с инвертера на обмотки асинхронного электродвигателя можно обеспечить плавное регулирование скорости вращения вала электродвигателя. Изменение частоты питающего двигатель напряжения приводит к отклонению от расчетных значений максимального и пускового моментов двигателя, к.п.д., коэффициента мощности. Поэтому для поддержания требуемых рабочих характеристик двигателя необходимо с изменением частоты одновременно соответственно изменять и амплитуду напряжения. Такой, достаточно простой способ регулирования скорости называют скалярным. В существующих преобразователях при скалярном управлении чаще всего поддерживается постоянным отношение максимального момента двигателя к моменту сопротивления на валу. Т.е. при изменении частоты амплитуда напряжения изменяется т.о., что отношение максимального момента двигателя к текущему моменту нагрузки остается неизменным. Это отношение называется перегрузочной способностью двигателя. При постоянстве перегрузочной способности номинальные коэффициенты мощности и к.п.д. двигателя на всем диапазоне регулирования частоты вращения практически не меняются. Скалярный метод управления целесообразно реализовывать при невысоких требованиях к диапазону регулирования частоты вращения двигателя и стабильности поддержания заданных параметров. Важным достоинством скалярного метода является возможность одновременного управления группой электродвигателей. Скалярное управление достаточно для большинства практических случаев применения частотно регулируемого электропривода с диапазоном регулирования частоты вращения до 1:40.
Для быстродействующих приводов может потребоваться векторное управление. Оно позволяет существенно увеличить диапазон управления и точность регулирования, однако существенно дороже скалярного. Векторное управление обеспечивает непосредственное управление вращающим моментом двигателя. Вращающий момент определяется током статора, который создает возбуждающее магнитное поле. При непосредственном управлении моментом необходимо изменять кроме амплитуды и фазу статорного тока, т.е. вектор тока. Этим и обусловлен термин «векторное управление». Оно обеспечивает диапазон регулирования до1:1000 и выше, точность регулирования по скорости – сотые доли процента, точность по моменту – единицы процента. Доля таких приводов постепенно растёт и на сегодняшний день составляет около 5% от общего числа.
Частотные преобразователи обеспечивают:
- плавный пуск без пусковых токов и ударов и остановку электродвигателя, а также изменение направления его вращения.
- полная электрозащита двигателя от перегрузок по току, перегрева, обрыва фаз и утечек на землю.
- плавное регулирование скорости вращения электродвигателя практически от нуля до номинального значения в ранее нерегулируемых технологических процессах.
- создание замкнутых систем с возможностью точного поддержания задан-
ных
- создание замкнутых систем с возможностью точного поддержания заданных технологических параметров
- синхронное управление несколькими электродвигателями от одного преобразователя частоты.
- уменьшение потребления электроэнергии за счет оптимального управления электродвигателем в зависимости от нагрузки.
- увеличение срока службы электропривода и оборудования.
- повышение надежности и долговечности работы оборудования, упрощение его технического обслуживания.
Способы управления частотным преобразователем.
Управление преобразователем частоты можно осуществлять со встроенной или выносной панели управления, либо с помощью внешних сигналов. Во втором случае скорость вращения задается аналоговым сигналом 0-10 В или 4-20 мA, а команды пуска, останова и изменения режимов вращения подаются дискретными сигналами.
Правило подбора частотного преобразователя.
Как правило, мощность частотного преобразователя подбирается равной мощности электродвигателя. Это правило распространяется на электродвигатели номинальным количеством оборотов 1500 и 3000 оборотов в минуту. При использовании других электродвигателей или в некоторых особых случаях применения выбор частотного преобразователя (инвертера) должен соответствовать следующему условию: номинальный выходной ток частотного преобразователя должен быть не меньше, а лучше — чуть больше, номинального тока электродвигателя.
Для двигателя главного движения выберем преобразователь фирмы TECORP из серии V5000.
Преобразователи частоты Tecorp серии HC2-V5000 имеют уникальный общий векторный контроль, и превосходный характер вращающего момента по сравнению с управлением по V/F. Преобразователи Tecorp HC2-V5000 серии
реализуют стабильный запуск и точное управление при низких скоростях и яв-
ляются лучшим приложением мощности для высокоточного оборудования.
Преимущества и некоторые технические характеристики частотных преобразователей Tecorp HC2-V5000 серии:
- Высокий пусковой момент > 150% номинального момента при Fвых і 1Гц.
Уникальный общий векторный контроль, и превосходный характер вращающего момента по сравнению с управлением по V/F.
Встроенный тормозной резистор > Дополнительный внешний тормозной резистор увеличит тормозную мощность.
•Многочисленные функции защиты.
•Функции ограничения резонанса в высокоскоростных режимах и больших токах (больше чем 250 % номинального тока).
Модернизированный, не резонансный запуск (перезапуск после мгновенной остановки, предотвращение опрокидывания, сброс аварий).
