
Автоматизация производства в машиностроении представляет собой самостоятельную комплексную проблему. Ее решение направлено на создание нового совершенного оборудования, технологических процессов и систем организации производства, функционирование которых неразрывно связано с улучшением условий труда, ростом качества продукции, сокращением потребности в рабочей силе и с систематическим повышением прибыли.
Современные средства автоматизации должны развиваться в двух направлениях: автоматизация выпускаемого и действующего оборудования в целях повышения его эффективности и создание новых автоматизированных технологических комплексов, позволяющих решить задачу повышения производительности, надежности и точности выполнения работ при обеспечении необходимой и экономически оправданной гибкости производства.
Эффективность автоматизации прямо зависит от того, насколько рационально организован производственный процесс в целом, как комплексно и полно на всех звеньях технологической цепочки внедрены средства автоматизации, от того, насколько принятая система организации и управления производством позволяет принимать решения на низшем уровне (в целях ликвидации внеплановых простоев).
Автоматизация требует рассматривать производственный процесс как единую систему.
Отработка технических решений по созданию автоматизированных технологических комплексов, по-видимому, должна вестись, прежде всего, применительно к серийному производству (оно составляет до 40 % общемашиностроительного производства), поскольку они могут быть применены также в массовом и крупносерийном производстве. Сегодня даже автомобилестроение из отрасли с традиционно массовым производством переходит к организации, больше соответствующей крупносерийному характеру выпуска продукции. Очевидно, что по мере совершенствования технических решений, разработанных для условий серийного производства, внедрения новых исходных средств автоматизации и элементной базы, появится возможность их использования и для автоматизации мелкосерийного производства. Таким образом, принятое направление на развитие автоматизации в серийном производстве не только будет способствовать подъему производительности труда в этой области, но и окажет существенное влияние на уровень мелкосерийного и массового производства.
Организация технологического процесса ремонта двигателя
... и техники безопасности. Рассчитать себестоимость ремонта двигателя. трактор двигатель ремонт себестоимость Раздел 1. Расчетно-технологическая часть В расчетно-технологической части проекта предлагается произвести расчет цеха по ремонту дизельной топливной аппаратуры с разработкой ...
Одной из основных причин разработок и внедрения роботов является экономия средств. По сравнению с традиционными средствами автоматизации применение роботов обеспечивает большую гибкость технических и организационных решений, снижение сроков комплектации и запуска в производство автоматизированных станочных систем. По предварительным данным, использование роботов для автоматической установки и снятия деталей позволяет рабочему обслуживать от четырех до восьми металлорежущих, станков.
С экономическими вопросами, возникающими при применении роботов, тесно связан и социальный аспект их использования. При определении целесообразности применения роботов в том или ином случае (особенно при необходимости замены рабочего на участках с опасными, вредными для здоровья условиями труда) превалирующими должны быть интересы человека, его безопасность и удобство работы. Необходимо также учитывать и фактор непрерывного роста уровня общеобразовательной и специальной подготовки трудящихся. Роботы должны освободить человека от выполнения бездумной механической работы и скомпенсировать потребность в низкоквалифицированном труде. Таким образом, применение роботов в дальнейшем должно оказать существенное влияние (в числе прочих факторов научно-технической революции) на социальную структуру общества.
Уровни автоматизации.
Выпуск законченных систем машин для комплексной механизации и автоматизации производства, создание автоматизированных цехов и заводов на основе широкого применения ПР, высокопроизводительного оборудования, встроенных систем автоматического управления с использованием микропроцессоров и микроЭВМ позволяет применять в народном хозяйстве в больших масштабах высокопроизводительные энерго- и материала-сберегающие технологии, обеспечивает значительное повышение надежности и качества выпускаемой продукции. При этом основное внимание должно быть уделено ускорению работ по автоматизации машиностроительного производства, определяющего промышленный потенциал страны и технический уровень всех отраслей народного хозяйства.
