
К числу важнейших факторов, определяющих технический уровень современных автомобилей, относится степень их оснащенности электронными устройствами. Поэтому разработка электронных систем управления агрегатами автомобилей является весьма актуальной задачей для отечественного автомобилестроения.
В настоящее время накоплен значительный опыт применения электронной аппаратуры в автомобилях. Использование этого опыта является важным условием ускорения разработок новых, более совершенных электронных устройств для автомобилей.
Часть материала представляет собой примеры конкретной реализации электронных систем управления.
Микропроцессорные системы управления
Электронные системы управления, создаваемые на базе дискретных элементов и интегральных микросхем, выполняющих какую-либо определенную задачу управления, относятся к системам с жесткой логикой, т. е. алгоритм их функционирования определяется схемотехникой системы. У микропроцессорных систем такое ограничение отсутствует, т. е. при одной и той же структуре данные системы могут реализовывать различные алгоритмы управления вследствие соответствующего изменения записи команд в элементах памяти системы. Благодаря этому микропроцессорные системы образуют особый класс электронных систем управления и обладают рядом уникальных возможностей с точки зрения реализации самых сложных задач управления.
В микропроцессорной системе обработка информации ведется в двоичном цифровом коде. Поэтому все многообразие поступающих в систему сигналов должно быть сведено к единой двоичной кодовой структуре, т. е. структуре вида «логический О» или «логическая 1». Сигналы, поступающие в систему управления, можно условно разделить на следующие группы:
- сигналы от контактных или других датчиков, имеющие только два возможных состояния — открыт («логическая 1») и закрыт («логический О»);
- сигналы от терминального устройства, т.
е. от элементов системы, на которые воздействует водитель для корректирования действия системы управления (например, датчик положения педали управления подачей топлива либо контроллер управления).
К этой группе могут быть отнесены и различные запросы на индикацию состояния тех или иных элементов системы управления;
- информация о режимах работы агрегатов автомобиля (температура узлов, их нагрузочный режим, напряжение бортовой сети, частоты вращения валов двигателя и трансмиссии и др.).
24 стр., 11911 слов
Система питания автомобиля с газобаллонным оборудованием
... газового оборудования. Первое поколение Системы с вакуумным управлением и механическим дозатором газа, которые устанавливают на бензиновые карбюраторные и простые инжекторные автомобили. В первом поколении используются как вакуумные, так и электронные газовые ...
Преобразование различных сигналов в требуемый их вид (цифровой код) для последующей обработки центральным процессором (ЦПУ) выполняют предварительные устройства, к которым можно отнести аналого-цифровые (АЦП) и цифроаналоговые (ЦАП) преобразователи, преобразователи частоты в напряжение (ПЧН).
АЦП применяют для преобразования непрерывного линейного сигнала датчиков температуры, давления, напряжения в цифровой код, а ЦАП — для обратного преобразования. Преобразование частот вращения валов в код может происходить как через промежуточный ПЧН с последующим преобразованием напряжения в код, гак и путем непосредственного преобразования частоты в код. Для контактных датчиков преобразования не требуется, так как их выходной сигнал имеет уровень, соответствующий или состоянию «логического О», или «логической 1». Сигналы терминального устройства уже, как правило, имеют необходимую для обработки процессором структуру и поэтому дальнейшего преобразования не требуют.
Все сигналы от внешних источников, преобразованные к единому виду, поступают на интерфейс ввода-вывода, который может входить в состав микросхемы процессора или выполняться в виде отдельных элементов. Устройство ввода-вывода обеспечивает совместную работу ЦПУ и всех других устройств системы, являющихся по отношению к ЦПУ внешними.
Работа с внешними устройствами выполняется либо по методу периодического опроса их состояния, либо посредством организации системы прерываний от них. При работе микропроцессора с реализацией системы прерываний в нем осуществляется следующий порядок действий:
1) в момент, когда одно из внешних устройств готово выдать или принять очередную информацию или оказать воздействие на функционирование системы управления, оно посылает в ЦПУ сигнал готовности (запрос на прерывание);
2) получив сигнал готовности от внешнего устройства, ЦПУ вначале заканчивает выполнение текущей команды, а затем приостанавливает выполнение действий, предусмотренных основной программой, и выдает сигнал готовности начать работу, связанную с возникшим прерыванием (разрешение прерывания);
3) при наличии обоих указанных сигналов готовности происходит обработка прерывания, т. е. выполнение подпрограммы, предусмотренной запросом данного внешнего устройства;
4) если во время решения ЦПУ текущей задачи сигнал готовности прислали несколько внешних устройств, то первой будет принята для обработки или выдана информация внешнему устройству со старшим приоритетом. Уровень приоритетности внешних устройств задается либо при проектировании системы, либо закладывается в программу.
Далее обрабатывается информация внешних устройств с очередностью, определяемой старшинством их приоритета. Число градаций старшинства приоритетов (так называемая глубина прерываний) зависит от типа микропроцессора. Она колеблется от 2 до 8 и более.
Для обеспечения работы микропроцессорной системы управления в реальном масштабе времени, т. е. с выдачей необходимых команд в определенные периоды времени, в ее состав вводят таймер, который обычно выполняют в виде отдельной интегральной микросхемы. Получив управляющую команду (управляющее слово), таймер формирует определенную последовательность временных сигналов. К числу таких, например, относится деление тактовой частоты, формирование единичных импульсов (режим одновибратора), а также различных комбинаций импульсов. Сигналы от таймера наряду с сигналами от других внешних устройств поступают в ЦПУ, где в соответствии с заложенными алгоритмами происходят все необходимые преобразования и вычисления и выдается решение. Таким решением может быть, например, номер включаемой передачи, требование выключения сцепления, степень открытия дроссельной заслонки.
Тема работы Модернизация автоматизированной системы управления ...
... преобразования, передачи и использования энергии, материалов или информации, существенно уменьшающих степень этого участия или трудоёмкость выполняемых операций. Целью дипломной работы является автоматизация системы управления технологическим процессом дожимной насосной станции. Автоматизация ...
Для работы ЦПУ постоянно требуются дополнительные сведения, различные константы, а также необходимо временное хранение промежуточной информации. Эти данные ЦПУ получает от запоминающих устройств (ЗУ) системы. Для приема, хранения и выдачи всевозможных промежуточных данных, а также сведений о текущем состоянии элементов, т. е. всей той информации, которая изменяется в процессе работы микропроцессорной системы управления, используется оперативное запоминающее устройство (ОЗУ).
