
Дискретные системы отличаются от непрерывных тем, что среди сигналов, действующих в системе, имеются дискретные сигналы. Дискретные сигналы получаются из непрерывных квантованием по уровню, по времени или одновременно и по уровню, и по времени. Системы, в структуре которых используются цифровые устройства, контроллеры, микропроцессоры, ЭВМ, являются дискретными.
Дискретные системы (ДС) находят широкое применение в управлении разнообразными техническими устройствами. Область применения ДС — управление различными электромеханическими и электромагнитными устройствами, системами телеизмерения и телеуправления, многоканальными системами связи, системами радиоуправления и т. д.
В современных условиях сохраняется устойчивая тенденция увеличения доли цифровых методов преобразования, обработки, передачи и хранения информации во всех сферах деятельности человека, идёт смена поколений технических средств обработки информации и информационного обмена. Эти средства могут непосредственно не затрагивать традиционные области автоматизации: датчики, приводы, регуляторы, однако меняют среду существования средств автоматизации в целом.
В период бурного развития микропроцессорной техники (80-е годы 20-го века) было разработано и внедрено огромное количество технических устройств для систем автоматического управления с жёсткой логической структурой, обладавших вполне удовлетворительными характеристиками. Вместе с тем становилось ясно, что только использование перепрограммируемых и универсальных устройств обеспечит будущее технических средств автоматики. На этом этапе произошло разделение путей развития систем управления на две линии: на основе универсальных ЭВМ, и на основе контроллеров и более простых ЭВМ, но зато оптимизированных для требуемой задачи. Оба подхода получили право на жизнь, а их разумное сочетание обеспечивает высокое качество систем автоматического управления (САУ).
Современные проекты объединяет широкое использование готовых аппаратных и программных технологий открытого типа, апробированных и стандартизованных на рынке общепромышленных гражданских приложений, наряду с развитием и совершенствованием традиционных средств автоматизации. Контроллеры средств автоматизации обычно вынуждены работать в жёстких условиях эксплуатации, а цена сбоя в системе автоматического управления также может быть гораздо выше, чем в других информационных системах, так как объект управления нуждается в управлении постоянно и в реальном времени.
Автоматизация системы отопления и горячего водоснабжения
... вспомогательного оборудования, средств автоматизации; - Разработать электрические схемы подключения устройств котельной Рисунок 1.1 - Функциональная схема автоматизации ИТП Функциональная схема автоматизации процесса работы ИТП системы отопления представлена на рисунке 1.1 Система управления АСУ ПТВМ ...
В САУ обычно имеется большое количество разнообразных датчиков и преобразователей информации физических величин, таких, как температура, давление, расход жидкостей, скорость и т.п. Датчики преобразуют исходную физическую величину в некоторую стандартную величину, например, напряжение. При использовании в САУ ЭВМ встаёт задача преобразования этой промежуточной величины в цифровую форму, появилось и стремительно развивается новое поколение датчиков, в которых имеются встроенные контроллеры, осуществляющие такое преобразование. Такой интеллектуальный датчик сам становится элементом вычислительной сети, поддерживающим сетевой протокол и передающим данные в цифровой форме. Часто в контроллере такого датчика производится предварительная цифровая обработка сигнала, например, коррекция систематической погрешности преобразователя, предварительная фильтрация случайных помех, а также контроль работоспособности. Всё больше технических средств САУ становятся чисто цифровыми, в которых преобразование физических данных происходит непосредственно в цифровую форму, подготовленную к передаче по каналу связи.
Цифровыми и интеллектуальными (со встроенными микроконтроллерами) в САУ могут быть и другие составные части: исполнительные устройства, каналы связи, задатчики воздействий, фильтры и т.п. Кроме перепрограммируемости, это даёт повышение надёжности за счёт гибкости конфигурации. Количество компьютеров, используемых для управления процессами производства и в задачах управления, нарастает практически экспоненциально.
5.1. ДИСКРЕТНЫЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ [10, 11, 12].