Уровень и способы автоматизации зависят от серийности производства и оснащенности его техническими средствами.
Средства производства, выпускаемые машиностроением, имеют два полюса:
1. универсальное оборудование с ручным управлением, обеспечивающее наибольшую гибкость производства (например, универсальные станки, которые могут быть быстро приспособлены к выпуску практически любой продукции, но обладают низкой производительностью и требуют постоянного присутствия станочника);
2. автоматические линии с жесткой программой работ, обеспечивающие наиболее высокую производительность труда, наименьшее привлечение рабочей силы и высокую стабильность качества, но практически не приспособленные к смене выпускаемой продукции и трудно перестраиваемые даже при сравнительно небольших изменениях в конструкции.
Остальное оборудование занимает промежуточное положение.
Развитие автоматизации оборудования позволяет поднять производительность труда, но, как правило, сопровождается снижением универсальности оборудования и сужением технологических областей его применения.
Дипломная работа автоматизация технологических процессов и производств
... построенных на базе основного технологического оборудования и автоматизированной системы управления технологическими процессами и оборудованием; из модулей подготовки производства, обеспечения материалами, заготовками, деталями, инструментами; из модулей обслуживания и обеспечения работы оборудования, удаления отходов производства. На уровне цеха ГАП включает ...
Автоматизация имеет целью исключить последовательно различные функции, выполняемые рабочим-станочником.
Первый уровень автоматизации
Второй уровень автоматизации
Наибольшей универсальностью и быстротой переналадки обладают ПР, используемые в качестве загрузочных устройств, По мере снижения требований к быстроте переналадки загрузочных устройств и увеличения размера партии обрабатываемых деталей упрощаются средства для загрузки деталей в рабочую зону. На многоцелевых станках такими средствами очень часто служат автооператоры.
Второй уровень автоматизации все чаще обеспечивается созданием роботизированных технологических комплексов (РТК), в которых робот обслуживает одну единицу или группу оборудования.
Третий уровень автоматизации
за состоянием инструмента и своевременной его заменой (контроль за фактическим ресурсом каждого инструмента и размерный контроль положения режущих кромок);
- качества обрабатываемых деталей (размеров, а в необходимых случаях и обрабатываемой поверхности);
- за состоянием станка и удалением стружки, а также контроль и подналадка технологического процесса (адаптивное управление).
Автоматизация перечисленных выше функций дополнительно освобождает человека от постоянной связи с машиной и позволяет расширить сферу обслуживания оборудования одним человеком. Такая автоматизация обеспечивает длительную работу оборудования по обработке деталей одного наименования при минимальном участии или даже без участия человека в течение одной -двух смен. Широкое распространение такого метода ограничено необходимостью, иметь достаточный запас деталей одного наименования для работы оборудования в течение нескольких смен.
Третий уровень автоматизации обеспечивается созданием адаптивных РТК роботизированных технологических комплексов, а также гибких производственных модулей, представляющих собой комплект, состоящий из многооперационного станка (обрабатывающего центра), устройств приема и перемещения спутников (полет), ПР (или автооператоров), устройств контроля, диагностирования, подналадки и других вспомогательных механизмов и устройств, управляемый от общего устройства управления.
Четвертый уровень автоматизации
Оборудование с автоматической переналадкой экономически выгодно при обработке любых партий деталей и пригодно к выпуску сборочных комплектов деталей, необходимых для обеспечения ритмичной работы сборочных цехов. Оно позволяет существенно сократить объемы незавершенного производства, свести к минимуму производственный цикл изготовления изделий.
Высокая стоимость всех средств автоматизации, технические трудности, стоящие на пути создания высоконадежного
оборудования и средств контроля и управления, пока сдерживают широкое использование в машиностроении этой наиболее высокой ступени автоматизации.