Для хранения информации, которая не изменяется при работе микропроцессора, а также записи алгоритма функционирования системы применяются постоянные запоминающие устройства (ПЗУ) различного типа. Наиболее низкую стоимость имеют ПЗУ (ROM), программа в которые записывается при их изготовлении. Такие устройства применяются при массовом изготовлении микропроцессорных систем.
В программируемые запоминающие устройства ППЗУ (PROM) запись программы может быть осуществлена и после их изготовления на заводе. Поэтому данные устройства целесообразно применять при изготовлении относительно небольших серий микропроцессорных систем управления, особенно если в процессе их выпуска может возникнуть необходимость корректирования алгоритма управления.
В репрограммируемые запоминающие устройства РПЗУ (EPROM) программа может быть записана несколько раз. Однако эти устройства имеют более высокую стоимость, чем ПЗУ и ППЗУ. Поэтому РПЗУ в основном целесообразно применять только на стадии отладочных работ по микропроцессорным системам.
Для связи между выходами микропроцессора и исполнительными устройствами системы управления используются усилители сигналов или коммутационные элементы (силовые цепи).
Микропроцессорные системы отличаются большим разнообразием с точки зрения примененных типов устройств и их характеристик. Так, разрядность слова, т. е. число одновременно обрабатываемых разрядов, составляет 4 — 16 бит, тактовая частота — от одного до нескольких мегагерц, число уровней прерывания 2 — 8, объем ОЗУ — от 128 байт до нескольких килобайт, объем ПЗУ и ППЗУ — несколько килобайт. Например, объем ПЗУ системы управления двигателем и трансмиссией «Тойота» составляет 7,5 кбайт, объем ППЗУ системы управления сцеплением «Фиат» — 2 кбайт. В качестве ЦПУ могут использоваться как специальные микропроцессоры (например, в системе «Тойота»), так и серийные.
Особо перспективным является применение в системах управления агрегатами автомобилей однокристальных ЭВМ. В состав такой ЭВМ, выполненной в виде одной интегральной схемы, входят центральный процессор, генератор тактовых импульсов, ОЗУ, интерфейс ввода-вывода, таймер, контроллер прерываний, а также какое-либо из постоянных запоминающих устройств (ПЗУ, ППЗУ или РПЗУ с ультрафиолетовой системой стирания программы).
Часто в составе одной серии однокристальных ЭВМ выпускают модификации с различными вариантами ПЗУ. Основным преимуществом применения однокристальной ЭВМ является возможность значительного сокращения числа интегральных микросхем, образующих систему управления. Однокристальная ЭВМ в зависимости от структуры микропроцессорной системы управления может заменить 5 — 10 корпусов интегральных микросхем, что помимо уменьшения размеров аппаратуры управления обеспечивает и существенное повышение ее надежности в результате сокращения внешних соединений между корпусами микросхем.
Управление системой доставки продукции
... 2]. Транспортная система - транспортная инфраструктура, транспортные предприятия, транспортные средства и управление в совокупности. ... работы, небольшая скорость перевозки Практически не ограничена 4. Автомобильный Большая маневренность и подвижность; высокая скорость доставки ... Грузооборот – основной экономический показатель продукции транспорта, характеризующий суммарный вес грузов, перевезенных ...
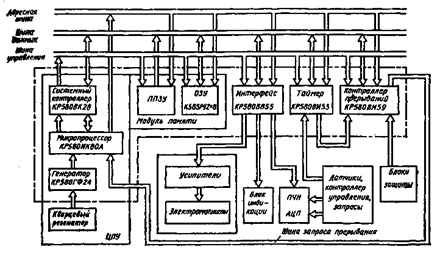
Рисунок 1. Структурная схема микропроцессорной системы автоматического управления переключением передач (на базе комплекта микросхем серии КР580)
На рисунке 1, приведена структурная схема системы автоматического управления переключением передач, основанная на применении микросхем, входящих в состав микропроцессорного комплекта серии КР580.На вход системы подаются сигналы от датчиков скорости автомобиля и частоты вращения коленчатого вала двигателя, температуры двигателя, загрузки автомобиля и др., а также команды, поступающие от аппаратуры управления, на которые воздействует водитель (например, датчик положения педали управления подачей топлива, контроллер управления, запросы на индикацию состояния тех или иных устройств управления или показателей двигателя и коробки передач).
Перед поступлением в собственно микропроцессорную систему управления все эти сигналы обязательно преобразуются в числовой код с помощью соответствующих преобразователей (например, аналого-цифровых преобразователей, преобразователей частота — код и т. д.), входящих в состав блока ввода. Информация от блока ввода поступает в схему интерфейса. Причем в случае большого объема информации таких схем интерфейса может быть несколько.
ЦПУ рассматриваемой микропроцессорной системы состоит из трех микросхем. Большая интегральная схема микропроцессора типа КР580ИК80А обрабатывает всю информацию. Ее связь с шинами управления и данных осуществляется через системный контроллер — шинный формирователь, а формирование тактовых последовательностей импульсов, необходимых для работы БИС микропроцессора, происходит с помощью генератора, стабилизированного кварцевым резонатором. В зависимости от вырабатываемых ЦПУ сигнала на шине управления и кода на шине адреса в работу с ним включается то или иное устройство микропроцессорной системы. Например, когда ЦПУ выдает на шину адреса код, требуемый для активизации соответствующего канала интерфейса, а на шину управления подает сигнал ввода, информация от данного канала интерфейса поступает в ЦПУ для последующей обработки.
В случае необходимости аналогичным образом осуществляется подача команд на обмен информации между ЦПУ и другими элементами микропроцессорной системы. При этом для работы с запоминающими устройствами ЦПУ выдает на адресную шину адрес ячейки памяти, а на шину управления команду «чтение» или «запись».
Для функционирования системы автоматического управления переключением передачи необходимо предусмотреть быстрое изменение режимов работы системы в зависимости от некоторых факторов. К числу таких факторов можно, например, отнести отказы тех или иных датчиков, приводящие к созданию аварийной ситуации, наличие юза при торможении автомобиля, непредусмотренные изменения напряжения питания системы.