Особенности дискретного управления.
Современная теория управления располагает универсальным методом исследования дискретных систем на основе специального математического аппарата — дискретного преобразователя Лапласа, который позволил максимально приблизить методологию исследования ДС к методологии исследования непрерывных систем. Однако работа ДС связана с квантованием непрерывных сигналов и теория управления дискретными системами имеет особенности, обусловленные наличием в этих системах импульсных элементов.
При квантовании по уровню непрерывный сигнал х(t) преобразуется в последовательность дискретных сигналов, фиксированных в произвольные моменты времени при условии Dx = const. Системы, в которых используются сигналы, квантованные по конечному числу уровней (часто 2-3 уровня), называются релейными системами. Квантование по уровню является нелинейным преобразованием сигналов, следовательно, релейные системы относятся к классу нелинейных систем.
При квантовании по времени сигналы фиксируются в дискретные моменты времени Dt = const. При этом уровни сигнала могут принимать произвольные значения. Системы, реализующие квантование сигналов по времени, называются импульсными системами (ИС).
Квантование по времени осуществляется импульсным элементом, который в частном случае пропускает входной сигнал х(t) лишь в течение некоторого времени.
При квантовании по уровню и по времени непрерывный сигнал заменяется дискретными уровнями, ближайшими к значениям непрерывного сигнала в дискретные моменты времени Dt = const. Дискретные системы, реализующие сигналы, квантованные по уровню и по времени, называются релейно-импульсными, или цифровыми. В этих системах квантование по уровню и по времени осуществляется кодоимпульсным модулятором или цифровым вычислительным устройством.
Решетчатой функцией
Отсчеты по шкале времени удобно вести в целочисленных единицах периода квантования Т. С этой целью вместо переменной t непрерывной функции введем новую переменную t=t/T, при этом непрерывной функции x(t) будет соответствовать решетчатая функция х(n) º x n .
Импульсная модуляция.
Если по закону изменения модулирующей величины изменяется амплитуда импульсов, то модуляция называется амплитудно-импульсной (АИМ), если изменяется ширина — широтно-импульсной (ШИМ), при изменении периода — временно-импульсной модуляцией (ВИМ).
|
Рис. 5.1.1. |
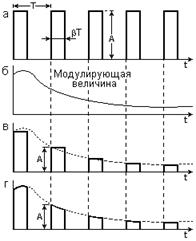
Вид модуляции, при которой параметры последовательности импульсов изменяются в зависимости от значений модулирующей величины в фиксированные равноотстоящие друг от друга моменты времени, называется импульсной модуляцией первого рода (рис. 5.1.1, в).
В этом случае модулируемый параметр амплитуда, ширина или частота импульса, определяется значением модулирующей величины в равноотстоящие дискретные моменты времени.
Вид модуляции, при которой модулируемые параметры последовательности импульсов изменяются в соответствии с текущим значением модулирующей величины, называется импульсной модуляцией второго рода (рис. 5.1.1, г).
В этом случае модулируемый параметр изменяется в течение времени существования импульса.
Параметры импульсных элементов
Коэффициент усиления
Период повторения импульсов
Длительность импульсов
Форма импульса
Характеристика импульсного элемента
Импульсные элементы разнообразны по конструкции (механические, электромеханические, фотоэлектрические, электронные).
В качестве импульсного элемента может быть как простейший ключ, так и любое сложное устройство, например, контроллер. Наиболее широкое применение на практике получили амплитудные импульсные элементы, осуществляющие амплитудно-импульсную модуляцию первого и второго рода. В дальнейшем будем рассматривать, в основном, импульсные системы с амплитудными импульсными элементами первого рода.
