
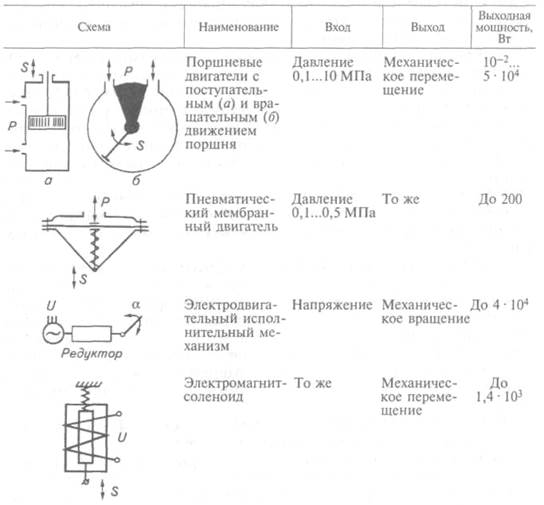
вала (табл. 1).
В гидравлических ИМ входная величина — перемещение управляющего устройства или давление жидкости на поршень р, а выходная — перемещение (поворот) выходного вала S
p 1
1.1. Гидравлические ИМ обладают очень большим быстродействием и выходной мощностью, и потому их применяют в системах автоматизации мобильных сельскохозяйственных машин и агрегатов.
1.2. Пневматические ИМ . По устройству аналогичны гидравлическим. Они получили широкое распространение благодаря высокой надежности, простоте конструкции и возможности получения достаточно больших усилий.
Крутизна статической характеристики пневматического ИМ находится в прямой зависимости от площади мембраны и в обратной — от коэффициента жесткости пружины (несколько возрастает по мере ее сжатия).
Соответственно, при малых изменениях выходного параметра S динамику механизма можно представить характеристиками безынерционного звена, причем коэффициент передачи которого несколько убывает с увеличением S.
Общие недостатки пневматических и гидравлических ИМ — сложность операций по их наладке и, главное, необходимость специальных компрессорных (насосных) установок для их питания.
1.3. Электродвигательные ИМ . В них используют электродвигатели постоянного и переменного тока, в том числе асинхронные двухфазные с полым ротором, с конденсаторами в цепи обмотки управления, а также асинхронные трехфазные двигатели. Исполнительные двигатели постоянного тока имеют независимое возбуждение или возбуждение от постоянных магнитов. Управляют этими двигателями, изменяя напряжение на якоре или на обмотке возбуждения (якорное или полюсное управление).
В большинстве конструкций электрических ИМ применяют двухфазные и трехфазные асинхронные двигатели.
Асинхронный двухфазный двигатель приближенно можно рассматривать как инерционное звено, если выходная величина — угловая скорость ротора, или как два последовательно соединенных звена — интегрирующее и инерционное, если выходная величина — угол а поворота ротора (табл. 1).
Значение коэффициента передачи зависит от способа управления двигателем, а постоянная времени — от сигнала управления, возрастая с уменьшением пускового момента двигателя от 0,1 до 0,2 с (для полого ротора с обмоткой типа «беличьей клетки»).
Дипломная работа расчет асинхронного двигателя
... 1.3 – Схема частотного преобразователя асинхронного двигателя Рисунок 1.4 – Выходной сигнал преобразователя частоты Преобразователи частоты ... напряжению питания подразделяются на однофазные и трехфазные, а но конструктивному исполнению на ... ротор в движение (вращение). Разница частот обычно называется скольжением. Его величина составляет порядка 2…10%. Очевидно, что двигатель в обычном режиме работы ...
Передаточная функция асинхронного трехфазного двигателя совпадает с ПФ инерционного звена.
Коэффициент преобразования и постоянную времени определяют по механической характеристике двигателя и рабочей машины.
