
Исключительное значение электротехники в наши дни объясняется тем, что средствами электротехники относительно просто решаются важнейшие технические проблемы в во всех отраслях (промышленности, быту, транспорте, передачи информации, медицине и т.д.) например передача на дальние расстояния и преобразование больших количеств энергии и передача сигналов на практически неограниченные расстояния.
Электротехническая промышленность выпускает в год миллионы электрических машин для всех отраслей народного хозяйства. И конечно же от специалистов в области электромеханики требуются глубокие знания обслуживания и ремонта электрических машин, а также их правильной эксплуатации. Без электрических машин не может развиваться ни одна комплексная научная программа. Электрические машины работают в космосе и глубоко под землей, в океане и активной зоне атомных реакторов, в животноводческих помещениях и медицинских кабинетах. Без преувеличения можно сказать, что электромеханика определяет технический прогресс в большинстве основных отраслей промышленности.
Прогресс в развитии электромашиностроения зависит от успехов в области теории электрических машин. Глубокое понимание процессов электромеханического преобразования энергии необходимо не только инженерам-электромеханикам, создающим и эксплуатирующим электрические машины, но и многим специалистам, деятельность которых связана с электромеханикой.
Возникновение электротехники как прикладной науке предшествовал довольно длительный период (начиная примерно с 16 века) накопления знаний об электричестве и магнетизма.
Начало практическому примеру электрического освещения положило изобретение в 1876 году П.Н. Яблочковым электрической свечи. Им же впервые был внедрен в практику переменный ток, осуществлено “дробление” электрической энергии посредствам трансформаторов с централизованного производства и распределения электроэнергии.
Работы М.О. Даливо–Добровольского, который изобрел трехфазный трансформатор и асинхронный двигатель (1889-1891 г.) и детально разработавшего технику трехфазной системы, которая по сегодняшний день остается основным способом передачи и распределения электроэнергии на всем земном шаре.
Электроэнергия является стержнем строительства экономики современного общества, играет ведущую роль в развитии всех отраслей народного хозяйства, в осуществлении всего технического процесса.
В настоящее время перед электромеханиками стоят трудные и интересные проблемы, которые требуют глубокого знания теории, проектирования и технологии изготовления электрических машин.
Роль отрасли сельского хозяйства в экономике XXI в
... разделение труда в области сельского хозяйства 1 Отраслевые особенности сельского хозяйства Сельское хозяйство, как отрасль экономики, имеет ряд характерных ... специфических особенностей. Учет этих особенностей и умелое применение механизма действия экономических законов могут иметь значительный эффект в хозяйственной деятельности аграрных предприятий. Первая особенность с/х отрасли экономики ...
1. СИНХРОННЫЙ ДВИГАТЕЛЬ
Синхронные двигатели имеют постоянную частоту вращения, и используется там, где нет необходимости в регулировании частоты или она должна быть постоянной. Синхронные двигатели имеют большую мощность (50–100 кВт и более) и применяется на металлургических заводах, в шахтах и других предприятиях для приведения в движение насосов, компрессоров и т.д. Достоинством синхронного двигателя является возможность его работы с емкостным (опережающим) током статора. Такой двигатель будет улучшать коэффициент мощности предприятия
Имеется также специальные синхронные микродвигатели мощностью от долей ватта до нескольких десятков ватт, используемые в схемах автоматики, звукозаписи, для вращения лент самопищущих приборов и в других случаях, требующих строгого постоянства частоты вращения.
Синхронная машина, работающая в режиме генератора или двигателя, может служить источником реактивной мощности.
Синхронный двигатель состоит из неподвижного статора и вращающегося ротора. В пазах статора размещена обмотка переменного тока, получающая питание от сети, а в роторе – обмотка постоянного тока.
В зависимости от мощности двигателя ротор выполняют с различной системой возбуждения. Синхронные двигатели средней и большой мощности выполняют с электромагнитным возбуждением. В этом случае расположенная на роторе обмотка возбуждения получает питание от источника постоянного тока через контактные кольца. Для двигателей малой мощности применяют постоянные магниты без обмотки возбуждения, что упрощает конструкцию ротора и повышает надежность двигателей.