Встроенное ограничение перенапряжения.
Эффективное заземление.
Многоскоростной режим (max. 8 скоростей), UP/DOWN изменение скорости и JOG (толчковый) пуск.
Режим энергосбережения.
Мощность преобразователя выбираем исходя из мощности двигателя М1.
Выбираем преобразователь модели HC2V5G45P5E.
Частотный преобразователь Tecorp HC2V5G45P5E векторного управления для общепромышленного применения. Преобразователи частоты Tecorp HC2V5G45P5E были разработаны специально для интеллектуальных
приводов. Они обладают высоким КПД и позволяют осуществить как специальные, так и гибкие перестраиваемые приводные решения с учетом оптимизации процесса и простоты управления. Преобразователь частоты Tecorp HC2V5G45P5E может быть приспособлен под индивидуальные требования, так как это модульная система.
 Питание
Питание
Плавкий предохранитель, защитный выключатель.
Контактор: не использовать его для выключения преобразователя.
Реактор: реактор необходим, когда мощность выше 1000kVa.
Преобразователь АС:
Двигатель: 1: Согласуйте данные двигателя и нагрузку машины. 2: если требуется работа на низкой скорости в течение долгого времени, необходимо использовать специальный двигатель.
Рис.15 — Общая схема подключения.
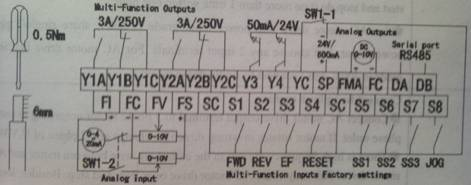
Рис. 16 – Терминал управления
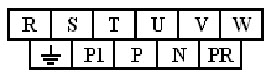
Рис. 17 – Силовой терминал
Таблица 8
Описание силовых контактов.
|
Символ |
Описание |
|
R S T |
Соединение с одной/тремя фазами напряжения Терминал L1/R, L2/S, L3/T соединить с одной/тремя фазами напряжения через защитный выключатель или предохранитель, защищающий преобразователь. Чтобы отключить напряжение и избежать несчастного случая, когда напряжение преобразователя AC включено, необходим магнитный контактор. |
|
U V W |
Соединение с 3 фазным двигателем Подключить AC двигатель на выходные терминалы 3-фазного двигателя согласно правильному чередованию фаз. Если двигатель вращается в неправильную сторону, изменить какие-нибудь 2 фазы U, V, W. |
|
P PR |
Соединение с внешним тормозным резистором (≤15KW)(опция) ≤15KW с компонентом тормоза связь через терминал P и PR. |
|
P N |
Выход постоянного тока для соединения с внешним модулем торможения (≥18.5 кВт, опция) Для машин ≥18.5кВт используют схему без внешнего модуля тормозного сопротивления. Для улучшения энергии, расходуемой на торможение, наличие тормозного сопротивления и тормозной модуль необходимы (оба являются дополнительными).
|
Таблица 9
Описание управляющих контактов.
|
Сим. |
Название |
Описание |
|
|
Аналоговые входа |
FS |
Плюс |
Питпние +12VDC для установки частоты (1…5кΩ) |
|
FV |
Вход по напр. |
●Задание частоты напряжением. 0…10V DC >>> 0…100 % +10V… 0V DC >>> 0…100 % ●Задание ПИД, входное сопротивление:20kΩ |
|
|
FI |
Вход по току |
●Задание частоты током или напряжением (разомкнуть J1) 4 … 20mA DC >>> 0 … 100 % 0 … 10V DC >>> 0 … 100%(разомкнуть J1) ●Обратная связь ПИД, входное сопротивление:250 Ω |
|
|
FC |
Общий |
Общий терминал аналоговых сигналов |
|
|
Цифровые входа |
S1 |
пуск/стоп |
S1-ON:вращение вправоOFF: останов |
|
S2 |
реверс/стоп |
Терминалы S2…S8 используются для вкл. вращения, тревоги, сигналов выбора частоты и т.д. |
|
|
S3 |
Вход 3 |
||
|
Цифровые входа |
S4 |
Вход 4 |
Для деталей, пожалуйста, обратитесь к главе НАСТРОЙКИ (S2…S8) (B01…B07) |
|
S5 |
Вход 5 |
||
|
S6 |
Вход 6 |
||
|
S7 |
Вход 7 |
||
|
S8 |
Вход 8 |
||
|
SP |
+20V |
Максимальный вхлдной ток — 500mA. |
|
|
SC |
Общий |
Общий терминал цифровых сигналов. |
|
|
Аналоговые выхода |
FMA |
Вых. Индикация |
Сигнал монитора моделируемого напряжения 0…+10VDC Выберите одну из выходная частота (10V = max частота A10) выходной ток (10V = номинальный ток преобразователя AC)выходное напряжение (10V = напряжение преобразователя AC) напряжение шины DC (10V=400V (питание 200V) =800V (питание 400V) |
|
Окончание таблицы 9 |
|||
|
Сим. |
Название |
Описание |
|
|
Выхода |
Y1, Y2, A, B, C |
Релейный выход. |
Преобразователь AC выдает черезвыхода сигналы: «УПРАВЛЕНИЕ, ДОСТИЖЕНИЕ ЧАСТОТЫ, ПЕРЕГРУЗКА И Т.Д …. Пожалуйста, посмотрите функциональную установку терминалов. |
|
Y3, Y4 |
Транзистор ный выход |
||
|
Связь. |
DA, DB |
RS485 |
Коммуникация RS485 допускает соединять максимально 31 преобразователь, |
|
Заземление. |
EG |
Общий. |
Подключение заземляющих устройств. |
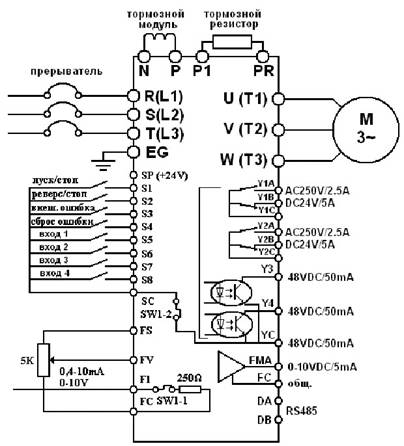
Рис.18 — Основная монтажная схема
Панель управления.