Импульсные системы также могут быть линейными и нелинейными. В линейных ИС соблюдается принцип суперпозиции: реакция ИС на сумму воздействий равна сумме реакций на каждое воздействие в отдельности. В этих системах параметры импульсного элемента не зависят от внешних воздействий и переменных, характеризующих состояние системы. К линейным ИС относятся, например, амплитудно-импульсные системы с линейной непрерывной частью и с линейной характеристикой импульсного элемента. В дальнейшем будут рассматриваться линейные импульсные системы, в которых ИЭ может быть включен до непрерывной части, после нее или между отдельными частями непрерывной системы. В замкнутых ИС импульсный элемент может находиться в прямой части системы, в цепи обратной связи или вне замкнутого контура.
САУ с цифровыми ЭВМ или цифровыми вычислительными устройствами (ЦВУ) называются цифровыми системами автоматического управления, или цифровыми автоматическими системами (ЦАС).
Функциональные схемы цифровых систем.
|
Рис. 5.1.2. |
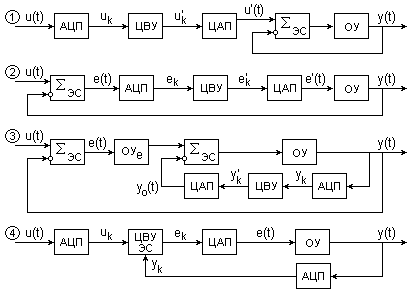
В системах первого типа (ЦВУ вне замкнутого контура управления, рис. 5.1.2-1) с помощью аналогово-цифрового преобразователя (АЦП) непрерывное (аналоговое) воздействие u(t) преобразуется в цифровой код u k . ЦВУ на основании поступающей информации вырабатывает оптимальное задающее воздействие u’k . Последнее с помощью цифро-аналогового преобразователя (ЦАП) преобразуется в непрерывный сигнал u'(t) и поступает на элемент сравнения (ЭС) замкнутой системы, сигнал которого поступает на вход объекта управления (ОУ).
Замкнутый контур системы может быть непрерывным либо импульсным. Достоинство такой ЦАС состоит в простоте изменения программы ЦВУ, в соответствии с которой вырабатывается задающее воздействие.
В системах второго типа (ЦВУ в контуре управления, рис. 5.1.2-2) вычислительное устройство, включенное в прямую цепь замкнутого контура системы, выполняет функцию последовательного корректирующего устройства. В системах третьего типа (рис. 5.1.2-3) ЦВУ включено в цепь местной обратной связи, охватывающей непрерывную часть ОУ системы, и является параллельным корректирующим устройством. Цифровые корректирующие устройства в этих системах позволяют реализовать сложные алгоритмы управления.
В системах четвертого типа (рис. 5.1.2-4) ЦВУ выполняет функции элемента сравнения и корректирующего устройства. В этой системе на цифровой элемент сравнения задающее воздействие u k и управляемая величина yk поступают в цифровой форме через соответствующие АЦП. На выходе элемента сравнения сигнал рассогласования также получается в виде кода ek . С помощью преобразователя ЦАП цифровой код преобразуется в непрерывный сигнал e(t), поступающий на ОУ системы. ЦАС четвертого типа обладает всеми качествами первого, второго и третьего типов, а благодаря более высокой разрешающей способности элемента сравнения обладает более высокой точностью.
Преобразователи АЦП
В качестве входных аналоговых величин обычно действуют временные интервалы, углы поворота, электрические напряжения или токи, частота колебаний, фазовые сдвиги. Важной характеристикой АЦП является количество каналов, определяющее максимальное число датчиков аналоговых величин, которые могут быть одновременно подключены к преобразователю.
Из множества применяемых преобразователей можно выделить три основных группы:
1) преобразователи пространственных перемещений и углов поворота в цифровой код;
2) преобразователи электрических величин (напряжений, токов, и др.) в код;
3) преобразователи интервалов времени в цифровой код.
Преобразователи угол-код
Преобразователи угол — код с обычной двоичной кодовой шкалой, как правило, не применяются, так как имеется вероятность появления ошибок считывания из-за того, что в двоичной системе счисления при переходе от одного числа к другому могут меняться цифры сразу в нескольких разрядах. Для устранения этого недостатка применяются диски с масками специальных кодов — двоичного кода Грея или двоично-сдвинутого кода Баркера, ошибки считывания в которых не превышают единицы младшего разряда.