Большинство электродвигательных ИМ работает в режиме, когда скорость перемещения не зависит от значения отклонения регулируемого параметра от заданного. Такой ИМ состоит из асинхронного электродвигателя, редуктора, концевых и путевых выключателей, датчиков (преобразователей), тормозного устройства и ручного привода.
Электродвигатель с редуктором служит для преобразования электрической энергии в механическую, достаточную для перемещения РО.
Концевые выключатели используют для отключения пускателя при достижении РО крайних положений, а путевые выключатели — для ограничения диапазона перемещения РО в автоматическом режиме.
Датчики положения формируют сигнал, пропорциональный углу поворота выходного вала ИМ. Этот сигнал используется индикатором положения на пульте оператора, а также, возможно, в качестве сигнала ОС по положению ИМ (для формирования П-закона регулирования, например).
Ручной привод обеспечивает возможность ручной перестановки РО при нарушениях работы электрической части механизма.
Включение-отключение электродвигателя по команде регулирующего устройства осуществляется через посредство электромагнитного или полупроводникового релейного устройства-пускателя.
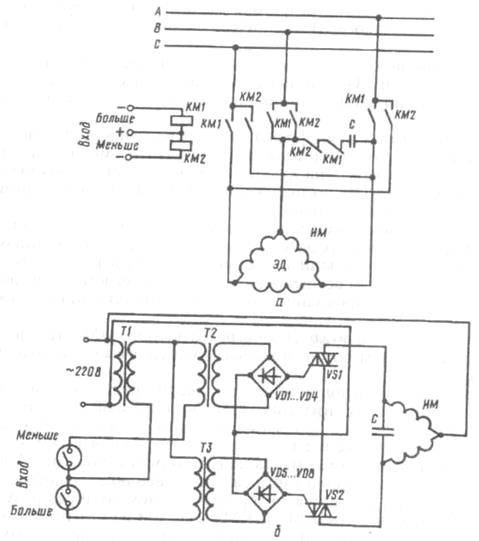
Реверс электродвигателя электромагнитного ИМ с трехфазным электродвигателем обеспечивается изменением схемы подключения двух фаз.
После размыкания силовых контактов (рис. 1, а) и отключения напряжения питания электродвигателя выходной вал ИМ останавливается не сразу, а продолжает в течение некоторого времени движение по инерции. Так называемый «выбег» может существенно ухудшать качество регулирования. Уменьшают выбег с помощью тормоза, представляющего собой электролитический конденсатор С, подключаемый через размыкающие блок-контакты КМ1 и КМ2 к одной из статорных обмоток электродвигателя. В результате этого в статорной обмотке появляется ток, наводящий в статоре магнитное поле, которое, взаимодействуя с вращающимся ротором, создает противодействующий вращению тормозной момент, уменьшающий выбег ИМ.
Главный недостаток электромагнитного релейного пускового устройства — невысокая надежность. Значительно лучшие характеристики имеет полупроводниковое релейное устройство (рис. 4.5, б).
Основу устройства составляют два тиристорных ключа на симисторах VS1 и VS2, которыми управляют с помощью сигналов «Больше» — «Меньше», вырабатываемых регулятором или оператором. Каждый из тиристорных ключей включен в цепь питания одной из статорных обмоток электродвигателя.
При отсутствии управляющих сигналов тиристорные ключи разомкнуты и электродвигатель неподвижен.
Включение симистора происходит в результате подачи на уп-
равляющий электрод отрицательного напряжения, вырабатываемого соответствующим выпрямительным мостом, питаемым от разделительного трансформатора Т2 (ТЗ) при наличии командного сигнала от регулятора или оператора.
Трансформатор 77 разделяет управляющие и силовые цепи. Реверсирование электродвигателя осуществляется изменением схемы подключения обмоток, при этом одна обмотка подключается к сети непосредственно, а вторая — через фазосдвигающий конденсатор С.