У серии V5000 преобразователей AC есть 128*64 LCD или на 6 разрядов LED панель управления (опция), которые могут показать рабочий статус, рабочее направление, тревогу, сигнальную информацию, данные проверки, статус ввода / вывода, данные по функциям, и т.д.
Панель отделена и изолирована от входного потенциала. Панель может быть снята во время работы. Но не рекомендуется ее снятие, когда панель выполняет операцию СТАРТ/СТОП и установка частоты.

Рис. 19 — LCD Панель управления
11. Выбор сервосистемы для координатX, Z, Сервоприводы
Последнее поколение сервосистем TECORP серии EPS характеризуется самой современной технологией, простым управлением и чрезвычайно компактным исполнением. Новые функции, например, система подавления вибрации и улучшенная автонастройка в режиме реального времени обеспечивают самую высокую точность, малое время позиционирования и простой ввод в эксплуатацию.
Таблица 10
Спецификация преобразователя EPS серии.
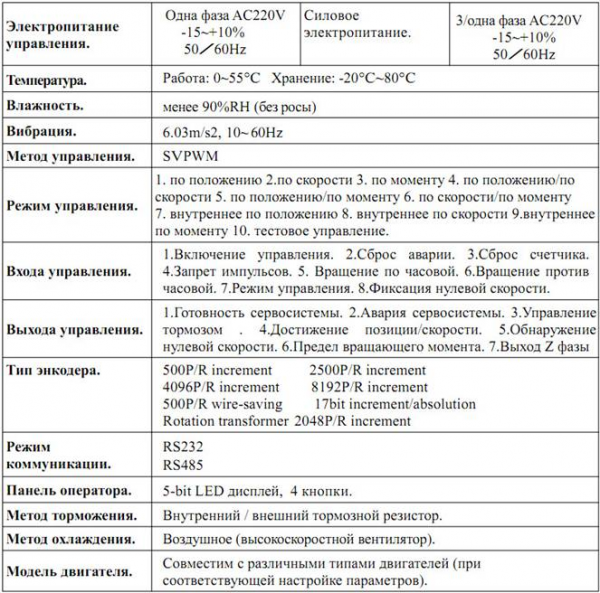
Таблица 11
Функциональный лист преобразователя EPS серии.
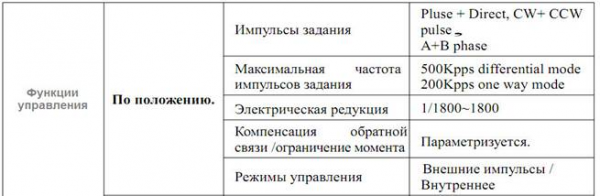
Окончание таблицы 11
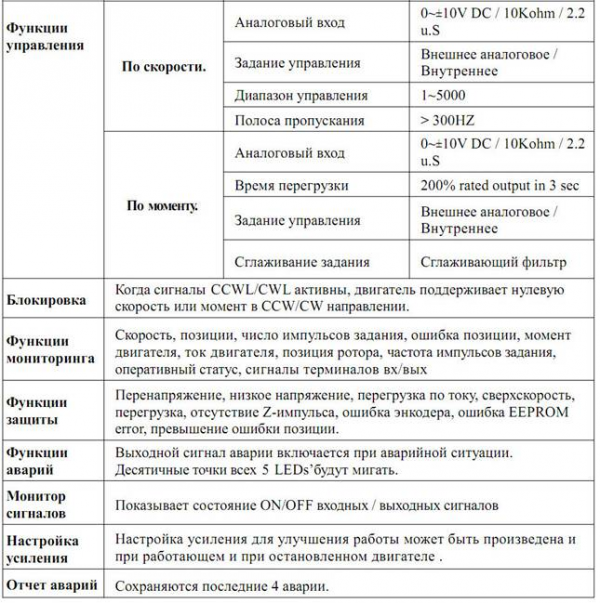
Таблица 12
Сервомоторы для преобразователей серии EPS.