В преобразователях последовательного счета угол поворота вала преобразуется в количество импульсов. Для этого используется закрепленный на валу диск или барабан с метками регистрирующих датчиков (контактных, фотоэлектрических, и др.).
При повороте диска в считывающем устройстве формируются импульсы, число которых зависит от угла поворота вала и плотности меток. Широкое применение имеют также преобразователи, работающие по методу счета, осуществляющие последовательное преобразование угол → временной интервал → код.
Преобразователи напряжения в цифровой код
Для преобразователей, работающих по принципу последовательного счета характерно промежуточное преобразование измеряемого напряжения в пропорциональный временной интервал, который заполняется импульсами генератора определенной частоты, число которых переводится в кодовую форму. В преобразователях, работающих по принципу сравнения, входное напряжение сравнивается с эталонным, формируемым через ЦАП от счетчика выходного кода.
Преобразователи ЦАП
Для преобразования цифрового кода в напряжение используются сопротивления, соединенные с кодовым счетчиком по определенной схеме, включение которых на источник эталонного напряжения происходит в соответствии с декодируемым числом, при этом выходное напряжение, снимаемое с нагрузки, пропорционально декодируемому числу. Основным типом преобразователей код-напряжение являются преобразователи с суммированием напряжений на аттенюаторе сопротивлений. Чтобы преобразовать числа разных знаков, необходимо на входе схемы установить знаковый триггер, а на выходе схемы предусмотреть возможность получения напряжения разной полярности. Преобразователи обладают высоким быстродействием, достаточной точностью (точность преобразования может быть доведена до 0,05… 0,1 %), имеют сравнительно простую схему и обеспечивают пропорциональное преобразование кодов с числом разрядов n ≤ 10, что вполне достаточно для цифровых автоматических систем.
5.2. ЦИФРОВЫЕ СРЕДСТВА ОБРАБОТКИ ИНФОРМАЦИИ В СИСТЕМАХ [10, 11]
Многие задачи требуют формирования таких сложных законов управления объектами, которые не могут быть реализованы традиционными элементами и устройствами автоматики. Так, например, в системах управления движущимися объектами требуются сложные вычисления с преобразованием координат, решением прямоугольных и сферических треугольников, счислением пути и т. п. Очень сложные вычисления производятся в адаптивных системах управления. Эти задачи решаются с помощью средств вычислительной техники, вводимых в контур управления динамической системой.
По принципу действия электронно-вычислительные машины, используемые в системах управления, разделяются на два типа: аналоговые (АВМ) и цифровые (ЭВМ).
Аналоговые электронно-вычислительные машины
Конструктивно АВМ собирается в виде совокупности решающих блоков, организованных в вычислительную систему с помощью электрических связей так, что результат математической операции передается с выхода одного блока на входы других. Результат решения задачи на АВМ можно измерять, регистрировать с помощью записывающих приборов, наблюдать на экранах осциллографов.
Обычный состав АВМ включает в себя следующие функциональные части: операционные усилители, наборное поле, устройства управления, измерительную и регистрационную аппаратуру, источники питания. Имея практически одинаковый набор устройств различных типов, АВМ отличаются количеством операционных блоков, определяющим возможности машины, которые выражаются в основном в порядке дифференциальных уравнений, решаемых на АВМ. По этому признаку АВМ подразделяются на три класса: малые (до 20 операционных блоков), средние (20—60 блоков) и большие (свыше 60 блоков).
Недостатком АВМ является ограниченная точность решения задач и отсутствие устройств памяти для хранения больших объемов информации. Широкое внедрение цифровых электронно-вычислительных машин существенно снизило область применения и масштабы использования АВМ. Тем не менее, в сфере управления техническими системами и технологическими процессами роль АВМ достаточно велика. Эти машины проще, чем ЭВМ, работают в реальном масштабе времени и без проблем сопрягаются с элементами непрерывных автоматических систем.
