
Лазерное сканирование, появившись на украинском рынке геодезических услуг около 10 лет назад, постепенно находит применение при решении всё большего круга задач. Это – оперативный контроль строительства инженерных сооружений и мониторинг их состояния при эксплуатации, создание или восстановление чертежей, 3D-моделирование сложных архитектурных объектов. Всё это может быть использовано для создания трёхмерного информационного наполнения геоинформационных систем.
Суть технологии заключается в определении пространственных координат точек поверхности объекта. Это реализуется посредством измерения расстояния до всех определяемых точек с помощью лазерного безотражательного дальномера (рис.1)[1].
При каждом измерении луч дальномера отклоняется от своего предыдущего положения так, чтобы пройти через узел некой мнимой нормальной сетки, называемой еще сканирующей матрицей. Количество строк и столбцов матрицы может регулироваться. Чем выше плотность точек матрицы, тем выше плотность точек на поверхности объекта. Измерения производятся с очень высокой скоростью — тысячи, а порой и десятки тысяч измерений в секунду. Прибор, реализующий на практике приведенную технологию измерений, называется лазерным сканером. Результатом работы сканера является множество точек с вычисленными трехмерными координатами. Такие наборы точек принято называть облаками точек или сканами. Обычно количество точек в одном облаке может варьироваться от нескольких сотен тысяч до нескольких миллионов.
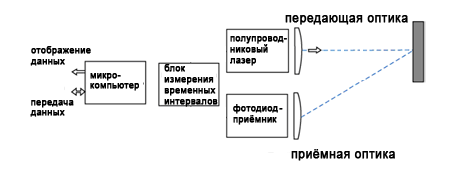
Рисунок 1 – Принцип работы лазерного сканера
Актуальность и цель
Задача создания архитектурных чертежей возникает при решении целого ряда задач, среди которых строительство новых объектов в условиях существующей застройки, реконструкция существующих зданий, создание информационных и поисковых систем и др. Чаще всего основными методами для получения архитектурных чертежей является непосредственные измерения при помощи линеек и измерительных лент, геодезические методы и фотограмметрические методы.
Появление систем наземного лазерного сканирования дало возможность усовершенствование таких задач как : контроль монтажных измерений, исполнительная съемка при строительстве инженерных сооружений, наблюдение за горизонтальными и вертикальными деформациями и т.д.
Основной тенденцией на сегодняшний день является переход от двухмерных чертежей к пространственным 3-х мерным моделям и желание многих проектировщиков иметь геометрически правильную 3-х мерную модель здания. Однако на сегодняшний день нет полной методики построения 3-х мерных моделей по результатам наземного лазерного сканирования. Поэтому целью моей научной работы является исследование технологии обработки исходных данных наземного лазерного сканирования зданий и сооружений.
Порядок работы системы. Упражнение: включение системы
... основы автоматизации систем вентиляции и кондиционирования рабочих помещений; 2. разработать структурную схему управления систем вентиляции и кондиционирования; 3. разработать инструкционные карты по работе с системами вентиляции и кондиционирования. 1 СИСТЕМЫ ВЕНТИЛЯЦИИ 1.1 Предназначение ...
Предполагаемая научная новизна
Развитие последних технологий в различных областях науки, техники и производства явно демонстрирует совершенствование методов сбора данных и построения цифровых моделей объектов и рельефа местности, направленное на повышение их точности и реальности. Автоматизацию процессов и уменьшение стоимости работ. К таким методам относятся: аэро- и космическая съемка и наземная стереофотограмметрическая съемка, воздушное и наземное лазерное сканирование и GPS-съемка.
Многообразие методов сбора данных позволяет предложить различные технологические схемы их использования для построения трехмерных моделей объектов. В настоящий момент для трехмерного моделирования территорий и объектов разработаны различные подходы, различающиеся точностью, детальностью, территориальным охватом и стоимостью.
Наиболее перспективными технологиями построения трехмерных моделей местности и объектов являются технологии наземного лазерного сканирования, так как они обладают рядом преимуществ: имеют большой объем избыточной информации за счет перекрытия сканов, имеется возможность практически полной автоматизации работ. Данная технология, появившись сравнительно недавно еще не приобрела должную популярность за счет своей малой изученности, но развитие данной технологии приведет к значительному сокращению трудозатрат в сравнении с традиционными методами построения трех мерных моделей.
Планируемые научные результаты
Результатом работы будет разработка методики проведения полного комплекса работ по применению наземного лазерного сканирования от установки прибора до получения 3-х мерной модели здания или сооружения. Окончательные выводы по результатам исследования планируется сделать к декабрю 2010г.