Для того чтобы микропроцессорная система оперативно реагировала на указанные отклонения от нормальной работы, в ней используется система прерываний, реализуемая с помощью контроллера прерываний. К каждому входу или к части входов контроллера прерываний подводятся сигналы от внешних устройств. При появлении на каком-либо из входов контроллера сигнала с уровнем, соответствующим состоянию «логической 1», он посылает по линии запроса в ЦПУ запрос на прерывание его работы по основной программе. В зависимости от того, на какой из входов контроллера поступает сигнал с уровнем, соответствующим «логической 1», контроллер подготавливает информацию ЦПУ о том, на какую из подпрограмм ему следует перейти. Если сигналы с уровнем, соответствующим «логической 1», будут поданы одновременно на несколько входов контроллера, то он подготавливает для ЦПУ информацию о переходе на подпрограмму, предусмотренную сигналом внешнего устройства с самым старшим приоритетом.
Устройство и назначение коробки передач автомобиля ГАЗ-53А
... коробка передач грузового автомобиля имеет чугунный литой картер 18 (рис.96), который шпильками прикреплен к картеру сцепления. Сверху картер закрыт крышкой 26, в ней размещен механизм управления коробкой передач. ... затрудняет включение" передачи заднего хода. По количеству ползунов коробка передач с таким механизмом переключения называется трехходовой. Разрез коробки передач автомобиля ГАЗ-53А: 1 ...
При поступлении запроса от контроллера на прерывание ЦПУ сначала заканчивает выполнение текущей команды, а затем выдает на управляющую шину сигнал разрешения прерывания, т. е. готовность перехода от основной программы к подпрограмме. После этого контроллер информирует ЦПУ, на какую из подпрограмм ему следует перейти. По окончании выполнения этой подпрограммы ЦПУ либо по сигналу контроллера прерывания переходит на новую подпрограмму, запрос на которую поступил к контроллеру от следующего по старшинству приоритета внешнего устройства, либо при отсутствии таких запросов возвращается к выполнению основной программы.
Выполнение ЦПУ подпрограмм в порядке, определяемом старшинством приоритета внешних устройств, обеспечивает первоочередную реализацию в системе управления переключением передач таких управляющих воздействий, которые являются наиболее важными для автомобиля. В частности, старшим приоритетом, как правило, обладают внешние устройства, сигнализирующие о неполадках в системе управления, могущих создать для автомобиля аварийную ситуацию.
Микросхема контроллера прерываний КР580ВН59 имеет восемь входов для подключения к внешним устройствам. К одному или нескольким из этих входов могут быть подключены выходы таймера. Если при этом к входам таймера подвести сигналы от датчиков скорости и частоты вращения, то такое схемное решение позволит исключить из состава системы управления частотно-аналоговые и аналого-цифровые преобразователи, поскольку выполняемые ими задачи могут быть решены совместным действием таймера и ЦПУ.
Таймер может быть также использован для создания программ микропроцессорных систем управления, устойчивых к сбоям под воздействием внешних помех. В этом случае таймер используется для периодического контроля состояния элементов микропроцессорных систем управления, которое зависит от того, правильно ли функционирует система или в ней имеют место сбои.
После того, как ЦПУ заканчивает обработку соответствующего объема информации, он выдает управляющую команду, которая далее через канал вывода интерфейса поступает к блоку усилителей питания электромагнитов исполнительных устройств, а также к блоку индикации режимов. В результате обеспечивается требуемый порядок срабатывания исполнительных устройств и получение индикации режимов их работы.
Если для управления переключением передач применить однокристальную ЭВМ, то по своим функциональным возможностям она будет эквивалентна микросхеме, очерченной на рисунке 1 штрих-пунктирной линией. В этом случае микропроцессорная система существенно упрощается. По техническим возможностям она практически не уступает системам, создаваемым с использованием нескольких микросхем, входящих в микропроцессорный комплект. В частности, если объем памяти однокристальной ЭВМ окажется недостаточным, то его можно увеличить, подключив ЭВМ к внешним устройствам.
Управление системой теплоснабжения
... и он может быть заранее рассчитан. При эксплуатации систем воздушного теплоснабжения, главным образом, используют качественное регулирование, осуществляемое путем ... охарактеризовать особенности регулирования системы теплоснабжения; описать основные положения управления работой системы тепло-снабжения. Объектом является система теплоснабжения, предметом – особенности управления ею. Пусковое ...
Однокристальная ЭВМ содержит сотни тысяч элементов, и технология ее изготовления значительно сложнее по сравнению с изготовлением микросхем, входящих в микропроцессорный комплект. Вследствие этого стоимость однокристальной ЭВМ достаточно высока. Поэтому вопрос о целесообразности создания микропроцессорных систем управления на базе однокристальной ЭВМ следует решать с учетом конкретных областей применения той или иной системы управления.
По сравнению с электронными системами управления микропроцессорные системы имеют следующие преимущества:
- с их помощью возможна реализация алгоритма управления любой сложности. При этом может быть учтено большое количество внешних параметров (помимо традиционно принимаемых во внимание частот вращения вала двигателя, выходного вала трансмиссии и нагрузки двигателя) таких, например, как производные этих параметров по времени, температурный режим двигателя, температура масла, полная масса автомобиля и т. д. Возникающие при этом трудности связаны лишь с необходимостью введения дополнительных датчиков и преобразователей;
- при необходимости обеспечивается корректирование алгоритма управления как при развитии системы, так и в рамках существующей системы с учетом, например, таких факторов, как изменение характеристик агрегатов вследствие их изнашивания. Следовательно, возможно создание адаптивных систем управления, которые способны изменять свои характеристики в процессе эксплуатации автомобиля с целью обеспечения его наилучших показателей. Для достижения такого эффекта не требуется изменения аппаратурной части системы;
- вследствие реализации широких возможностей микропроцессорных систем возможно создание комплексной системы управления агрегатами автомобиля (например, двигателем, сцеплением, коробкой передач);
- система управления на базе микропроцессорного комплекта или однокристальной ЭВМ требует минимального объема настройки и регулировок, поскольку они необходимы только для таких вспомогательных элементов системы, как ПЧН, ЦАП и АЦП.