Цифровые электронно-вычислительные машины
В практике управления используются ЭВМ различных типов, которые подразделяются на три вида: большие ЭВМ, малые или мини-ЭВМ, и микроЭВМ. Все они имеют общие принципы работы. Структура ЭВМ обусловлена содержанием процесса обработки информации, включающем следующие основные операции: подготовка данных для ввода в вычислительную машину, ввод исходных данных, собственно вычисления и решение задач, вывод результатов решения. Соответственно, ЭВМ включает следующие основные элементы: процессор, оперативное запоминающее устройство (ОЗУ), внешние запоминающие устройства (ВЗУ), устройства ввода и вывода.
Процессор
ОЗУ составляет оперативную память ЭВМ, в которой хранится информация. Информация из ОЗУ в виде команд программы и исходных операндов передается в АЛУ. Из процессора в ОЗУ передаются конечные и промежуточные результаты преобразования информации.
ВЗУ — внешняя память ЭВМ, в качестве которой используются накопители на различных физических носителях долговременного хранения информации с возможностью оперативной записи и считывания.
Информация в ЭВМ хранится в двоично-кодированном виде, в двоичной системе счисления. Двоичная система счисления позволяет сравнительно просто обеспечить технически выполнение вычислительных операций. Выполнение программы в ЭВМ — это последовательное осуществление в заданном порядке арифметических и логических операций над словами (кодами), действий по организации вычислительного процесса и оценки получающихся результатов.
Микро-ЭВМ и микроконтроллеры
- микро-ЭВМ, наследующие архитектуру персональных компьютеров и совместимых с ними не только через интерфейсы, но и на уровне архитектуры и программного обеспечения;
- микроконтроллеры, которые берут своё начало от узкоспециализированных микропроцессорных платформ (PIC- контроллеров, процессоров цифровой обработки сигналов и др.).
Роль микро-ЭВМ в задачах автоматизации процессов повышается в связи с тем, что управление процессами требует не столько вычислений, сколько логической увязки разнообразной информации. В микро-ЭВМ значительно легче, чем в универсальных ЭВМ, осуществляется связь с измерительными и исполнительными органами управляемого процесса.
5.3. СЕТЕВЫЕ КОМПОНЕНТЫ СИСТЕМ [10].
Архитектура открытых информационных систем
- система должна обладать открытой архитектурой;
- система должна быть распределённой.
Только с развитием микропроцессорной техники и сетевых технологий стало возможно и экономически оправданно строить системы автоматики, действительно удовлетворяющие этим требованиям. Стало целесообразным выделять в общей структуре системы отдельные локальные задачи, решение которых поручать локальным контроллерам. Сеть же позволяет контроллерам в качестве аргументов для вычисления управляющего вектора использовать переменные других контроллеров, обеспечивая связанность системы управления в целом. Такая архитектура существенно увеличивает производительность, надежность и масштабируемость систем. Международная организация по стандартизации (ISO) в 1984 г. сформулировала модель взаимодействия открытых систем (OSI), выделив семь уровней такого взаимодействия.
Эталонная модель взаимодействия открытых систем декларирует не только взаимодействие, но и архитектуру таких систем. Всякая открытая система является иерархически построенной, и внутренняя архитектура системы подобна глобальной архитектуре, в которую входит множество подсистем. Это означает, что программное обеспечение для систем любого уровня создаётся на общих принципах и является достаточно универсальным. Предполагается, что непосредственная связь между физически различными системами или подсистемами осуществляется на физическом уровне. В идеальном случае каждый из уровней должен взаимодействовать непосредственно лишь с двумя прилежащими к нему уровнями.
Уровни модели взаимодействия открытых систем (снизу вверх) означают следующее:
1. Физический уровень (нижний).
Отвечает за физическую среду передачи: кабели, разъемы, согласование линий связи, электрическое преобразование сигналов.