Ремонт оборудования распределительных устройств напряжением выше 1000 В
... мачтовых подстанциях напряжением 6--10/0,4 кВ. Распределительные устройства напряжением ,10 кВ выполняются закрытыми из сборных или комплектных ячеек, а РУ-35 кВ, как правило,-- открытыми. Ремонт оборудования ПЕРИОДИЧНОСТЬ РЕМОНТА И ...
Таким образом, движение ИМ может быть описано системой уравнений, соответствующих движению ИМ в сторону открытия, неподвижному состоянию и движению в сторону закрытия,
Рис. 1. Схемы управления ИМ:
- а — с трехфазным асинхронным электрическим двигателем; б — с однофазным конденсаторным электрическим двигателем
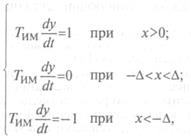
где Tим — время, равное времени движения ИМ из одного крайнего положения в другое; Д — зона нечувствительности релейного устройства.
Характеристика ИМ — существенно нелинейная, но линейные законы регулирования могут быть реализованы и с этим механизмом при использовании регулятора с импульсным выходом.
1.4. Электромагнитные ИМ . Они представляют собой соленоиды и электромагнитные муфты. Соленоидный ИМ — это катушка, втягивающее усилие которой при подаче управляющего сигнала U перемещает якорь на расстояние S, преодолевая сопротивление пружины.
Статическая характеристика электромагнитных ИМ, как правило, нелинейная, и их используют в системах позиционного регулирования.
Электромагнитные муфты могут быть фрикционными, порошковыми или асинхронными. Фрикционная муфта состоит из двух полумуфт, посаженных на ведущий и ведомый валы. В одной из полумуфт расположена обмотка возбуждения. При подаче на нее напряжения полумуфты сдвигаются и возникающая сила трения приводит их в движение. Такие муфты также применяют в системах позиционного регулирования и защиты оборудования при аварийных нарушениях его работы.
Принцип действия порошковой муфты основан на изменении вязкости ферромагнитной массы, заполняющей муфту. При подаче на катушку напряжения вязкость ферромагнитной массы возрастает и передаваемый момент увеличивается.
В муфтах скольжения момент вращения передается посредством магнитного поля, создаваемого обмоткой, расположенной на ведущей полумуфте. При ее вращении в ведомой полумуфте, как в роторе асинхронного двигателя, индуцируется ток, от взаимодействия которого с магнитным полем возникает момент вращения, увлекающий ведомую полумуфту за ведущей.
Порошковые и асинхронные электромагнитные муфты могут быть использованы и в системах непрерывного регулирования. В этом случае их характеризует ПФ инерционного звена с постоянной времени 0,03…0,25 с (для порошковых) и 0,11…0,45 с (для асинхронных муфт).
2. РЕГУЛИРУЮЩИЕ ОРГАНЫ
Устройство, позволяющее изменять направление или расход потока вещества или энергии в соответствии с требованиями ТП, называют регулирующим органом (РО).
Работоспособность РО определяется его характеристиками: диапазоном регулирования и рабочей расходной характеристикой.
Отношение максимального расхода среды G max к минимальному Gmin , соответствующему перемещению РО из одного крайнего положения h min в другое h max , называют диапазоном регулирования
Системы регулирования частоты вращения генераторных агрегатов
... один скоростной режим в пределах допустимого изменения частоты вращения Дn. Дизель-генератор и регулятор частоты вращения образуют замкнутую систему автоматического регулирования, ... скоростные. 1.3 Регуляторные характеристики АРЧ Регуляторная характеристика представляет собой зависимость частоты вращения n приводного двигателя от мощности Р генератора при фиксированном положении регулирующего органа ...
R = G max /Gmin
Зависимость расхода среды от положения РО h называют рабочей расходной характеристикой
G = f (h).
При разработке, выборе и наладке РО для обеспечения возможности эффективного управления ТП в широком диапазоне нагрузок и при разных режимах следует обеспечить достаточный диапазон регулирования и линейную рабочую характеристику в пределах этого диапазона. Используемые в сельскохозяйственном производстве РО можно разделить на три группы.