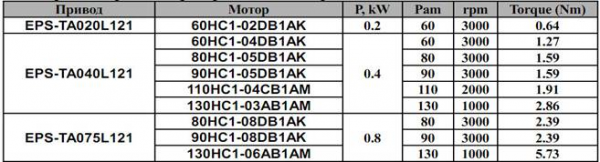
Окончание таблицы 12
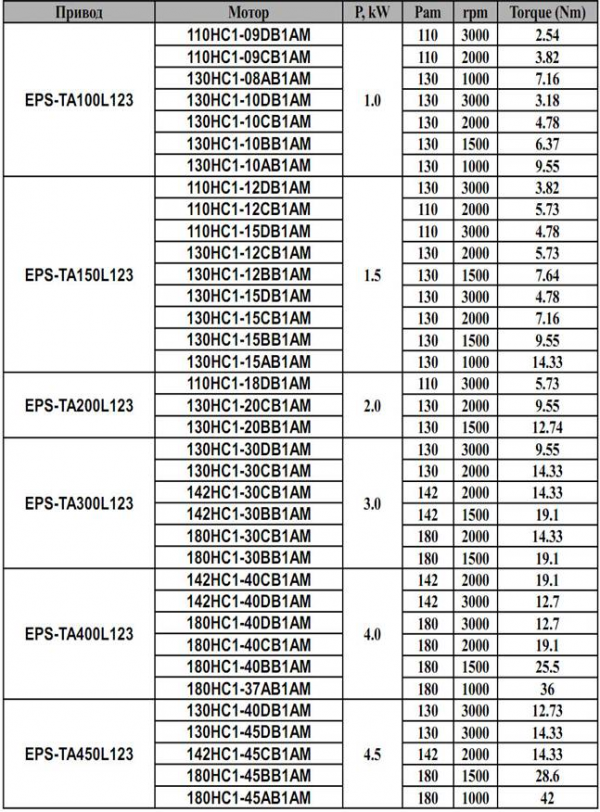
Исходя из паспортных данных старых электродвигателей (Р= 1,5 кВт, 15 Нм), выбираем сервопривод марки EPS-TA150L123 с сервомотором 130HC1-
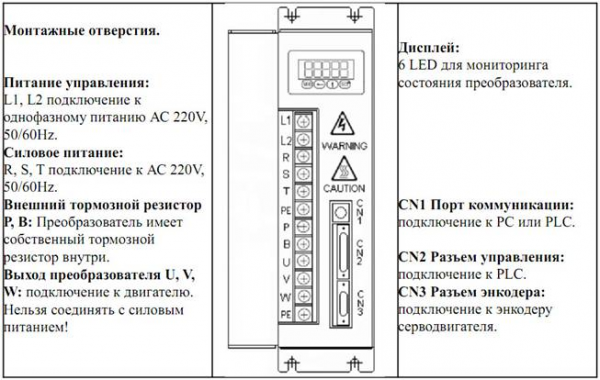
Рис. 20 — Описание составных частей
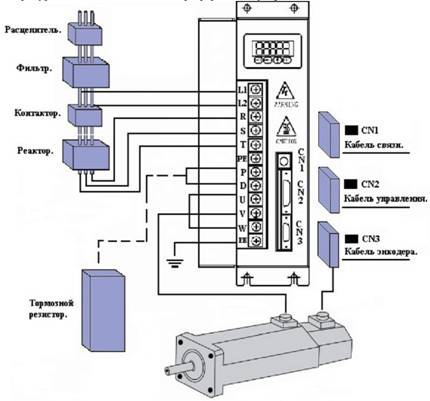
Рис. 21 — Конфигурация и подключение к периферийным устройствам.
15AB1AM.
Выбор бесконтактных выключателей
Выбор бесконтактного выключателя при проектировании нового или модернизации существующего оборудования желательно проводить, учитывая три группы функциональных и эксплуатационных параметров:
- вид объекта, воздействующего на чувствительный элемент ВБ;
- требуемые параметры коммутационного элемента ВБ;
- параметры условий эксплуатации и конструктивные особенности оборудования.
Выбор по виду воздействующего объекта
Индуктивные ВБ срабатывают при приближении объектов из металла. Объектом может служить как металлический элемент конструкции, так и металлическая пластина, прикрепленная к контролируемой движущейся части оборудования.