2. Канальный уровень. Основная задача — логическое управление линией передачи, управление доступом к сети, обнаружение ошибок передачи и их исправления.
3. Сетевой уровень. Отвечает за адресацию пакетов данных, связывает физические сетевые адреса и логические имена, осуществляет выбор маршрута доставки данных.
4. Транспортный уровень. Здесь осуществляется создание пакетов данных и доставка этих пакетов. При необходимости используются процедуры восстановления потерянных данных.
5. Сеансовый уровень. Сеанс связи означает, что между абонентами сети установлено логическое соединение, определены логические имена, контролируются права доступа.
6. Представительский уровень. На этом уровне происходит преобразование рабочей информации в логическую и физическую форму, пригодную для передачи в сети (сжатие, шифрование, преобразование форматов данных и пр.).
7. Прикладной уровень (уровень приложений).
Уровень программ пользователя. Верхний уровень, непосредственно взаимодействующий с пользователем.
Структура уровней такова, что замена аппаратной части сказывается лишь на уровнях 1 и 2, вышестоящие уровни этой замены не должны заметить.
Локальные управляющие вычислительные сети
В системах автоматики часто используют сегменты обычных локальных и глобальных сетей. Большинство локальных сетей имеет выход в глобальную сеть, но характер передаваемой информации, принципы организации обмена, режимы доступа к ресурсам внутри локальной сети, как правило, сильно отличаются от тех, что приняты в глобальной сети. По локальной сети может передаваться самая разная цифровая информация: данные, изображения, телефонные разговоры, электронные письма и т.д. Задача передачи полноцветных динамических изображений предъявляет самые высокие требования к быстродействию сети. Чаще всего локальные сети используются для совместного использования таких ресурсов, как дисковое пространство, принтеры и выход в глобальную сеть, но это лишь часть возможностей локальных сетей. Например, они позволяют осуществлять обмен информацией между компьютерами разных типов. Абонентами (узлами) сети могут быть не только компьютеры, но и другие устройства (принтеры, плоттеры, сканеры).
Локальные сети дают возможность организовать систему параллельных вычислений на всех компьютерах сети, что позволяет многократно ускорить решение сложных математических задач. С их помощью можно также управлять работой сложной технологической системы или исследовательской установки с нескольких компьютеров одновременно.
Упомянем о таких важнейших понятиях теории сетей, как сервер и клиент. Сервером называется абонент (узел) сети, который предоставляет свои ресурсы другим абонентам, но сам не использует ресурсы других абонентов. Серверов в сети может быть несколько, и не обязательно сервер — самый мощный компьютер. Выделенный сервер — это сервер, занимающийся только сетевыми задачами. Невыделенный сервер может заниматься помимо обслуживания сети и другими задачами. Клиентом (рабочей станцией) называется абонент сети, который только использует сетевые ресурсы, но сам свои ресурсы в сеть не отдает. В принципе, каждый компьютер может быть одновременно как клиентом, так и сервером. Под сервером и клиентом часто понимают не сами компьютеры, а работающие на них программные приложения.
Топологии локальных сетей
- Физическую топологию, схему расположения компьютеров и прокладки кабелей.
- Логическую топологию, структуру логических связей и способов передачи сигналов.
- Информационную топологию, пути распространения информации по сети.
Существует три базовых топологии сети:
- шина (bus), при которой все компьютеры параллельно подключаются к одной линии связи и информация от каждого компьютера одновременно передается всем остальным компьютерам.
- звезда (star), при которой к одному центральному компьютеру присоединяются остальные периферийные компьютеры, причем каждый из них использует свою отдельную линию связи.
- кольцо (ring), при которой каждый компьютер передает информацию всегда только одному компьютеру, следующему в цепочке, а получает информацию только от предыдущего в цепочке компьютера, и эта цепочка замкнута в «кольцо».
На практике используют и любые комбинации базовых топологий, но большинство сетей ориентированы именно на эти три.