Обзор исследований и разработок по теме
Технология лазерного сканирования приобретает в мире все большую популярность. Большой прогресс был достигнут в области наземных лазерных сканеров в течение последнего десятилетия.
Число сканеров в настоящее время значительно возросло, которые позволяют измерять миллионы 3-D точек за считанные минуты. [2] Хотя обычно описания плотной поверхности трех мерных данных, полученных для выбранных объектов можно получит только с помощью фиксированного количества точек, стоит отметить, что существующие коммерческие системы находятся в стадии разработки, которые позволят получать плотные, крупно- масштабные 3-D облака точек от наземного лазерного сканирования с помощью движущихся платформ [2].
Технология лазерного сканирования является точным и эффективным способом сбора и представления пространственных данных на местности; она предоставляет богатую и достоверную информации о базовой конструкции зданий, позволяет следить за изменениями, др. Кроме того, одним из основных преимуществ этой технологии является то, что точка облака определяемая в измерении та же, что и существующая в реальном мире.
Работа : «Технология обработки металлов давлением. Классификация способов.»
... форму при практически неизменном химическом составе обрабатываемого материала. обработкой металлов давлением Обработка металлов давлением представляет собой важный технологический процесс металлургического ... выплавляемого металла. Развитие прокатного производства основывается на применении принципа непрерывности самого процесса и всех технологических операций (прокатка, термическая обработка, ...
Эта технология позволяет получить высокую точность трехмерного изображения, которые могут быть использованы в решении ряда задач:
- поверхностные и объемные задачи расчета;
— создание топографических карт, которые описывают контурной особенности границ объектов и контура местности;
Оптические системы лазерного сканирования основаны на передаче движущегося лазерного луча, отражающегося от поверхности объекта. Объект освещается лазерным лучом и идентифицирует точку, а затем отражается и принимается принимающей системой сканера. Для каждой отдельной точки определяется расстояние в известном направлении. Для каждой точки могут быть вычислены координаты X, Y и Z приведенные к внутренней системе координат лазерного сканера.
Одним из параметров, который влияет на точность каждой точки в облаке, по сравнению с другой это «пятна» лазерного луча. Точность улучшается, если размер пятна уменьшается. Другие параметры, которые влияют на точность каждой точки: расстояние, угол падения лазерного луча, свойства поверхности и т.д.
В Украине технологии наземного лазерного сканирования также имеют тенденции к активному развитию. Так например харьковское предприятие «Навигационный геодезический центр» ставит перед собой ряд задач решающихся при помощи технологии наземного лазерного сканирования, а именно применения лазерного сканирования для работы по сканированию памятников архитектуры, исторических зданий и монументов. Результатом выполнения таких работ могут быть данные о деформации сооружений, состоянии внешнего оформления, подготовка материалов для выполнения восстановительных работ. Не случайно первым объектом, на котором выполнялись работы по лазерному сканированию, стали пещеры Киево-Печерской Лавры. Трудно представить, какая еще технология позволяет выполнить высокоточные измерения в узких и неосвещенных коридорах пещер (рис. 2)[3].
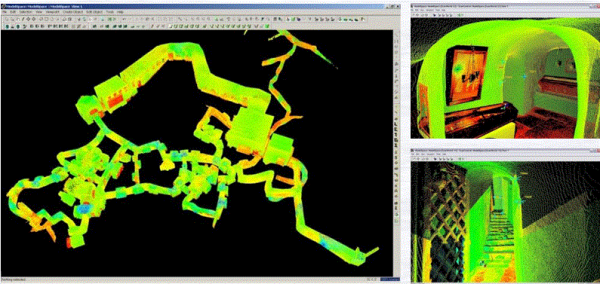
Рисунок 2 – Фрагмент моделей пещер Киево-Печерской Лавры
Широкое применение находит лазерное сканирование при строительстве и реконструкции зданий и сооружений. Выполнив всего несколько сканов, можно быстро определить соответствие элементов сооружения проекту, вычислить величины отклонений от заданных габаритов.
Сканирование внутренних помещений промышленных объектов позволяет решать задачи расчета объема, размещения крупногабаритного оборудования, составлять схемы инженерных коммуникаций внутри здания.
Интересные возможности дает сканирование в сфере оценки разрушений, деформаций поверхностей, наблюдении за оползнями, оценки последствий аварийных и катастрофических происшествий.
В Донецком Национальном Техническом Университете данным вопросом занималась магистр кафедры геоинформатики и геодезии Врачева Анна Александровна, темой её работы был анализ методов и геодезических технологий наземного лазерного сканирования.