Емкостные ВБ применяют для контроля перемещения или наличия любого материала, в том числе жидкого или сыпучего.
Оптические ВБ применяют для определения перемещения, наличия или контроля размеров объектов из любого непрозрачного материала.
Выбор по параметрам коммутационного элемента
Электрические параметры коммутационного элемента ВБ выбирают, исходя из параметров схемы питания и характера коммутируемой нагрузки.
Стандартными категориями применения для ВБ постоянного тока являются DC -12 и DC -13, при этом обеспечивается коммутация активной и индуктивной нагрузки.
Стандартными категориями применения для ВБ переменного тока являются АС-12 и АС-14, при этом обеспечивается коммутация активной нагрузки и слаботочной индуктивной нагрузки с током удержания до 0,2 А.
При построении простых схем управления можно применить ВБ с напряжением питания переменного тока, тем самым исключить из схемы источник питания постоянного тока. Коммутационный элемент в этом случае может непосредственно управлять катушкой пускателя или аналогичным исполнительным элементом.
Выбор по условиям эксплуатации
Исходя из конструктивных особенностей оборудования, выбираются габариты корпуса ВБ и расстояние срабатывания. При наличии значительных люфтов движущихся частей оборудования желательно применять ВБ с увеличенным расстоянием срабатывания. Конструктивные особенности оборудования определяют условия установки индуктивных и емкостных ВБ.
Условия эксплуатации ВБ могут быть достаточно жесткими. Бесконтактные выключатели изначально создавались для таких условий эксплуатации, где контактные конечные выключатели работали ненадежно или вообще не могли быть применены.
Степень защиты корпуса IP67 обеспечивает работоспособность ВБ под струями жидкости, но изделия с регулировкой имеют степень защиты IP65. По спецзаказу возможна поставка модифицированных изделий для эксплуатации в особых условиях и агрессивных средах.
Функции коммутационного элемента
Функция включения (НО) обеспечивает протекание тока нагрузки при обнаружении объекта воздействия и прерывание протекания тока при отсутствии объекта воздействия.
Функция отключения (НЗ) обеспечивает прерывание протекания тока нагрузки при обнаружении объекта воздействия и протекание тока при отсутствии объекта воздействия.
Функция включения-отключения или переключения («ИЛИ») является комбинированной функцией, включающей в себя как функцию включения, так и функцию отключения. Программируемая функция – один выход ВБ может
программироваться пользователем как функция НО или как функция НЗ.
Схемы выходного каскада ВБ
Ниже приводятся примеры фрагментов схем коммутационных элементов различных ВБ с подключением питания и нагрузки.
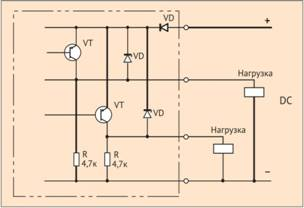
Рис.22 — постоянный ток, PNP, «ИЛИ»
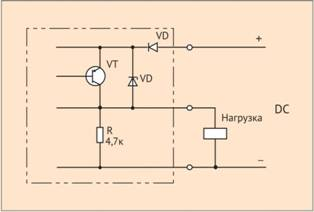
Рис.23 — постоянный ток, PNP, НО или НЗ
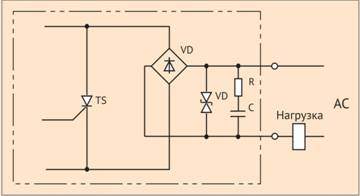
Рис.24 — переменный ток
Из [18] выбираем бесконтактный выключатель марки БВК201-24, U=24 В,I=0,2 A
Выбор электромагнита золотника на примере YA1.
Выбор электромагнитапроизводим по условию:
U ном.эмф. ≥ Uц.у. ,
где U ном. эмф. -номинальное напряжение электромагнита, В;
U ц.у. — номинальное напряжение цепи управления, В.
U ном.эмф. ≥ 110 В
По [19] выбираем электромагнит марки
SP-COU-110DC /80 с U ном. э.м. =110 В, Iном. э.м. =0,3 А, Р=33 Вт.
Выбор остальных электромагнитов аналогичен, данные заносим в таблицу 13.
Таблица 13
Список выбранных электромагнитов.
|
Обозначение |
Марка |
U ном. э.м ,В |
I ном. э.м ,А |
|
YA1 |
SP-COU-110DC /80 |
110 |
|
|
YA2 |
SP-COU-110DC /80 |
110 |
0,3 |
|
YA3 |
SP-COU-110DC /80 |
110 |
0,3 |
|
YA4 |
SP-COU-110DC /80 |
110 |
0,3 |
Выбор магнитных пускателей на примере КМ1.
Магнитные пускатели представляют собой аппараты, с помощью которых путем воздействия на электромагниты производится управления контактами, замыкающими и размыкающими силовые и вспомогательные цепи. Мощность, необходимая для питания катушек электромагнитов в цепях управления, незначительна по сравнению с мощностью силовых цепей.