Регулирующие органы объемного типа (рис. 4.6, а).
Они изменяют расход среды за счет изменения ее объема (например, ленточные питатели-дозаторы компонентов
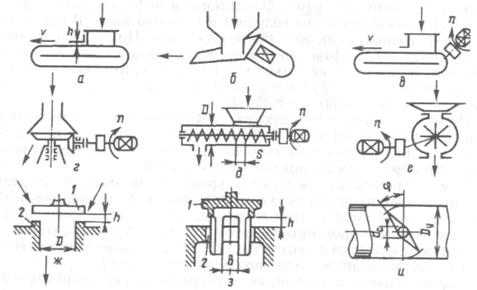
Рис. 2. Регулирующие органы:
- а — ленточный питатель (объемный);
- б — вибрационный питатель;
- в — ленточный питатель
(скоростной); г — тарельчатый питатель; д — шнековый питатель; е — секторный питатель-
ж — тарельчатый клапан; з — золотниковый клапан; и — поворотная заслонка
кормовых смесей).
Материал на ленту поступает непосредственно из бункера через воронку в его нижней части. На фронтальной грани воронки в вертикальных направляющих перемещается заслонка, посредством которой осуществляется регулирование производительности питателя.
Для исключения заклинивания ленты высота щели h между заслонкой и лентой должна быть не менее (2,5…3)г/тах, где dmax — максимально возможный размер частиц материала.
Регулирующие органы скоростного типа. Они изменяют производительность РО за счет изменения его частоты вращения. К РО этого типа относят устройства для регулирования частоты вращения вытяжных вентиляторов систем вентиляции животноводческих помещений, шнековых питателей-дозаторов и т. д.
В связи с большим разнообразием физико-химических свойств дозируемых компонентов кормов, других сыпучих материалов и условий, в которых работают эти РО, известно большое число конструкций их рабочих органов. Эти органы, как правило, состоят из активных элементов, обеспечивающих перемещение дозируемого материала, ограничивающих элементов, формирующих поток, и вспомогательных элементов.
Рациональный выбор рабочего органа и его конструктивное оформление в значительной степени обеспечивают надежность устройства и точность дозирования.
Вибрационные питатели (рис. 2, б) предназначены для подачи из бункера, не имеющего дна, мелко- и крупнокусковых материалов. Подачу материала регулируют изменением амплитуды выпрямленного напряжения, подводимого к электромагнитам питателя. Электромагниты, жестко связанные с корпусом лотка, заставляют его вибрировать с определенной частотой. Материал вследствие небольшого наклона лотка перемещается к его концу со скоростью, зависящей от амплитуды питающего напряжения. Достоинства вибрационных питателей — отсутствие вращающихся частей, плавное и практически безынерционное регулирование производительности.
Токи короткого замыкания в системах электроснабжения
... станций, т. е. нарушение нормальной работы всей электрической системы, что является самым опасным последствием короткого замыкания. Токи КЗ вызывают между проводниками большие механические усилия, которые ... которые индуктируют в фазах стато ра переменные, периодически изменяющиеся токи. Постоянные времени зату хания свободных токов ротора не зависят от активных сопротивлений статора. Свободные ...
Ленточные питатели (рис. 2, в) предназначены для выдачи сыпучих материалов с различными размерами фракций. Производительность питателя зависит от размеров фракций материала и скорости перемещения ленты v. Последнюю можно изменять с помощью частоты вращения электропривода или бесступенчатого вариатора, управляемого ИМ.
Тарельчатые питатели (рис. 2, г) предназначены для подачи из бункеров преимущественно мелкозернистых и мелкокусковых материалов. Тарельчатый питатель представляет собой круглый плоский диск (тарель), устанавливаемый под бункером и вращаемый специальным приводом желательно с возможностью регулирования частоты вращения п.