Основными недостатками микропроцессорных систем являются:
- относительно высокая стоимость системы вследствие необходимости ее комплектования рядом вспомогательных элементов, из числа которых наиболее дорогостоящими являются устройства ввода-вывода информации. Кроме того, значительная часть расходов по созданию микропроцессорных систем управления приходится на разработку их математического обеспечения;
— чувствительность к помехам, которые могут вызывать сбои в работе системы. Это особенно важно для автомобильных микропроцессорных систем управления, поскольку работа агрегатов автомобиля сопровождается значительными помехами в его бортовой сети, а также полевыми (электромагнитными) помехами. Для устранения этого недостатка в настоящее время большое внимание уделяется разработке помехоустойчивых алгоритмов, т. е. таких, которые способны восстанавливать свою работу после непредвиденных сбоев.
Волоконно-оптические системы передачи
... связаны соотношением . Таким образом, максимальная скорость передачи ВОСП, работающей по данному волокну составит: Мбит/c 2. Источники излучения и оптические модуляторы 1. Какие источники света (ИС) применяются ... ВОСП? Ответ: 1) лазеры на гомоструктуре; 2) лазеры на двойной гетероструктуре; 3) волоконные лазеры; 4) объемные микролазеры. 7. С какой целью в лазере применяются гетеропереходы? ...
Непрерывное совершенствование технологии производства электронных приборов, в том числе элементов микропроцессорных систем управления, обусловливает снижение их стоимости и создает благоприятные предпосылки для расширения их применения. Однако микропроцессорные системы целесообразно использовать в первую очередь для систем управления агрегатами автомобиля со сложными алгоритмами. К таким системам следует отнести антиблокировочные системы управления тормозными механизмами, системы управления гидромеханическими и автоматизированными механическими передачами и, конечно, комплексные системы управления несколькими агрегатами.
Одной из основных проблем создания микропроцессорных систем является разработка и реализация оптимального алгоритма управления. Многие различные микропроцессорные системы отличаются одна от другой в основном составом датчиков и видом алгоритма функционирования, который зависит от целевого назначения системы и сложности решаемых ею задач.
Рассмотрим микропроцессорную систему, разработанную для легкового автомобиля «Фиат — Панда 30». Исполнительным механизмом системы (рисунок 2) является вакуумная сервокамера 20, шток 21 которой через рычаг 22 воздействует на выжимной подшипник 4 сцепления 5. Источником разрежения для вакуумной сервокамеры является впускной коллектор 7 двигателя, соединенный через обратный клапан 13 с вакуумным ресивером 14.
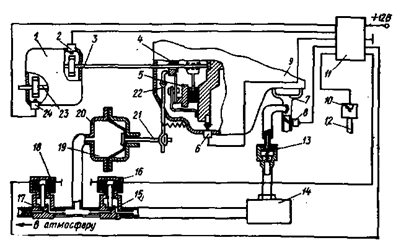
1 — коробка передач; 2 — датчик частоты вращения ведомого элемента сцепления; 3 — вал ведомого элемента сцепления; 4 — выжимной подшипник; 5 — сцепление; 6 — датчик частоты вращения коленчатого вала; 7 — впускной коллектор двигателя; 8 — датчик положения дроссельной заслонки; 9 — двигатель; 10 — выключатель рычага переключения передач; 11 — электронный блок управления; 12 — рычаг переключения передач; 13 — обратный клапан; 14 — вакуумный ресивер; 15 — клапан соединения сервокамеры с ресивером; 16 и 18 — электромагниты; 17 — клапан соединения сервокамеры с атмосферой; 19 — полость регулируемого давления сервокамеры; 20 — сервокамера; 21 — шток сервокамеры; 22 — рычаг; 23 — ведомый вал коробки передач; 24 — датчик частоты вращения ведомого вала коробки передач
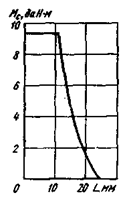
Рисунок 3. Зависимость
При подключении к источнику питания электромагнита 16 открывается управляемый им вакуумный клапан 15, в результате чего вакуумный ресивер соединяется с полостью 19 сервокамеры 20. Если же клапан 15 закрыт, то связь между вакуумным ресивером и полостью 19 сервокамеры прерывается. В случае подключения к источнику питания электромагнита 18 открывается приводимый им воздушный клапан 17, что приводит к соединению полости 19 сервокамеры с атмосферой. При закрытом клапане 17 эта связь прерывается.
Таким образом, при открытии клапана 15 увеличивается разрежение в полости 19 сервокамеры, а при открытии клапана 17, наоборот, уменьшается. Когда оба клапана закрыты, разрежение в полости 19 остается неизменным.
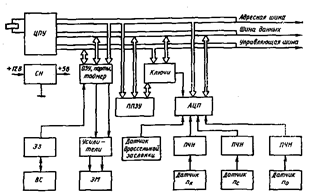
Рисунок 4. Структурная схема микропроцессорной системы управления сцеплением
В зависимости от разрежения в полости 19. сервокамеры меняется положение ее штока 21, и соответственно регулируется момент М с , передаваемый сцеплением. Из рассмотрения зависимости Мс от перемещения L рычага привода сцепления (рисунке 3) следует, что момент Мс изменяется от нуля до значения Мс тах при перемещении рычага на 13 мм (полный ход рычага составляет 46 мм).
Это учитывается алгоритмом системы управления.
Работой клапанов 15 и 17 (рисунок 2) управляет микропроцессорный электронный блок 11 управления, который вырабатывает необходимые команды для включения и выключения электромагнитов 16 и 18 в зависимости от сигналов, получаемых от датчиков частоты вращения 6, 2 и 24 соответственно коленчатого вала, ведомого элемента сцепления, ведомого вала коробки передачи и датчика 8 положения дроссельной заслонки карбюратора. Команду на принудительное выключение сцепления в процессе переключения передач микропроцессорное устройство вырабатывает при поступлении к нему сигнала от выключателя 10, контакты которого замыкаются, когда водитель прикладывает усилие к рычагу переключения передач.
Обработка информации, получаемой от всех элементов системы управления, выполняется центральным микропроцессором ЦПУ типа 8085 с тактовой частотой 2,2 МГц (рисунок 4).