Выбор магнитных пускателей производят в соответствии со следующими условиями:
1.Номинальное напряжение магнитных пускателей не должно быть меньше напряжения питания
Uн/Uп, В
где Uп=110В – напряжение питания магнитного пускателя, В
2. Ток, протекающий по силовым контактам магнитных пускателей должен
быть больше расчетного тока нагрузки.
Iн/Iрасч, А
где Iрасч.=0.63 А – ток двигателя КМ2
Исходя из этих условий, по [20] выбираем магнитный пускатель типа КМИ-
10910 9 А 110 В/АС-3 1НО ИЭК: Iн=9 А, Uн=110В.
Выбор остальных магнитных пускателей аналогичен, данные заносим в таблицу 14
Таблица 14
Список выбранных магнитных пускателей.
|
Обозначение |
Марка |
U н ,В |
I н ,А |
|
КМ1 |
КМИ-10910 |
110 |
9 |
|
КМ2 |
КМИ-10910 |
110 |
9 |
|
КМ3 |
КМИ-10910 |
110 |
9 |
|
КМ4 |
КМИ-10910 |
110 |
9 |
|
КМ5 |
КМИ-10910 |
110 |
9 |
|
КМ6 |
КМИ-10910 |
110 |
9 |
Выбор лампы местного освещения производим по условию:
U ном л.м.о. ≥Uц.м.о.
где U ном л.м.о. — номинальное напряжение лампы, В;
U ц.м.о. — напряжение цепи местного освещения, В.
U ном л.м.о. ≥24 В
По [21] выбираем светильник станочный на гибкой стойке НКП 03-60-003 с U ном л.м.о. =24 В и Рномл.м.о. =60 Вт.
Выбор блока питания 24 В производим по условиям:
U вых =Uпотр.
I бп. ≥∑Iпотр.,
где U потр. =24 В – напряжение питания потребителей
∑I потр. =1.6 A
Исходя из этих условий, по [22] выбираем блок питания марки AD1048-24FS, 2 А, 24 VDC.
Выбор понижающего трансформатора TV1 для питания цепей УЧПУ и блока питания производим по условиям:
U ном 1 тр ≥ Uс ,
U ном 2 тр ≥ Uц.у ,
S ном.тр ≥ Sрасч2.1 ,
где U ном 1 тр — номинальное напряжение первичной обмотки трансформатора, В;
U ном 2 тр — номинальное напряжение вторичной обмотки питания трансформатора, В;
S ном.тр — номинальная мощность трансформатора, В·А;
S рас2.1 — полная расчетная нагрузка первичной обмотки трансформатора, ВА.
Полную расчетную нагрузку первичной обмотки трансформатора S рас2.1 , ВА, определяем по формуле:
S рас2.1 =S2 /ηтр , (1)
где S 2 — суммарная полная мощность нагрузки вторичных обмоток, ВА;
η тр — коэффициент полезного действия трансформатора, о.е.
Суммарную мощность нагрузки S 2 , ВА, определяем по формуле:
S 2 =Iчпу ·Uчпу +Iбп ·Uбп . , (2)
S 2 =0,25·220+2·220=495 В·А
S рас2.1 =495/0,91=544 В·А
U ном 1 тр ≥380 В
U ном 2 тр ≥220 В
S ном.тр ≥544 В·А
По[21]выбираем трансформатор марки ОСМ-0,63 380/5-220 с U ном 1 тр =380 В, Uном 2 тр =220 В, Sном.тр =630 В·А.
Выбор понижающего трансформатора TV2 для питания цепей управления и местного освещения производим по условиям:
U ном 1 тр ≥ Uс ,
U ном 2 тр ≥ Uц.у ,
U ном 2 м.о. =Uц.м.о. ,
S ном.тр ≥ Sрасч2.1 ,
где U ном1 тр — номинальное напряжение первичной обмотки трансформатора, В;
U ном 2 тр — номинальное напряжение вторичной обмотки питания трансформа-
тора, В;
U ном2 м.о. — номинальное напряжение обмотки питания местного освещения, В;
S ном.тр — номинальная мощность трансформатора, В·А;
S рас2.1 — полная расчетная нагрузка первичной обмотки трансформатора, ВА.
Полную расчетную нагрузку первичной обмотки трансформатора S рас2.1 , В·А, определяем по формуле:
S рас2.1 =S2 /ηтр , (3)
где S 2 — суммарная полная мощность нагрузки вторичных обмоток, ВА;
η тр — коэффициент полезного действия трансформатора, о.е.
Суммарную мощность нагрузки S 2 , В·А, определяем по формуле:
S 2 =Iц.у. ·Uц.у. +Iл.м.о ·Uном.л.м.о. , (4)
S 2 =2,1·110+2,5·24=83 В·А
S рас2.1 =83/0,91=91 В·А
U ном 1 тр ≥380 В
U ном 2 тр ≥110 В
U ном 2 м.о. ≥24 В
S ном.тр ≥91 В·А
По [21] выбираем трансформатор маркиОСМ1-0,1 380/5-22-110 с U ном 1 тр =380 В, Uном 2 тр =110 В,Uном 2 м.о. =24 В, Sном.тр =100 В·А.