Между бункером и тарелью устанавливают манжеты и нож, с помощью которых осуществляется регулирование сечения потока материала. Более точное регулирование осуществляют поворотом ножа или изменением частоты вращения тарели. Производительность питателя зависит от изменения физических свойств материала, высыпающегося на тарель.
Шнековые питатели (рис. 2, д) более всего пригодны для выдачи мелкозернистых и мелкодисперсных материалов.
Производительность шнекового питателя пропорциональна квадрату диаметра рабочего винта D, шагу S и частоте его вращения п.
Секторные питатели (рис. 2, е) предназначены для выдачи мелкозернистых материалов. Основа конструкции секторного питателя — вращающийся барабан, разделенный радиальными перегородками на несколько секторов.
В частном случае (барабанный питатель) сектор может быть и один. Секторный питатель устанавливают под бункером. Материал выдается за счет поочередного заполнения и опорожнения секторов в процессе вращения ротора. Производительность регулируют, изменяя частоту n вращения рабочего органа.
Недостатком питателя является зависимость степени заполнения секторов от числа оборотов п вращения ротора.
Регулирующие органы дроссельного типа. Они изменяют расход вещества за счет изменения скорости и площади сечения потока жидкости или газа при прохождении его через дросселирующее устройство, гидравлическое сопротивление которого — переменная величина. Регулирующие клапаны (рис. 2, ж и з) отличаются формами плунжера 1 и седла 2.
Каждая конструкция характеризуется прежде всего зависимостью площади проходного сечения F клапана от положения плунжера.
Для тарельчатого клапана, показанного на рисунке 4.6, ж, эту характеристику называют конструктивной и рассчитывают по формуле ( h max = 0,25D )
![]()
где D — диаметр отверстия, м.
Для золотникового клапана (рис. 4.6, з) с прямоугольным сечением окон
![]()
где n — число окон; b и h — ширина и высота окна, м.
Системы программного управления промышленных роботов
... память системы управления робота, возможно переобучение его путем перепрограммирования на выполнение другого класса операций. Роботы второго поколения называют адаптивными. Системы управления этими роботами ... временным устройством - таймером (например, реле времени). Блок управления При программировании промышленного робота с ЦСПУ оператор включением программоносителей (штекеров, переключателей ...
Поворотные заслонки (рис. 4.6, и) круглой или прямоугольной формы предназначены в основном для регулирования расхода газообразных сред при малых перепадах давления на регулирующем органе.
Зависимость площади проходного сечения от угла поворота заслонки имеет вид
![]()
где D y — диаметр условного прохода круглой или равной ей по площади прямоугольной заслонки, численно равный внутреннему диаметру круглой заслонки, м; φ — угол поворота заслонки, изменяющийся от 0 до φmax .
Работоспособность системы автоматического управления в значительной мере зависит от правильности выбора регулирующего органа. Выбирают конкретный РО по данным справочников или каталогов в соответствии с наибольшим значением пропускной способности.
3. АНАЛОГОВЫЕ ЭЛЕКТРОПНЕВМАТИЧЕСКИЕ И ПНЕВМОЭЛЕКТРИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ
Электропневматический преобразователь типаЭПП-63.
Преобразователь ЭПП-63 предназначен для преобразования сигнала постоянного тока 0—5 мА в пропорциональный унифицированный пневматический сигнал 0,2— 1 кгс/см2. Принципиальная схема прибора приведена на рис. 3
При установившемся режиме постоянный ток, проходя по катушке 1, укрепленной на основном рычаге 5, создает усилие втягивания катушки в зазор постоянного магнита 2, которое уравновешивается на рычажной системе при определенном давлении в сильфоие обратной связи 6.