Пятый уровень автоматизации
ГПС в общем случае должна обеспечивать комплексную автоматизацию всех звеньев производственного процесса, включая процессы обработки и управления, подготовку производства, разработку конструкторской и технологической документации и планирование.
|
|
В условиях массового производства ГПС может включать автоматизированные линии, допускающие переналадку на обработку неизвестных заранее конструктивных модификаций деталей, а в условиях серийного и мелкосерийного производства — автоматизированные участки, роботизированные комплексы, станочные модули и т. п. Таким образом, понятие гибкого автоматизированного производства распространяется на сложные производственные системы (автоматизированные предприятия и заводы-автоматы) и на их структурные составляющие: автоматизированные цехи, автоматизированные и роботизированные участки, гибкопереналаживаемые автоматизированные линии и роботизированные комплексы.
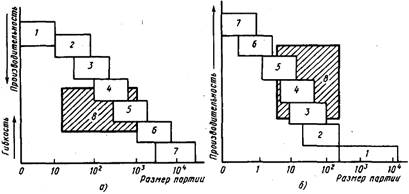
Рис. 1 Примерные границы практического использования оборудования некоторых типов, различающихся уровнем автоматизации в зависимости от :
- а — размера партии;
- б — числа наименований обрабатываемых деталей;
- 1 — универсальные станки с ручным управлением;
- 2 — операционные станки с программным управлением;
- 3 — обрабатывающие центры;
- 4 — РТК я ГПМ;
- 6 — ГАУ;
- 6 — ГАЛ;
- ГАЦ;
- вводы;
- 7— автоматические линии;
- 8 — ГПС
Повышение уровня автоматизации применяемого оборудования тесно связано с ростом уровня организации всего производства на данном предприятии. Изолированный гибкий производственный модуль или станок с программным управлением оказывается неэффективным при одиночном использовании на предприятиях, где не применяют другие станки с программным управлением, поскольку вся система организации производства на предприятии не соответствует требованиям, предъявляемым новой высокопроизводительной техникой.
Гибкие производственные модули (ГПМ), гибкие автоматизированные участки (ГАУ) и гибкие автоматизированные линии (ГАЛ) должны стать основными видами гибких автоматизированных производственных систем в машиностроении на двенадцатую пятилетку. В дальнейшем, по мере их совершенствования, будут создаваться гибкие автоматизированные цехи (ГАЦ) и гибкие автоматизированные заводы, которые могут включать автоматизированные системы управления (АСУ) производством, типовые системы автоматизированного проектирования (САПР машиностроения) и автоматизированные системы технологической подготовки производства (АСТПП).
Точные границы области рационального применения различных видов оборудования в зависимости от типа производства очертить невозможно, так как они зависят от конкретных технико-экономических показателей и характера обрабатываемых деталей. Построенные на основе статистических данных примерные границы практического использования различных типов оборудования и комплексов, различающихся уровнем автоматизации, показаны на рис.1 Заштрихованная часть области для ГПС статистически соответствует наиболее частому их использованию и определяет направление научно-следовательских и поисковых работ.
Основные типы роботизированных технологических комплексов.
Промышленные роботы (ПР) призванные заменить ручной труд человека машинным трудом, являются принципиально новым технологическим средством, позволяющим завершить комплексную автоматизацию производства и придать последнему свойство гибкой переналадки на различные технологии и изготовляемые изделия.
Снабженные роботами технологические ячейки, участки, линии именуются роботизированными технологическими комплексами (РТК).
Разнообразие производственных процессов в машиностроении и приборостроении, местных условий производства, серийность и пр. определяют соответственно различные типы роботизированных технологических комплексов.
При классификации РТК будем руководствоваться следующими признаками:
- тип роботизированного производственного подразделения;
- степень изменения производства, связанная с созданием данного РТК;
- вид технологического процесса;
- число выполняемых технологических операций;
- тип и количество используемого основного технологического оборудования;
- тип и число используемых промышленных роботов;
- серийность и номенклатура продукции;
- компоновка комплекса;
- принцип управления комплексом;
- степень участия (функции) человека в комплексе.