Топология «шина»
Так как разрешение возможных конфликтов в данном случае ложится на сетевое оборудование каждого абонента, аппаратура сетевого адаптера получается сложнее, чем при других топологиях. Шине не страшны отказы отдельных компьютеров. На концах шины необходимо предусматривать включение согласующих устройств — терминаторов, для исключения отражений от концов линии. Отказ сетевого оборудования в шине трудно локализовать, так как все адаптеры включены параллельно. При прохождении по «шине» информационные сигналы ослабляются, что накладывает ограничения на суммарную длину линий связи. Каждый абонент может получать из сети сигналы разного уровня в зависимости от расстояния до передающего абонента. Это предъявляет дополнительные требования к приемным узлам сетевого оборудования. Для увеличения длины сети используют сегментирование шины, с соединением сегментов через специальные восстановители сигналов — репитеры.
Топология «звезда»
В звезде на каждой линии связи находятся только два абонента: центральный и один из периферийных. К каждому периферийному абоненту может подходить как один кабель (передача в обоих направлениях), так и два кабеля (с передачей в одном направлении).
Проблема затухания сигналов в линии связи решается проще, каждый приемник получает сигнал одного уровня.
Недостаток топологии «звезда» — ограничение количества абонентов. Обычно центральный абонент может обслуживать не более 8-16 периферийных абонентов. Иногда в звезде предусматривается возможность подключения вместо периферийного абонента еще одного центрального абонента, в результате получается топология из нескольких соединенных между собой звезд.
Большое достоинство звезды состоит в том, что все точки подключения собраны в одном месте, что позволяет легко контролировать работу сети, а также ограничивать доступ посторонних лиц к жизненно важным для сети точкам подключения.
Существует топология, называемая пассивной звездой, которая только внешне похожа на звезду. В центре сети с данной топологией помещается не компьютер, а концентратор (hub), выполняющий ту же функцию, что и репитер. Он восстанавливает приходящие сигналы и пересылает их в другие линии связи. Фактически мы имеем дело с шинной топологией, так как информация от каждого компьютера одновременно передается ко всем остальным компьютерам, а центрального абонента не существует.
Топология «кольцо»
Максимальное количество абонентов в кольце может быть до тысячи и больше. Кольцевая топология обычно является самой устойчивой к перегрузкам, она обеспечивает уверенную работу с самыми большими потоками передаваемой по сети информации. В ней, как правило, нет конфликтов. Так как сигнал в кольце проходит через все компьютеры, выход из строя хотя бы одного из них или его сетевого оборудования нарушает работу всей сети. В этой топологии обычно предусматривают прокладку двух (или более) параллельных линий связи, одна из которых находится в резерве. В то же время крупное преимущество кольца состоит в том, что ретрансляция сигналов каждым абонентом позволяет существенно увеличить размеры всей сети в целом (порой до нескольких десятков километров).
Иногда топология «кольцо» выполняется на основе двух кольцевых линий связи, передающих информацию в противоположных направлениях, что позволяет увеличить скорость передачи информации, а при повреждении одного из кабелей работать с одним кабелем.
литература
[Электронный ресурс]//URL: https://drprom.ru/kursovaya/tsifrovyie-sistemyi-avtomaticheskogo-upravleniya/
1. Мирошник И.В. Теория автоматического управления. Линейные системы: Учебное пособие для вузов. — СПб.: Питер, 2005. — 336 с.
10. Туманов М.П. Технические средства автоматизации и управления: Учебное пособие. – М.: МГИЭМ, 2005, 71 с. URL: Tehnicheskie_sredstva_avtomatizatsii_i_upravleniya.rar
11. Михайлов В.С. Теория управления. – К.: Выща школа, 1988.
12. Зайцев Г.Ф. Теория автоматического управления и регулирования. – К.: Выща школа, 1989.
Главный сайт автора ~ Лекции по ОТУ
О замеченных опечатках, ошибках и предложениях по дополнению: davpro@yandex.ru.
Copyright ©2008-2009 Davydov А.V.