При изменении тока нарушается равновесие рычажной системы и рычаги 5 и 7, соединенные гибкой тягой 8, поворачиваются вокруг шарниров, изменяя зазор между соплом 3 и укрепленной на основном рычаге заслонкой 4. Это вызывает изменение давления в междроссельной
камере А, вследствие чего нарушается равновесие дифференциальной мембраны 9, и шток, жестко связанный с мембраной, изменяет степень открытия клапана 11. При этом начинает изменяться давление в камере выхода Б и в сильфоне обратной связи. Равновесие рычажной системы восстановится при определенном соотношении между выходным давлением и входным током при новом соотношении давлений в выходной и междроссельной камерах, что соответствует новым значениям перепадов давлений на постоянных дросселях 10 и 12.
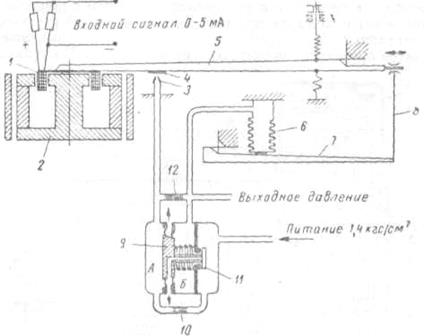
Рис. 3. Принципиальная схема электропневматического преобразователя ЭПП-63
Основная допустимая погрешность выходного сигнала не превышает ±1% от диапазона его изменения. Пневматическая часть прибора питается сухим и чистым воздухом давлением 1,4 кгс/см 2 , длина трассы передачи пневматических импульсов до 300 м, расход воздуха 2 л/мин. Габаритные размеры прибора 194 X 166 X 375 мм. Изготовитель: Опытный завод «Энергоприбор», Москва.
Кодовый электропневмамческий преобразователь КЭПП-2М. Прибор предназначен для преобразования электрического параллельного восьмиразрядного двоичного кода в пневматический аналоговый сигнал 0,2— 1 кгс/см2. Управление преобразователем осуществляется от вычислительной машины. Принцип действия прибора основан на суммировании расходов воздуха, проходящего через параллельно включенные дроссели с различными условными проходными сечениями при постоянном перепаде давления на них, при этом предусматривается автоматический сдвиг начальной точки диапазона преобразования. Преобразователь состоит из семи регулируемых разрядных дросселей, настроенных так, что их условные проходные сечения относятся, как 1 : 2 : 4 : 8 : 16 : 32 : : 64, электропневмопреобразователей, отключающих или подключающих разрядные дроссели, следящей системы нулевого опорного давления и схемы автоматического сдвига начала преобразования. Пневматическая схема задатчика выполнена на базе универсальной системы элементов промышленной пневмоавтоматики.
Система автоматизированного управления компрессорным цехом компрессорной станции
... постоянного тока; 21 — аптечка; 22—24 — места для приема пищи. Он должен быть оснащен средствами связи и телемеханики; пультами, панелями и щитами СЦКУ компрессорных ... автоматизированных систем управления технологическими процессами ... параметров, измерительные преобразователи и исполнительные ... оборудования компрессорных станций магистральных ... начальником департамента автоматизации, информатизации, ...
Напряжение питания 27 В постоянного тока, номинальный ток управления не более 150 мА. Давление питания 1,4 кгс/см2, объемный расход воздуха не более 8 л/мин. Основная погрешность —1,5%.
Изготовитель: Завод приборов, Усть-Каменогорск.
В качестве электропневматического аналогового преобразователя может быть использован также преобразователь ферродинамический функциональный ПФФ, работающий с выходным пневматическим преобразователем ПП.
Пнэвмоэлектрический преобразователь типа ПЭ-55М.
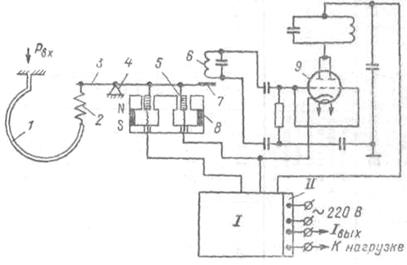
Прибор предназначен для преобразования унифицированного пневматического сигнала (0,2—1 кгс/см 2 ) в унифицированный электрический сигнал постоянного тока (0—5 мА).