В целом съемку при помощи наземного лазерного сканера можно разделить на две основные части: непосредственно само сканирование и постобработку полученных наборов данных. В свою очередь во второй части можно выделить три этапа работ:
Лазерное сканирование
... различных вариантов обработки трехмерных данных лазерного сканирования в инженерии, геодезии, строительстве и других областях применения. Всеобъемлющая полнота трехмерных облаков точек является основным достоинством по ... на штатив, сдвоенные на одной вехе - для удобного определения системы координат, с устанавливаемой призмой - для наилучшего взаимодействия с тахеометрическими измерениями. Все ...
— Как правило, во время съемки объекта, проводится несколько сканов для полного покрытия поверхности. Для создания единого скана необходимо произвести объединение (сшивку).
Существует множество методов сшивки сканов, с различной степенью автоматизации. Часто используется метод совмещения сканов по опорным точкам, которые отображаются на смежных сканах. В качестве таких точек могут быть использованы специальные призмы, светоотражающие пластины или наклейки, имеющие более высокий коэффициент отражения и потому вполне однозначно определяемые.
— Для точного представления нашего будущего чертежа или схемы необходимо задание определенной единой системы координат. Начало системы координат каждого отдельного скана, производимого с определенной точки, находится в центре измерительной головки сканера и разумеется, при каждом изменении его положения, оно меняет свое положение в пространственной системе координат. Для связи координат объекта, полученных из разных сканов, необходимо выбрать единую систему координат, определить в ней центр сканирования для каждого случая (например, с помощью электронного тахеометра) и трансформировать все полученные координаты в единую систему.
— Наиболее сложный и самый основной процесс обработки. Представление облаков точек математически описываемыми поверхностями. Если сканирование сопровождается цифровой видео- или фотосъемкой, то на этапе обработки можно совместить сканированное изображение объекта с его видео изображением, придав скану реальные цвета и текстуру.
Существуют различные алгоритмы определения плоскостей. В частности Andreas Rietdorf в своей работе «Automatisierte Auswertung und Kalibrierung von scannenden Messsystemen mit tachzmetrischem Messprinzip» (Munhen 2005) [4] в качестве критерия для решения, лежат ли точки на плоскости, выполнял расчет определителя. Исследуются соответственно два смежных треугольника, которые достаточно точно определяют плоскость.
Согласно его работы, к каждой грани треугольника должны искаться две следующих грани, которые имеют общую точку с первой. Таким образом, существуют 4 точки, которые определяют параллелепипед. Если смешенное произведение трех векторов, образованных четырьмя точками, равно нулю, то эти четыре точки лежат в одной плоскости. Таким образом, принадлежность какой-либо точки плоскости определяется из равенства нулю определителя образованного тремя векторами:
где 
- координаты точек однозначно определяющих плоскость.
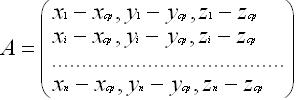
Рассмотрим другой алгоритм., Пусть есть матрица 
, состоящая из координат точек в пространстве XYZ. Проверим, принадлежат ли эти точки плоскости. Для этого преобразуем их так, чтобы они полностью лежали в плоскости ХY. Тогда для всех точек, принадлежащих плоскости, координата z будет равна 0. В случае если какая-либо точка не принадлежит плоскости, то матрица 
ПОСОБИЕ по наблюдению за деформациями опор мостов методом координат
... x i , yi , zi – координаты той же деформационной точки в i-м цикле измерений. Полное смещение в горизонтальной плоскости равно: [4] Скорость перемещений деформации определяется по формуле: [5 ... в виде векторной диаграммы (рисунок 3.1). Таблица 3.1 – Ведомость смещений опор моста. №№ точек Горизонтальные деформации Вертикальные деформации dx = x i +1 – x0 , мм dy i = yi +1 – y0 ...
будет наклонена на некоторый угол. Точка с максимальной по модулю координатой z будет являться ошибочной и ее необходимо исключить из дальнейших вычислений. Вычисления производят до тех пор пока
Рассмотрим преобразование координат точек составляющих матрицу  , . Геометрически это можно изобразить следующим образом: рис. 3.
, . Геометрически это можно изобразить следующим образом: рис. 3.
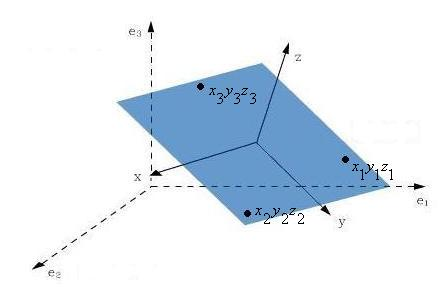
Рисунок 3 – Преобразование координат точек плоскости, здесь: система координат  – система, в которой находится плоскость; система координат x,y,z – это система координат, в которой точки лежат в плоскости ху.