1. Классификация РТК по типу роботизированного подразделения основывается на количественной характеристике выполняемых комплексом технологических операций. Простейшим типом РТК, который лежит в основе всех более крупных роботизированных комплексов вплоть до целых предприятий, является роботизированная технологическая ячейка (РТЯ).
В ней выполняется минимум основных технологических, операций. При этом число единиц технологического оборудования и ПР в составе РТЯ невелико, но строго оно не регламентируется. В частности, в РТЯ может совсем отсутствовать технологическое оборудование, когда основную операцию выполняет непосредственно ПР или, напротив, ПР может быть несамостоятельной единицей, а конструктивно объединенным с основным технологическим оборудованием.
Следующим более крупным основным роботизированным комплексом является роботизированный технологический участок (РТУ).
Он характеризуется выполнением нескольких основных технологических операций, которые объединены этим участком технологически, конструктивно (оборудованием) и (или) организационно (управлением).
Эти операции могут быть одинаковыми или различными. Если (в последнем случае) они технологически связаны, такой комплекс представляет собой роботизированную технологическую линию (РТЛ).
Операции могут быть разными, но не связанными технологически в определенную последовательность, а объединенными на участке по другому признаку (например, по принадлежности к одному виду технологического процесса, по используемому оборудованию и т. п.).
Простейший РТУ может включать несколько единиц технологического оборудования, обслуживаемых одним ПР (неподвижным с размещением оборудования вокруг ПР или подвижным, перемещающимся вдоль ряда единиц оборудования).
Но такой РТУ, где ПР выполняет основную технологическую операцию (например, сборку), включает обычно несколько ПР, которые последовательно выполняют сборку одного изделия.
Следующим по сложности РТУ является участок, включающий несколько единиц технологического оборудования и обслуживающих их, одинаковых ПР. Дальнейшим усложнением РТУ будет совместная работа на участке ПР различных типов.
Большой системой РТК является цех, состоящий, например, из нескольких РТУ, автоматизированных складов и связывающих их, транспортных ПР. Пределом развития роботизированного производства является комплексно роботизированный завод.
2. Классификация РТК по характеру изменения производства, связанного с созданием данного РТК, содержит варианты комплексов, которые отличаются степенью влияния этого признака при разработке РТК на основные составляющие элементы комплекса. Для вновь создаваемых производств с новой технологией это влияние, очевидно, максимально, так как в данном случае разрабатывается заново все основное оборудование, а для действующего производства, автоматизируемого на базе серийных ПР без изменения основного оборудования и компоновки — минимально.
3. Классификация РТК по виду роботизируемого технологического процесса определяет варианты РТК для разных видов технологических процессов. Этим, разумеется, не исчерпываются все возможные виды последних. Классификация РТК по типу основного технологического оборудования (полуавтоматы, автоматы с цикловым управлением, ЧПУ и т. д.), типу ПР (с учетом типа приводов, числа манипуляторов, подвижности в пределах РТК, типа управления и т. д.) и числу единиц оборудования и ПР. При этом возможны два основных варианта РТК в зависимости от роли ПР в РТК: в первом случае ПР выполняют основные технологические операции (сборка, сварка, окраска и т. д.), а во втором — вспомогательные по обслуживанию основного технологического оборудования.
4. Классификация РТК по серийности и номенклатуре продукции включает два важных фактора. Степень серийности в данном случае определяется объемом партий продукции, которые могут выпускаться без переналадки комплекса, а номенклатура — широтой перечня выпускаемых видов продукции. Оба эти показателя имеют существенное влияние на эффективность РТК. В частности, каждый РТК характеризуется предельными значениями этих параметров, вне рамок которых данный комплекс оказывается экономически невыгодным вплоть до целесообразности перехода вообще от переналаживаемых РТК к специальным автоматам (при большой серийности и узкой номенклатуре) или даже к использованию людей вместо ПР (в противоположном предельном случае).