Измерительным элементом преобразователя является манометрическая трубчатая одновитковая пружина 1 (рис. 4).
Преобразование перемещения ее конца в усилие осуществляется с помощью спиральной пружины 2, которая укреплена на рычаге 3, вращающемся вокруг оси 4. На рычаге 3 укреплен также медный диск 7, который находится в высокочастотном поле плоской катушки 6, входящей в базовый контур генератора 9. Генератор выполнен двухконтурным по схеме с общим коллектором. При перемещении коромысла изменяются параметры базового контура, что приводит к изменению режима генератора. Изменение режима генератора вызывает изменение постоянной составляющей коллекторного тока и тока базы, а следовательно, и выходного тока. В цепь коллектора включена катушка обратной связи 5, укрепленная на рычаге 3 в поле постоянного магнита 8. Выходной ток, обтекая катушку 5, создает момент обратной связи, противоположный моменту, создаваемому пружиной 2, вследствие чего коромысло будет перемещаться до наступления нового состояния равновесия.
В блоке / собраны электрические элементы, обеспечивающие питание генератора, фильтрацию выходного тока и стабилитроны для смещения нуля. На соединительной колодке 11 роме зажимов для подключения питания и нагрузки, имеются клеммы, предназначенные для проверки исправности преобразователя.
Класс точности преобразователя 1. Пневматическая часть прибора питается сухим и чистым воздухом давлением 1,4 кгс/см 3 , электрическая часть — переменным током напряжением 220 В, потребляемая мощность 5 В-А. Суммарное сопротивление проводов и нагрузки не должно превышать 2,5 кОм. Преобразователь выпускается в пыле-защищенном и брызгонепроницаемом исполнении. Габаритные размеры 314 X 220 X 132 мм. Изготовитель: Чебоксарский завод электрических исполнительных механизмов.
Автоматическое управление. Следящие системы
... системы автоматического регулирования корректирующие цепи. Рисунок 2 Рассмотрим пример следящей системы. В данной системе элементом сравнения служит потенциометрический мост ПМ, питаемый постоянным напряжением, а в качестве усилителя применен усилитель постоянного тока ...
Рис. 4 Принципиальная схема пневмаэлектрнческого преобразователя ПЭ-55М
4. ЭЛЕКТРОПРИВОДЫ, ПРИМЕНЯЕМЫЕ В СИСТЕМАХ ЧИСЛОВОГО ПРОГРАММНОГО УПРАВЛЕНИЯ И В РОБОТОТЕХНИЧЕСКИХ КОМПЛЕКСАХ
Управление исполнительными механизмами осуществляется с помощью систем привода, преобразующих сигналы управления в соответствующее состояние механизма. Робототехнические комплексы и оборудование с ЧПУ представляют собой сложные устройства, содержащие большое количество механизмов с различными типами двигателей, работа которых организуется в соответствии с общей программой с целью получения требуемого результата наиболее эффективным путем. Отдельные механизмы снабжаются электрическим, гидравлическим или пневматическим приводом. Наиболее распространенным типом привода является электропривод.
Существующие системы ЭП классифицируются по различным признакам. Самым существенным из них является тип используемого электродвигателя, в соответствии с которым различают следующие классы электроприводов: 1) ЭП с двигателем постоянного тока; 2) ЭП с двигателем переменного тока; 3) ЭП с шаговым двигателем. Каждый из названных классов может быть подразделен на более мелкие группы в зависимости от конкретных типов электродвигателей и других признаков. С учетом основных функций механизма и режимов его работы различают ЭП зажимных устройств и устройств натяжения, ЭП систем стабилизации скорости, позиционный ЭП, следящий ЭП и др.