По паспорту станка выбираем элементы для подавления помех RC1…RC10
Резистор МЛТ-2.100 Ом ±10% ОЖО467.180ТУ
Конденсатор К73-17-400-0,47 мКф ±10% ОЖО.461.104ТУ
По паспорту станка выбираем элементы для подавления помех электродвигателей RC-M2…RC-M6
Резистор МЛТ-2.270 Ом ±10% ОЖО467.180ТУ
Конденсатор К73-17-630-0,22 мКф ±10% ОЖО.461.104ТУ
12. Выбор защитной аппаратуры и питающих проводов
Провода выбирают с учетом ряда соображений. Количество проводов и число жил в каждом ясны из схемы электрической соединений. Сечение жил определяет токовая нагрузка, при этом во всех случаях выбор сечений проводят по нагреву (каждой нагрузке должно соответствовать сечение не менее определяемого по таблице в ПУЭ).
а) Выбор сечения жилы провода цепи управления U =110В.
I p
Р п
U н
I р
Но так как одновременно включаются пять магнитных пускателей и 2 эл. магнитных муфты, то пусковой ток в цепи управления
Iр = 0,3.7 = 2,1 А
Выбираем провод марки ПВ3 сечением 0,75 мм 2 .
б) Выбор сечения жил провода питающего цепь управления U =24В.
Расчетный ток нагрузки цепи управления определяется как сумма расчетных токов элементов схемы одновременно находящихся во включенном состоянии (блоков входов/выходов, бесконтактных выключателей)
I р
I р =
Исходя из этого выбираем провод марки ПВ3 сечением 0,75 мм 2 .
Выбор теплового реле FP1 для двигателя М2.
Тепловые реле для защиты электродвигателей от перегрузок выбираем по условиям:
I ном.т.р. ≥Iном ,
где I ном.т.р. — номинальный ток теплового реле, А;
I ном.т.р. ≥0,63 А
По [20] выбираем тепловое реле FP1 марки РТИ-1304 с пределами регулирования 0.4-0.63 А.
Выбор остальных тепловых реле аналогичен, данные заносим таблицу 15
Таблица 15
Список выбранных тепловых реле.
|
Обозначение |
Марка |
Предел регулирования, А |
|
FP1 |
РТИ-1304 |
0.4-0.63 |
|
FP2 |
РТИ-1306 |
1-1,6 |
|
FP3 |
РТИ-1305 |
0,63-1,0 |
|
FP4 |
РТИ-1304 |
0.4-0.63 |
|
FP5 |
РТИ-1304 |
0.4-0.63 |
Выбор автоматического выключателя на примереQF4 производим по условию:
I ном.р. ≥Iдл ,
где I ном.р. — номинальный ток теплового расцепителя автоматического вы-
ключателя, А;
I дл — длительный ток нагрузки цепи, А.
Длительный ток нагрузки цепи, I дл , А, находим по формуле:
I дл =∑Iном.д , (6)
где ∑I ном.д. — сумма номинальных токов электродвигателей, А;
I дл =0,63+1,25+0,8+0,63+0,63=3,94 А
I ном.р. ≥3,94 А
По [21] выбираем автоматический выключатель QF4 марки C60N 4A 3П 6 кА.
Поскольку автоматический выключатель имеет комбинированный расцепитель, то проверим выбранный выключатель на возможное срабатывание электромагнитного расцепителя по условию:
I ср.э.р. ≥1,25Iкр ,
где I ср.э.р. — ток срабатывания электромагнитного расцепителя, А;
I кр — наибольший возможный кратковременный ток в защищаемой цепи, А.
Ток срабатывания электромагнитного расцепителя, I ср.э.р. , А, находим по фор-
муле:
I ср.э.р. =10Iном.р , (7)
I ср.э.р. =10·4=40 А
В нашем случае наибольший кратковременный ток в защищаемой цепи определяется как сумма номинальных токов двигателей М2, М3, М4, М5 и М6:
I кр =Iном.д2 + Iном.д3 +Iном.д4 +Iном.д5 +Iном.д6 , (8)
где I ном.д2 — номинальный ток второго электродвигателя, А;
I ном.д3 — номинальный ток третьего электродвигателя, А;
I ном.д4 — номинальный ток четвёртого электродвигателя, А;
I ном.д5 — номинальный ток пятого электродвигателя, А;
I ном.д6 — номинальный ток шестого электродвигателя, А.
I кр =0,63+1,25+0,8+0,63+0,63=3,94 А
40 А≥1,25·3,94=4,92 А
Так как условие соблюдается, то выключатель выбран правильно. Окончательно выбираем автоматический выключатель QF4 марки C60N 4A 3П 6 кА.