6. Классификация РТК по компоновке комплекса определяет размещение технологического оборудования и ПР. При простой линейной компоновке оборудование комплекса располагается в один ряд (по линии), а объемная компоновка означает его расположение на нескольких этажах.
7. Классификация, РТК по типу управления — централизованное, децентрализованное и комбинированное.
Централизованное управление может осуществляться от стандартной ЭВМ или от специального устройства управления.
Децентрализованное управление осуществляется с помощью совокупности местных устройств управления, которые связаны друг с другом с целью взаимной координации. Простейшим вариантом такой координации является увязка по времени начала и конца отдельных операций (включая выдачу команд и блокировок).
Более сложные формы взаимосвязи осуществляются в функции различных, параметров, характеризующих реализуемый технологический процесс.
Комбинированное управление предполагает наряду с централизованным управлением наличие местных устройств управления. Такая система управления может быть одноуровневой, когда сигналы управления, поступающие из центра, и сигналы, вырабатываемые местными устройствами управления, комбинируются на одном уровне, и иерархической (многоуровневой), когда местные устройства управления подчинены центру. При этом число уровней иерархии управления может быть более двух, увеличиваясь по мере усложнения комплекса. Все эти варианты управления РТК могут быть программными и адаптивными как в отношении основного технологического оборудования, так и роботов.
8. Классификация по степени участия человека в РТК определяет два случая участия человека: может непосредственно выполнять некоторые технологические операции — основные или вспомогательные; может участвовать в управлении комплексом. В последнем случае РТК будет являться не автоматическим, а автоматизированным.
Во всех случаях важнейшими элементами РТК являются устройства сопряжения ПР с остальным технологическим оборудованием. Наибольшей технологической оснастки в этом смысле требуют роботы первого поколения для строго упорядоченной подаче деталей.
Автоматизация операций и повышение эффективности производственных процессов.
Эффективность автоматизации определяется тем, насколько рационально организован производственный процесс в целом, комплексно ли и на всех ли звеньях технологической цепочки внедрены средства автоматизации, насколько принятая система организации и управления производством позволяет принимать решения на низшем уровне (для ликвидации внеплановых простоев).
Различают четыре основных источника повышения эффективности производства и экономии: применение прогрессивных технологических процессов; увеличение производительности оборудования; снижение трудовых затрат; экономия, получаемая от проведения организационно-технических мероприятий и улучшения качества выпускаемых изделий.
Применение прогрессивных технологических процессов
Автоматизация технологического процесса обработки должна быть комплексной: от получения заготовки до сборки готового изделия. Только в этом случае производственный процесс будет единой системой, позволяющей наилучшим образом использовать все производственные ресурсы — материальные и человеческие.
При наличии сквозного автоматизированного технологического процесса операции сборки изделия, являясь конечными, в общем цикле, предъявляют требования к конструкции изделия (с целью обеспечения автоматической сборки), к показателям точности и качества выполнения отдельных операций. В этой связи при разработке первых опытных образцов автоматизированных предметных технологических комплексов «оборудование — робот» особое внимание должно быть обращено на объект производства» на примере выпуска, которого должны быть выработаны первые технические решения, касающиеся оборудования, структуры технологического процесса, организации производства и т, п.
Увеличение производительности оборудования
Снижение трудовых затрат
Экономия, получаемая за счет проведения организационно — технических мероприятий, повышения качества изделий и применения средств автоматизации, может быть весьма значительной. Увеличение точности обработки деталей существенно сокращает
трудоемкость сборочных работ. Автоматизация сборочных работ позволяет, в свою очередь, ликвидировать часть смежных операций, таких как разметка, подгонка по месту. Применение средств автоматизации обеспечивает сокращение брака по вине рабочего и в ряде случаев уменьшает потребность в специальной оснастке.