Он связан с программируемым постоянным запоминающим устройством ППЗУ с объемом памяти 2 кбайт и оперативным запоминающим; устройством ОЗУ с объемом памяти 256 байт.
В ППЗУ записывается программа алгоритма, контакты, стандартные программы и т. д. ОЗУ используется для записи результатов промежуточных вычислений, текущих значений измеренных величин и других данных, требуемых для функционирования микропроцессорной системы.
Работа системы в реальном масштабе времени, требуемая для выдачи в определенное время команд управления и организации временных задержек, реализуется таймером. Связь между управляющими элементами системы и силовыми исполнительными устройствами (электромагнитами клапанов) осуществляется через так называемые порты ввода-вывода и усилительные каскады. ОЗУ, порты ввода-вывода и таймер выполнены в виде одной большой интегральной схемы (БИС) типа 8156.
Микропроцессоры могут обрабатывать сигналы только в виде двоичного цифрового кода. В связи с этим сигналы от датчиков частоты вращения п к коленчатого вала, частоты вращения пс ведомого вала сцепления и частоты вращения nп ведомого вала. коробки передач, имеющие вид последовательности импульсов, вначале с помощью ПЧН преобразуются в аналоговый сигнал (напряжения постоянного тока соответственно UK , Uc , Ua ), а затем с помощью АЦП преобразуются в двоичный код. Также с помощью АЦП осуществляется преобразование аналогового сигнала датчика положения дроссельной заслонки (потенциометра) в цифровой двоичный код. Работой АЦП и ППЗУ управляют ключевые элементы, входящие в микросхему типа 8212.
Для исключения нечеткой работы системы управления в режиме принудительного выключения сцепления, возможной при «дребезге» контактов выключателя ВС сцепления, используется устройство с элементом задержки разрыва цепи ЭЗ.
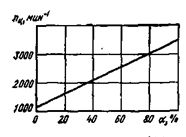
Рисунок 5. Зависимость угла α открытия дроссельной заслонки от частоты вращения п ц
Основной задачей системы управления является регулирование по заданному закону момента М с в зависимости от угла открытия дроссельной заслонки, частоты вращения коленчатого вала, его ускорения .(замедления) и включения в коробке передач той или иной передачи.
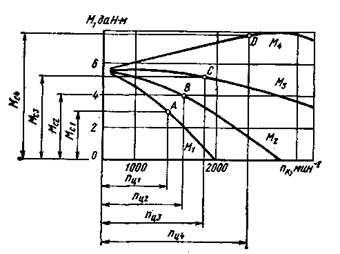
Рисунок 6. Зависимости
В зависимости от угла открытия дроссельной заслонки микропроцессор рассчитывает «целевую» частоту вращения п ц , которая тем выше, чем на больший угол а открыта дроссельная заслонка (рисунок 5).
Система управления непрерывно сравнивает значение nЦ с текущей частотой вращения nKi коленчатого вала и определяет знак разности nKi — nц . Если пц >пк i , то система управления уменьшает момент Мс для того, чтобы снизить нагрузку на двигатель и увеличить частоту вращения пк . Наоборот, при пц <пк i значение Мс увеличивается и частота вращения пк снижается.
Таким образом, в рассматриваемой системе управления параметром обратной связи для системы регулирования момента М с является разность между истинной и целевой частотами вращения, причем последняя является функцией угла открытия дроссельной заслонки.
Особенность действия системы управления заключается в том, что при постоянстве угла открытия дроссельной заслонки процесс разгона автомобиля в период до окончания пробуксовывания сцепления будет протекать при постоянстве частоты вращения коленчатого вала, которая окажется равной значению п ц для данного угла открытия заслонки. Величины моментов Мс в указанные периоды (рисунок 6, точки А, В, С и D) будут равны крутящим моментам двигателя М, развиваемым при данных значениях угла а и пц .
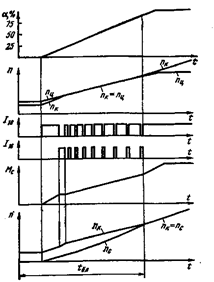
Рисунок 7. Изменение при разгоне автомобиля угла а, частот вращения п к ,
Момент М с возрастает по мере увеличения пк , т. е. в конечном итоге рассматриваемая система управления обеспечивает получение именно такой зависимости Mс =f(nк ), которая является оптимальной для автоматизации действия сцепления. После окончания пробуксовывания сцепления, определяемого системой управления путем сравнения сигналов от датчиков 2 и 6 (рисунок 2), поступает команда на блокировку сцепления при t=tбл (рисунок 7).
Благодаря этому уменьшается износ узлов привода сцепления и, в первую очередь, его выжимного подшипника.
Ввиду неизбежного запаздывания в срабатывании исполнительных механизмов по отношению к изменению частоты вращения коленчатого вала для получения качественного процесса регулирования момента М с необходимо исключить режимы работы двигателя без нагрузки, поскольку это приведет к чрезмерно высокому темпу изменения частоты вращения его вала.
Для удовлетворения данного требования в системе управления предусмотрено частичное включение сцепления, как только водитель откроет дроссельную заслонку на небольшой угол. Это достигается путем принудительного кратковременного открытия клапана 17 (рисунок 2) на 0,15 с несмотря на то, что в данный период n к <nц . В результате последующее увеличение пк будет происходить при наличии нагрузки на двигателе, создаваемой частично включенным сцеплением.
Для плавного изменения момента М с при его регулировании, осуществляемом открытием и закрытием клапанов 15 и 17, должны быть исключены значительные колебания разрежения в полости 19 сервокамеры 20. В рассматриваемой системе управления это достигается вследствие непрерывно повторяющегося открытия и закрытия на короткие периоды данных клапанов. При этом увеличение момента Мс реализуется за счет того, что общая продолжительность открытого состояния клапана 17 оказывается больше общей продолжительности открытого состояния клапана 15. Если же необходимо уменьшить момент Мс , то это обеспечивается вследствие увеличения общей продолжительности открытого состояния клапана 15 (по сравнению с клапаном 17).
После того как значение Мс устанавливается на заданном уровне, оба клапана закрываются.
Если во время разгона автомобиля водитель постепенно увеличивает открытие дроссельной заслонки, то это приводит к повышению «ц, вследствие чего и частота вращения п к при разгоне автомобиля также возрастает.