Выбор остальных автоматических выключателей аналогичен, данные заносим таблицу 16
Таблица 16
Список выбранных автоматических выключателей
|
Обозначение |
Марка |
I ном.р. , А |
I дл , А |
I кр , А |
|
QF1 |
C60N 40A 3П 6 кА |
40 |
33,46 |
33,46 |
|
QF2 |
C60N2A 2П 6 кА |
2 |
1,66 |
1,66 |
|
QF3 |
C60N1A 2П 6 кА |
1 |
0,26 |
0,26 |
|
QF4 |
C60N 4A 3П 6 кА |
4 |
3,94 |
3,94 |
|
QF5 |
C60N16A 1П 6 кА |
16 |
16 |
16 |
|
QF6 |
C60N2A 1П 6 кА |
2 |
2 |
2 |
|
QF7 |
C60N0,5A 2П 6 кА |
0,5 |
0,25 |
0,25 |
|
QF8 |
C60N3A 2П 6 кА |
3 |
2,1 |
2,1 |
|
Окончание таблицы 16 |
||||
|
Обозначение |
Марка |
I ном.р. , А |
I дл , А |
I кр , А |
|
QF9 |
C60N3A 1П 6 кА |
3 |
2,5 |
2,5 |
|
QF10 |
C60N10A 2П 6 кА |
10 |
6,8 |
6,8 |
|
QF11 |
C60N10A 2П 6 кА |
10 |
6,8 |
6,8 |
|
QF12 |
C60N16A 3П 6 кА |
16 |
14 |
14 |
Заключение
В данном дипломном проекте была произведена модернизация станка модели 7800ИТФ3, выполнен критический анализ существующей системы управления, выявлены недостатки и предложены варианты модернизации. В расчетно-конструкторской части дипломного проекта был выполнен расчет и выбор сервосистемы необходимой мощности и момента привода подачи станка. Выполнен подбор аппаратуры и исполнительных органов, обоснованная целесообразность поставленной задачи.
Произведена замена старой системы УЧПУ на современную. Обеспечивается автоматическое программное управление скоростью, положением рабочих органов в режиме реального времени. Точность и безотказность при работе является важной особенностью современных систем.
В результате модернизации станок обеспечивает следующие технологические параметры:
1 Минимальная погрешность обработки заготовки.
2 Возможность подбора рабочего усилия и скорости в зависимости от качества, размера заготовки и вида операции, которая выполняется.
3 Снижение времени переналадки и настраивание на обработку.
4 Низкие энергетические затраты.
5 Повышение производительности работы.
6 Снижение удельной себестоимости произведенной продукции.
За счет введения новой системы управления существенно снижается время на ремонт, повышаются техника — экономические показатели.
Список использованной литературы
[Электронный ресурс]//URL: https://drprom.ru/diplomnaya/modernizatsiya-2/
1. ГОСТ 2.104 Основные надписи
2. ГОСТ 2.105 Общие требования к текстовым документам
3. ГОСТ 2.114 Технические условия. Правила построения, изложения и оформления
4. ГОСТ 2.305 Изображения-виды, разрезы, сечения
5. ГОСТ 2.701 Схемы. Виды и типы. Общие требования к выполнению
6. ГОСТ 2.702 Правила выполнения электрических схем
7. ГОСТ 12.2.009 Станки металлообрабатывающие. Общие требования безопасности
8. ГОСТ 7599 Станки металлообрабатывающие. Общие технические условия
9. ГОСТ Р 51345 Безопасность машин. Блокировочные устройства связанные с защитными устройствами. Принципы
10. ГОСТ Р МЭК 60204-1 Безопасность машин. Электрооборудование машин и механизмов. Часть 1. Общие требования
11.СТП УК 14-2004 Оборудование технологическое. Электроавтоматика. Монтаж. Общие технические условия
12 РД 153-34.0-03.150-00 Межотраслевые правила по охране труда (правила безопасности) при эксплуатации электроустановок
13. Правила устройства электроустановок. Изд. 7-е, доп. с исправлениями. М.: ЗАО«Энергосервис», 608 с.
14. Общий курс электропривода. М.Г. Чиликин, А.С. Сандлер. Изд. 6-е, доп. и перераб. М.: Энергоиздат, 1981, 575 с.
15. Типовые расчеты по электрооборудованию. В.И. Дьяков. Изд. 7-е. М.: Высшая школа, 1991, 160 с.
16. Как сделать проект небольшой электроустановки. Е.А. Каминский. Изд. 3-е, перераб. и доп. М.: Энергия, 1980, 120 с.
17. Комплект документации станка 7800ИТФ3
18. http://sensor-com.ru
19. http://www.atos.com
20. http://www.iek.com.ua
21. http://www.electro-mpo.ru
22. http://sensor-moscow.ru