Создание и внедрение типовых автоматизированных комплексов «оборудование — робот» обеспечивает и дополнительный социально-экономический эффект» получаемый за счет следующих факторов:
- сокращение потерь (выражаются в стоимости условно-недоданной продукции), связанных с текучестью рабочей силы и с участием человека в производственном процессе (перерывы на отдых, исправление брака, неравномерность выработки и т. п.), и готовых потерь из-за временной нетрудоспособности (заболеваемость, травматизм, другие причины);
- сокращение затрат на социальное обеспечение и всех видов доплат и льгот в связи с улучшением условий труда и уменьшением числа работающих.
Создание и внедрение ГПС является одним из основных направлений решения проблемы повышения производительности труда и сокращения доли ручного труда, повышения качества выпускаемой продукции, в первую очередь в условиях мелкосерийного и серийного производства.
При одинаковом календарном годовом фонде времени (8760 ч) предполагается, что универсальное оборудование работает две смены, а ГПС—три. Использование ГПС обеспечивает увеличение в общем, балансе рабочего времени той его доли, которая связана с непосредственной обработкой деталей.
Опыт создания ГПС в механообработке показывает, что их применение (в сравнении, например, с участками, оснащенными универсальными станками с ручным управлением), обеспечивает достижение высоких технико-экономических показателей: снижение трудоемкости обработки деталей в 5 раз; сокращение обслуживающего персонала в 3—10 раз; увеличение выпуска продукции за счет повышения коэффициента использования оборудования, более полного использования основных фондов и сокращение количества требуемого оборудования; сокращение сроков и стоимости подготовки производства ориентировочно в 2 … 5 раз.
Заключение.
Современные достижения в автоматике, радиоэлектронике и вычислительной технике позволяют рассматривать комплексную автоматизацию производственных процессов как единую систему автоматизации, охватывающую производство, в целом начиная с проектирования изделий и технологии их изготовления и кончая доставкой изделий потребителю. С расширением применения робототехнических средств, наряду с внедрением оборудования, отличающегося высокой степенью концентрации операций, значительно повысилась гибкость управления производством. Сегодня машиностроение стоит на пороге широкого внедрения комплексно-автоматизированных ГПС, позволяющих предприятиям в нужный момент и за короткое время переходить на выпуск новой или существенно модернизированной продукции при минимальных затратах.
ГПС — это новый этап в автоматизации производства, основанной на широком использовании принципов групповой технологии, станков с числовым программным управлением (в том числе типа «обрабатывающий центр») и гибких автоматизированных производственных модулей, промышленных роботов, роботизированных комплексов, автоматизированного транспортно-складского оборудования и других машин, объединенных автоматизированной системой управления производством. Непременными компонентами ГПС являются системы автоматизированного проектирования и автоматизированные системы управления технологическими процессами.
Создание ГПС — комплексная научно-техническая проблема. Ее решение связано с разработкой точного и надежного многооперационного оборудования и систем управления, введением автоматического контроля точности обработки и состояния инструмента, применением адаптивного управления процессом обработки, развитием диагностических методов и средств автоматического контроля за состоянием оборудования. Не менее важно совершенствовать транспортирование, хранение и учет заготовок, деталей, инструмента, оснастки и материалов. Требуется резко повысить надежность оборудования и систем управления, предназначенных для работы в условиях ГПС.
Речь идет о системе производства, при которой материалы и компоненты доставляются в цехи лишь по мере надобности и не накапливаются там. При такой организации производства все должно выполняться в соответствии с заранее установленным графиком при заранее рассчитанной себестоимости. Таким образом, метод «как раз вовремя» сводится прежде всего к системе обеспечения оптимальных запасов, т. е, системе рациональной организации производства и управления, когда ритму сборки изделия подчинены все звенья производственного процесса. При этом достигается существенная экономия за счет сокращения запасов комплектующих изделий и готовой продукции, экономятся производственные площади, оборудование используется на полную мощность. Товарные запасы сокращаются до минимального уровня, при котором еще можно обеспечить производственный процесс.