– система, в которой находится плоскость; система координат x,y,z – это система координат, в которой точки лежат в плоскости ху.
Вычтем из каждой координаты матрицы 
средние значения (  ) по каждой из координат. Получим матрицу
) по каждой из координат. Получим матрицу 
, все точки которой будут рассеяны относительно центра тяжести[5]:
(1)
где 
- координаты обрабатываемых точек;
- количество обрабатываемых точек

, где 
- количество точек.
Умножим матрицу 
на 
получим симметричную матрицу 
Это необходимо для нахождения собственных векторов (
матрицы 
Поясним необходимость определения собственных векторов. Задачу преобразования координат можно свести к преобразованию базиса. Для этого каждую точку матрицы А будем рассматривать как вектор. Тогда согласно определению совокупность векторов пространства называется оператором. В результате преобразования базиса будут получены две различные матрицы соответствующие одному оператору, то есть они будут подобными. Подобные матрицы связаны между собой соотношением:
Принципы построения систем кабельного телевидения
... существующим или планируемым подземным коммуникациям. Кабельные линии системы кабельного приёма телевидения строятся таким образом, чтобы ... информации. Основным преимуществом системы УОС является простота построения декодирующего устройства. Система с управляющей обратной ... сигналов обратного направления, формируемых в различных точках магистральной и субмагистральной линией распределительной сети, ...
(2)
где 
- преобразованная матрица координат точек;
Если собственные числа матрицы 
попарно различны, то собственные вектора являются ортогональными и линейно независимыми, а, следовательно, их можно использовать в качестве базиса. Тогда формула (3) имеет следующий вид[5]:
(3)
Из рассмотренных алгоритмов наиболее полным является второй алгоритм, при помощи этого алгоритма можно учесть более точно неровности описываемых поверхностей.
Полученные результаты
В ходе выполнения работы осуществлен анализ различных технологий построения трех мерных объектов по результатам различных видов съемок, рассмотрены возможные алгоритмы построения трехмерных объектов по характерным точкам.
Было проведено сканирование помещения сканером фирмы Riscan, полученные сканы были трансформированы в единую систему координат. Обработка результатов производилась в сопутствующем программном обеспечении Riscan Pro.
Заключение
В ходе исследований были изучены различные технологии построения трехмерных объектов, рассмотрены методики выполнения наземного лазерного сканирования, выполнено сравнение с классическими технологиями съемок местности, зданий и сооружений. Проведен анализ алгоритмов построения трех мерных моделей местности зданий и сооружений. В процессе производимых исследований технология наземного лазерного сканирования показала себя с позитивной стороны, она является очень перспективной за счет большого сокращения трудозатрат, и высокой точности полученного результата.
Литература
[Электронный ресурс]//URL: https://drprom.ru/referat/nazemnyie-lazernyie-skaneryi/
- – Гис Геострой изыскания – Введение в технологию лазерного сканирования.
- Allen, S. Seeing into the Past: Creating a 3D Modehng Pipe¬line for Archaeological Visualization [ теkct] / S. Allen, P. Feiner, A. Troccoli, H. Bcnko, E. Ishak, B. Smith. — Department of Computer Science, Columbia University. New York, NY, 2004. – англ.
- – Панорама Харьков. Семинар «Современные геоинформационные технологии в Харькове», 29 октября 2009 года, г. Харьков
- Andreas Rietdorf «Automatisierte Auswertung und Kalibrierung von scannenden Messsystemen mit tachzmetrischem Messprinzip» — Munhen 2005
- Н.В. Ефимов «Краткий курс аналитической геометрии» — М., «Наука», 1969
- Д.В.Беклемишев «Курс аналитической геометрии и линейной алгебры» — М., «Физматлит», 2005
- Д.К.Фадеев, В.Н.Фадеева «Вычилительные методы линейной алгебры» — М., «Наука», 1963
- Crassidis, J.L. Sigma-point kalman filtering for integrated gps and inertial navigation [Blech-onic resource] / .I.L. Crassidis. -2005. — 24 p. — англ. Режим доступа
- – Cyra Technologies [Электронный ресурс]: официальный сайт компании GFK.
- A new calibration system of a non-metric digital camera [текст] / R. Matsuoka и др.// Procs. 6th Conference on Optical 3-D Measurement Techniques, pp. 130-137. Zurich, Switzerland. Sep¬tember 22-25, 2003.
- Наземное лазерное сканирование: монография / В.А. Середо-Н19 ВИЧ, А.В. Комиссаров, Д.В. Комиссаров, Т.Л. Широкова. — Новосибирск: СГГА, 2009. — 261 с. ISBN 978-5-87693-336-2