ЭП с двигателями постоянного и переменного тока используются в системах непрерывного и релейного управления для получения заданного закона движения. ЭП с шаговыми двигателями реализуют заданное движение как результат суммирования отдельных шаговых перемещений.
Шаговые двигатели имеют специфическую конструкцию, позволяющую фиксировать каждый шаг перемещения. По принципу действия ШД можно рассматривать как синхронный двигатель, позволяющий осуществлять синхронность движения при пуске и торможении, а также допускающий длительную фиксированную остановку с протеканием постоянного тока в обмотках ротора. В то же время ШД является аналогом обращенной машины постоянного тока с поворотом щеток коллектора, имитируемым коммутатором ШД.
ШД различаются по числу фаз, по типу магнитной системы и способу возбуждения. Наиболее распространенными являются многофазные ШД с числом фаз m , равным 3, 4 и 5.
По способу возбуждения ШД делят на следующие виды:
1) ШД с активным ротором (с электромагнитным возбуждением или магнитоэлектрические, т.е. с возбуждением постоянными магнитами);
2) индукторные ШД, имеющие зубчатый пассивный ротор с числом зубцов Z и гребенчатые зубчатые зоны статора. Каждая гребенчатая зубчатая зона
представляет собой выступающий полюс статора. В симметричной магнитной системе обмотки противоположных полюсов объединяются в фазы, так что число пар полюсов р статора равно числу фаз т . Число зубцов ротора Z n выбирается так: если ось какого-либо полюса статора совпадает с осью зубца ротора, то ось соседнего полюса статора оказывается сдвинутой относительно оси ближайшего зубца ротора на угол 2π/(mZp ).
При симметричной коммутации каждому переключению фаз соответствует угол поворота вектора намагничивающих сил а = 2π/m (электрических радиан) или аг = 2 π /2р (геометрических радиан).
Управление электроэнергетической системой
... систем управления к уравнениям состояния дискретных систем Дискретные системы управления содержат в структуре цифровые вычислительные устройства, входные и выходные сигналы которых поступают в определенные дискретные моменты ... с - доля мощности, соответствующая части высокого давления; Т J - постоянная инерции эквивалентного агрегата; К н - коэффициент, определяющий регулирующий эффект нагрузки; S ...
В результате переключения ротор займет новое положение, т.е. повернется на угол ам = 2π/mZ . Таким образом, механический шаг а оказывается меньше геометрического шага поля аг . Отношение aг /aм = mZp /2p называется электромагнитной редукцией (ЭР), а двигатель с ЭР, большей или равной 1, — редукторным.
Классификационным признаком индукторного ШД является постоянство потокосцепления контура возбуждения, который реализуется за счет постоянной составляющей тока обмоток фаз (самовозбуждение) или специальной обмотки возбуждения (независимое возбуждение);
3) индукторно-реактивные ШД, не имеющие отдельного контура возбуждения. При разнополярном управлении такие ШД развивают только реактивный момент, пропорциональный квадрату переменной составляющей тока фазы. При однополярной коммутации возникают одновременно реактивный и активный, или индукторный, момент, пропорциональный постоянной составляющей тока в фазе;
4) реактивные ШД, электромагнитный момент которых является реактивным независимо от наличия или отсутствия постоянных составляющих тока в фазах.
5. Список используемой литературы
[Электронный ресурс]//URL: https://drprom.ru/referat/pnevmoelektricheskie-preobrazovateli/
1. «Автоматизация технологических процессов». Бородин И.Ф., Скудник Ю.А. 2004г.
2. Справочное пособие «Автоматические приборы, регуляторы и вычислительные системы»
3. «Системы программного управления производственными установками». Ильин О.П.
4. «Теория автоматического управления». Под ред. Воронова А.А.
5. «Основы теории автоматического управления». Воронов А. А.
6. «Линейные автоматические системы». Макаров И.М., Менский Б.М.