Внедрение новой системы обеспечивает:
- сокращение расходов на складские помещения и хранение деталей, комплектующих изделий и материалов;
- при этом автоматизированные склады перестают быть складами- накопителями и становятся складами-распределителями, составным звеном внутризаводского транспорта;
- ускорение процесса производства за счет сокращения сроков хранения и транспортирования материалов;
- повышение качества продукции и создание условий для детальной разработки всего производственного и технологического процесса еще на стадиях его проектирования.
При этом ГПС позволяет достичь состояния, когда каждый участок, цех и предприятие обходятся минимальными запасами сырья и заделов производства, тщательно рассчитанных исходя только из условий выравнивания времени различных технологических циклов. Конечно, это возможно лишь при сквозном внедрении гибких автоматизированных производств на заводе в целом и тщательном соблюдении дисциплины поставок предприятиями-кооператорами и потребителями продукции.
Внедрение системы организации производства по принципу «как раз вовремя» тесно связано с решением следующих основных задач:
- повышение уровня автоматизации в управлении народным хозяйством;
- обеспечение рационального управления запасами в целях извлечения большей прибыли, а это значит — доведение их до оптимального уровня;
- повышение эффективности и снижение себестоимости процессов транспортирования и перемещения материалов;
- обеспечение одновременного изготовления всего набора деталей, составляющих сборочный комплект, обеспечение одновременной доставки сборочных комплектов и единиц, а также других материалов, необходимых для выпуска готовой продукции;
- повышение качества обрабатываемых деталей.
Первая задача, Вторая задача
Внедрение системы обеспечения оптимальных запасов наиболее актуально для условий мелкосерийного и среднесерийного производств, характеризующихся в настоящее время наличием значительных буферных запасов, что в свою очередь приводит к существенным потерям в виде незавершенного производства.
Интегрированные системы управления всеми сферами производства в условиях ГПС обеспечивают, наряду с групповым управлением оборудованием, управление ритмом производственного процесса с учетом сменных и суточных заданий для отдельных рабочих мест. В банке данных управляющих систем для ГПС содержатся, наряду с другими, данные о производственных запасах, что открывает возможность в случае производственной необходимости обеспечить оперативное пополнение запасов на производственных участках с помощью автоматизированных транспортно-складских систем. Поэтому применительно к серийному производству решение поставленных задач, возможно, прежде всего, при наличии таких технических средств, которые вместе с новой организацией производства характерны для ГПС, в том числе автоматизированных систем управления производством, автоматизированных систем технологической подготовки производства.
Третья задача, Четвертая задача, Пятая задача
Таким образом, наиболее полное развитие современных форм организации производства по принципу «как раз вовремя» может быть обеспечено на базе гибких систем, которые, в свою очередь, основываются на широком использовании средств вычислительной техники, автоматики, новых видов обрабатывающего оборудования и средств робототехники. Комплексная автоматизация производства, создание ГПС с широким использованием робототехнических средств открывают перспективы и для внедрения новых современных форм организации производства.
Список использованной литературы.
[Электронный ресурс]//URL: https://drprom.ru/referat/avtomatizatsiya-mashin/
Роботизированные производственные комплексы/ Ю. Г. Козырев, А. А. Кудннов, В. Э. Булатов и др.; Под ред. Ю. Г. Козырева, А. А. Кудинова. — М.: Машиностроение, 1987. — 272 с., ил. — (Автоматические манипуляторы и робототехнические системы).
Робототехника/Ю . Д. Андрианов, Э. П. Бобриков, В. Н. Гончаренко и др.; Под ред. Е. П. Попова, Е. И. Юревича. —М.: Машиностроение, 1984. — 288 с. ил. — (Автоматические манипуляторы и роботехнические системы).