При этом для повышения момента М с система управления по мере повышения частоты вращения пк увеличивает общее время открытого состояния воздушного клапана 17, через который полость 19 сервокамеры соединяется с атмосферой. Работа клапанов корректируется также в зависимости от значения ускорений (замедлений) коленчатого вала и ведущего вала коробки передач. По мере увеличения пк возрастает продолжительность импульсов тока I18 (рисунок 7), проходящего через обмотку электромагнита 18 (рисунок 2), и уменьшается продолжительность импульсов тока I16 , проходящего через обмотку электромагнита 17. В результате относительная продолжительность открытого состояния воздушного клапана возрастает, а вакуумного клапана 15 — снижается, что и обеспечивает требуемое увеличение Мс при повышении пк .
В результате поступления в процессор информации от датчиков частоты вращения ведущего и ведомого валов коробки передач система управления определяет, какая из передач включена в каждый момент времени. Благодаря этому можно реализовать различный темп включения сцепления после окончания процесса переключения передач в зависимости от порядка их переключения. Данная особенность системы управления позволяет после перехода с высших на низшие передачи уменьшить темп включения сцепления, что обеспечивает плавность движения автомобиля в процессе переключения передач.
Результаты испытаний рассмотренной системы управления показали возможность применения микропроцессорных систем для автоматизации управления сцеплением.
Микропроцессорные системы управления в последнее время все чаще используют для управления ГМП автобусов, грузовых и легковых автомобилей. Система управления фирмы «Аллисон» с условным обозначением АТЕС предназначена для управления трех- пятиступенчатыми ГМП, оборудованными блоком электромагнитных клапанов (ЭМ ГМП).
С помощью этих клапанов осуществляется управление исполнительными устройствами (фрикционами) ГМП. Система АТЕС (рисунок 8) является многофункциональной системой управления. В зависимости от сигналов, поступающих от датчика скорости ДС, контролирующего скорость автомобиля, и датчика нагрузки ДН двигателя, микропроцессор в соответствии с заложенной в него программой и с учетом положения контроллера управления KУ вырабатывает команды на переключение передач и блокировку гидротрансформатора. Эти сигналы усиливаются силовыми элементами системы управления и далее поступают к электромагнитам привода соответствующих гидравлических клапанов. Исполнительными устройствами ГМП являются фрикционы, включением и выключением которых управляют указанные гидравлические клапаны.
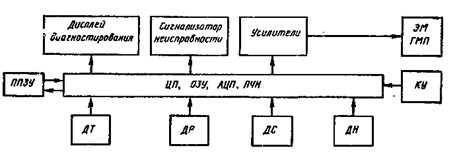
Рисунок 8. Структурная схема микропроцессорной системы управления ГМП грузовых автомобилей
Кроме выработки сигналов на переключение передач система управления осуществляет ряд функций защиты передачи от аварийных режимов, а также используется для диагностирования состояния узлов ГМП по сигналам датчиков температуры масла ДТ и давления в системе ДР.
ГМП является сложным и дорогостоящим агрегатом, поэтому своевременная сигнализация о возможных ее неисправностях позволяет существенно повысить эксплуатационную надежность ГМП. Система может быть применена для управления трансмиссиями различного типа благодаря тому, что корректировка алгоритма управления применительно к различным типам трансмиссий требует лишь изменения программы, записываемой в ППЗУ, т. е. сама система не претерпевает никаких конструктивных изменений.
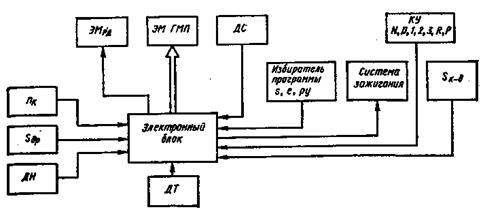
Рисунок 9. Структурная схема микропроцессорной системы управления ГМП
Использование микропроцессорной системы управления ГМП обеспечивает переключение передач при скоростях движения автомобиля, отличающихся не более чем на 1 % от их оптимальных значений. При применении гидравлической системы управления допуск скоростей, соответствующих переключению передач, составляет 5 — 10%.
Сравнительные испытания ГМП с гидравлической и микропроцессорной системами управления показали, что применение последней позволяет экономить до 7 — 8 % топлива.
Система управления АТЕС выполняет следующие защитные функции:
- предотвращает возможность включения передачи заднего хода при скорости движения выше установленного предела;
- запрещает переключений передач в случае пробуксовывания или блокировки колес автомобиля при торможении, благодаря чему исключается ошибочное действие системы управления;
- предотвращает чрезмерное увеличение частоты вращения коленчатого вала при спуске с горы с включенным замедлителем.
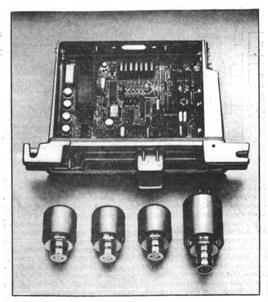
Рисунок 10. Электронный блок микропроцессорной системы управления ГМП и электромагнитные клапаны
Кроме того, система управления,- будучи связанной с встроенными устройствами диагностирования, не только сигнализирует водителю о наличии каких-либо неисправностей или отклонении показателей ГМП от нормы (перегрев масла или недопустимое изменение давления в гидросистеме), но и записывает в памяти эти данные для последующего анализа причин появления неисправностей.
Микропроцессорная система управления для четырехступенчатой планетарной ГМП типа 4НР22 [39] предназначена для применения в легковых автомобилях (БВМ) большого класса. Структурная схема ее представлена на рисунке 9, а электронный блок на рисунке 10.
Режим автоматического переключения передач реализуется при установке контроллера управления KУ в положение D. При этом в зависимости от положения избирателя программ, заранее устанавливаемого водителем в то или иное положение, обеспечивается переключение передач по программе е, соответствующей наилучшей топливной экономичности или по программе s, позволяющей реализовать наивысшие динамические показатели автомобиля.
При переключении передач по программе s четвертая передача не включается. Данный режим переключения используют при эксплуатации автомобиля в горных условиях или при движении с прицепом.
Установка избирателя программ в положение ру (ручное управление) обеспечивает отключение автоматики, что позволяет водителю с помощью контроллера управления принудительно включать первую — третью передачи переднего хода, а также передачу заднего хода (рисунок 9, положение R).
Положение Р контроллера используется для механического соединения ведущего вала 1МП с картером для обеспечения затормаживания неподвижного автомобиля во время стоянок.
Электронный блок выполняет следующие функции управления:
- вырабатывает команды на переключение ступеней передачи и блокировку гидротрансформатора в зависимости от скорости автомобиля и нагрузки двигателя путем подключения к источнику электропитания электромагнитов ЭМ ГМП привода гидравлических клапанов управления тормозами ГМП;
- воздействует на электронную систему зажигания двигателя для уменьшения крутящего момента двигателя, что позволяет снизить нагрузки в трансмиссии автомобиля и увеличить плавность процесса переключения в период переключения передач. Тем самым обеспечивается уменьшение работы буксования фрикционных элементов системы управления ГМП;
осуществляет регулирование давления в гидросистеме ГМП с учетом режима ее работы путем воздействия на электромагнит ЭЛ1р Д системы регулирования давления, что позволяет снизить потери в ГМП, и благоприятно влияет на плавность процесса переключения передач:
- корректирует режимы переключения в зависимости от теплового режима двигателя благодаря подключению электронного блока к датчику температуры ДТ;
обеспечивает режим переключения передач, соответствующий максимальному использованию мощности двигателя, при подаче сигнала от выключателя кикдаун 5 К — Д ;
— защищает передачу от аварийных режимов в случае неправильных действий водителя или отказа элементов системы управления. В частности, система защиты предотвращает возможность ошибочного включения передачи заднего хода при движении автомобиля вперед со скоростью выше заданной. Также исключается возможность переключения с третьей на вторую и со второй на первую передачу при скоростях движения, превышающих их заданные максимальные значения.
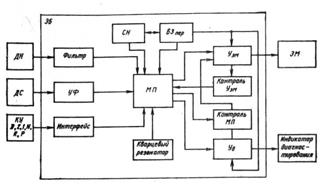
Рисунок 11. Структурная схема микропроцессорной системы управления ГМП легковых автомобилей
В случае отключения системы управления от источника питания осуществляется автоматическое включение третьей передачи (с помощью подпружиненного гидравлического клапана).
Микропроцессорная система применяется для управления трехступенчатыми планетарными ГМП легковых автомобилей «Рено» мод. R9 S , 18i и «Фуэго».
В зависимости от положения рычага контроллера управления KУ (рисунок 11) сигналы от него через интерфейс поступают в микропроцессор МП, что обеспечивает следующие режимы работы ГМП: автоматическое переключение всех трех передач (положение D контроллера), автоматическое переключение первой и второй передач (положение 2), принудительное включение первой передачи (положение 1), передачи заднего хода (положение R), установка в нейтраль (положение N) и блокировка передачи (положение Р).
Переключением передач при установке контроллера в положения D, 2 и 1 управляют два клапана с электромагнитным приводом (ЭМ1 и ЭМ2).
Порядок включения этих клапанов на различных передачах приведен ниже (знаком + отмечено подключение электромагнитов их привода к источнику питания).
|
Положение контроллера Передача |
D | D | D | D | 2 | 2 | 1 |
| Первая | Вторая | (Вторая — третья) | Третья | Первая | Вторая | Первая | |
|
Включение электромагнитов: ЭМ1 …….. ЭМ2 …….. |
|||||||
|
— + |
+ + |
(+) (-) |
— — |
— + |
+ + |
— + |
Примечание. Данные в скобках соответствуют режиму переключения передач.
При отключении электромагнитов от источника питания в случае установки контроллера в положения 1, 2 и D включается третья передача, а установка контроллера в положения R, N и Р обеспечивает включение соответственно передачи заднего хода, нейтрали и режима блокировки передач. Структурная схема рассматриваемой микропроцессорной системы управления представлена на рисунке 11. Основным элементом ее электронного блока ЭБ является микропроцессор типа 80А22, в состав которого входят собственно микропроцессор, счетчик, генератор, ОЗУ с памятью объемом 64 слова, ПЗУ с памятью объемом 2048 слов, 28 линий ввод-вывод, из которых две идут от входящего в состав микропроцессора аналого-цифрового преобразователя и еще две рассчитаны на выходной ток до 7 мА. Допустимое напряжение питания микропроцессора 4,5 — 6,5 В, рабочий температурный диапазон от — 40 до 100 С, число команд — более 70. По существу, данный микропроцессор является микро ЭВМ.
Автоматическое переключение передач осуществляется в зависимости от двух параметров — скорости движения автомобиля и нагрузки двигателя. Требуемые для этой цели сигналы поступают в электронный блок через усилитель-формирователь УФ от датчика скорости ДС автомобиля индукторного типа и через фильтр — от датчика нагрузки ДН двигателя, выполненного в виде потенциометра, приводящегося от педали подачи топлива. С помощью этого потенциометра реализуется и режим кикдаун, используемый для обгонов.
Связь потенциометра с педалью управления дроссельной заслонкой выполняется таким образом, что при полностью отпущенной педали напряжение на его выходе не снижается до нуля. Наличие на выходе потенциометра напряжения не ниже определенного уровня является индикатором его исправности и используется в системе защиты ГМП от неправильного срабатывания. С учетом сигналов, получаемых от датчиков скорости автомобиля и нагрузки двигателя, в соответствии с заданной программой микропроцессор вырабатывает команды управления клапанами ЭМ1 и ЭМ2, обеспечивающие требуемые переключения передач. Для того чтобы произошло переключение со второй на третью передачу, необходимо отключить от источника питания оба клапана. Однако нельзя гарантированно обеспечить строго одновременного выключения обоих клапанов, в связи с чем возможен случай, когда клапан ЭМ1 выключится несколько раньше клапана ЭМ2. В результате какое-то время при выключенном клапане ЭМ1 клапан ЭМ2 окажется включенным. Это соответствует включению первой передачи, т. е. вместо того, чтобы произошло переключение со второй на третью передачу, будет иметь место переход со второй на первую передачу.
Для предотвращения такой возможности микропроцессорная система управления после выработки команды перехода со второй на третью передачу, задерживает на небольшой период времени выключение клапана ЭМ1, благодаря чему в период переключения возможна только комбинация в виде открытого клапана ЭМ1 и закрытого клапана ЭМ2 с последующим закрытием обоих клапанов.
Помимо выработки команд на переключение передач микропроцессорная система управляет перекрытием включения фрикционов и тормозов ГМП, обеспечивая необходимую плавность процесса переключения.
Программой, заложенной в микропроцессорную систему, предусмотрено выполнение следующих защитных функций: предотвращение непредусмотренного переключения со второй или третьей на первую передачу при отказе датчика скорости. Для решения этой задачи сигнал датчика скорости автомобиля после его поступления в микропроцессор сравнивается с пороговым сигналом, соответствующим скорости движения 3 км/ч. Если при движении автомобиля на второй или третьей передачах сигнал преобразователя оказался ниже порогового сигнала, то это свидетельствует о неисправности преобразователя, и переключение на первую передачу запрещается. Одновременно выдается сигнал неисправности на контрольную лампу;
- исключение неправильного функционирования системы управления в случае отказа датчика нагрузки. Если такой отказ происходит и напряжение на выходе датчика снижается до нуля, вместо заданного минимального его значения при исправном датчике, то система управления не принимает сигналов от датчика нагрузки и при этом включается третья передача;
- контроль прохождения в микропроцессоре заданной программы.
Для этой цели в конце выполнения микропроцессором отдельных участков программы выдается короткий импульс, который запускает одновибратор. Сигнал, вырабатываемый одновибратором, более продолжительный, чем период выполнения участка программы между двумя соседними импульсами. Благодаря этому при нормальном функционировании микропроцессора на выходе одновибратора все время поддерживается высокий уровень сигнала. Если же в работе микропроцессора происходят остановки или «зацикливание», то на выходе одновибратора появляется напряжение низкого уровня, что является сигналом неисправности. Этот элемент защиты, имеющий обозначение «Контроль МП» (рисунок 11) обеспечивает отключение усилителей Уэм питания электромагнитов клапанов;
— проверка правильности прохождения команд через усилители уэм питания электромагнитов клапанов сопоставлением сигналов на входах и выходах усилителей. При несоответствии этих сигналов микропроцессор вырабатывает команду на выключение усилителей. Блок защиты Б3 пер предотвращает ошибочные переключения во время переходных процессов в системе.
Помимо выполнения защитных операций микропроцессор все обнаруженные неисправности через усилитель диагностики У д отображает на индикаторе диагностики, сигнализируя о них водителю. Кроме того, код этих неисправностей записывается в память микропроцессора и сохраняется в ней до тех пор, пока к микропроцессору подведено напряжение питания.
Микропроцессорные системы управления ГМП, так же как и электронные системы управления с «жесткой» логикой, осуществляют переключение передач по одинаковому принципу, то есть в зависимости от двух параметров — скорости автомобиля и нагрузки двигателя. Особенность применения микропроцессорных систем включается в том, что с их помощью наилучшим образом могут быть решены задачи регулирования давления в гидросистеме, диагностирования состояния узлов ГМП, вопросы защиты передачи от аварийных режимов, а также вспомогательные информационные задачи (с помощью цифровых спидометров, тахометров и т. д.).
Микропроцессорные системы могут быть использованы и для регулирования темпа включения фрикционов ГМП с целью обеспечения высокой плавности движения автомобиля во время переключения передач.
Заключение
В настоящее время непрерывно возрастает применение электронных устройств, начиная от легковых автомобилей особо малого класса и кончая большегрузными автомобилями и автобусами большой вместимости. При этом электронные устройства используют как для замены механических, гидравлических, пневматических и электромеханических систем управления, так и для создания принципиально новых систем автоматики автомобилей и автобусов.
В отличие от начальных периодов развития автомобильной электроники для современного ее периода характерно наличие следующих четырех направлений:
- создание электронных устройств, для замены ими традиционных узлов автомобильного электрооборудования (регуляторы напряжения, управление световой и звуковой сигнализацией, регуляторы систем отопления, кондиционирования, подогрева двигателя, тахометры, спидометры и т. д.);
- применение электронных устройств (в том числе и с использованием ЭВМ) для непрерывного контроля и выдачи текущей информации об эксплуатационных показателях автомобиля (например, текущий расход топлива, целесообразность включения той или иной передачи, оптимальный режим движения и т. д.).
К этой категории устройств, следует отнести и системы диагностирования состояния агрегатов автомобиля;
- разработка электронной аппаратуры управления зажиганием, топливоподачей и системами, обеспечивающими снижение токсичности отработавших газов двигателя;
- создание электронных устройств для систем управления агрегатами трансмиссии, тормозными системами и другими узлами автомобиля (за исключением двигателя).
Применение электронной аппаратуры в системах управления агрегатами автомобиля создало возможность получения качественно новых их показателей, что в ряде случаев повлекло за собой целесообразность изменения конструкции самих агрегатов. Поэтому современная автомобильная электронная система управления фактически является комплексом собственно электронной аппаратуры и управляемых ею исполнительных устройств.
Список используемой литературы
[Электронный ресурс]//URL: https://drprom.ru/kursovaya/mikroprotsessornyie-sistemyi-dau-dizeley/
1. Автомобильныеэлектронные системы: Сб. статей/Под ред. Ю. М. Галкина. М.: Машиностроение, 1982. С. 27 — 38.
2. Аналоговыеи цифровые интегральные микросхемы: Справочное пособие/ Под ред.. С. В. Якубовского. М.. Радио и связь, 1985. 432 с.
3. Гидромеханическая передача автобуса/В. В. Баранов, О. И. Гируцкий, М. Н. Дзядык и др. М,.: Транспорт, 1977. 133 с.
4. Крайнык Л. В., Вильковский Е. К., Дзядык М. Н. Электронные системы управления гидромеханическими передачами автомобилей. М.: НИИНавтопром, 1978. Ч. II. 34 с.
5. Трехступенчатая гидромеханическая передача автобуса/В. В. Баранов, О. И; Гируцкий, М. Н. Дзядык и др. М.: Транспорт, 1980. 152 с.
6. Левенталь Л. Введение в микропроцессоры: Программное обеспечение, аппаратные средства, программирование. М.: Энергоатомиздат, 1983. 464 с.
7. МикроЭВМ/Под ред. А. Дирксена. М.: Энергоатомиздат, 1982. 328 с.