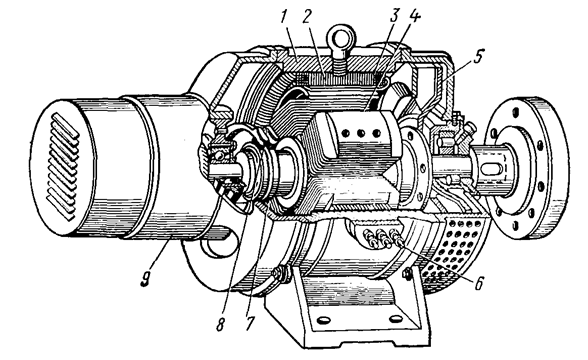
Рис.1 Устройство синхронного двигателя небольшой мощности:
1 – корпус; 2 – сердечник статора; 3 – обмотка статора; 4– ротор;
5 – вентилятор; 6 – выводы обмотки статора; 7 – контактные кольца;
8 – щетки; 9 – возбудитель.
Ротор синхронных двигателей выполняют с явновыраженными и неявновыраженными полюсами.
Явнополюсные, то есть с ровно выраженными полюсами, при котором каждый полюс выполняют в виде отдельного узла, состоящего из сердечника, полюсного наконечника и полюсной катушки. Все полюса закрепляют на ободе, являющимся также и ярмом, через которые закрепляются магнитные патоки полюсов. Сердечники полюсов явнополюсного ротора обычно собирают из штамповой листовой конструкционной стали толщиной 1 — 1,5 мм. Обод явнополюсного ротора выполняют массивным (литым или сварным) или же шлихтованным из листов конструкционной стали 1-6 мм. Листы стягивают шпильками.
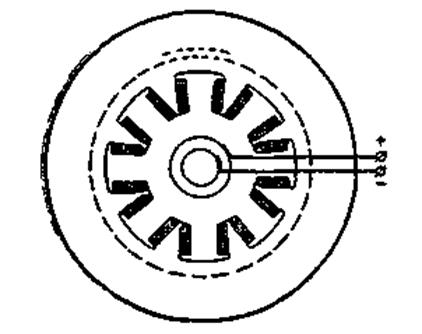
Рис.2 Явнополюсной ротор.
Неявнополюсной ротор имеет вид удлиненного стального цилиндра. Сердечник неявнополюсного ротора изготовляют в виде цельной стальной поковки в месте с хвостовиками или же делают сборными. Обмотки возбуждения неявнополюсного ротора занимает лишь две трети его поверхности (по периметру).
Оставшееся одна треть внутренности двигателя остается для ротора. Для защиты лобовых частей обмотки ротора от разрушения действием центробежных сил ротор с двух сторон прикрывает стальными бандажными кольцами (каплями) изготовленными обычно из немагнитной стали.
Асинхронный двигатель (2)
... масса, размеры и стоимость, чем асинхронному двигателю с короткозамкнутым ротором. Принцип работы асинхронной машины основан на использовании вращающегося магнитного поля. При подключении к сети трехфазной обмотки статора создается вращающееся магнитное поле, ...
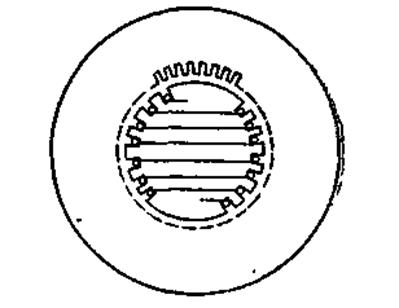
Рис.3 Неявнополюсной ротор.
2. ПРИНЦИП ДЕЙСТВИЯ СИНХРОННОГО ДВИГАТЕЛЯ
Оболочка статора синхронного двигателя подключается к сети переменного тока, а оболочка ротора к источнику постоянного тока. В синхронном двигателе момент на валу создается благодаря взаимодействию вращающегося магнитного поля статора и постоянного поля ротора. В отличие от асинхронного двигателя частота вращения ротора в синхронном двигателе не зависит от нагрузки и равна частоте вращения поля статора. Если ротор двигателя начнет вращаться с частотой, меньшей, чем частота поля статора, то в какой-то момент времени намагниченные полюса ротора расположатся против одноименных полюсов вращающегося поля статора. В этом случае нарушится связь между полюсами статора и ротора из-за их взаимного отталкивания.
Вращение ротора только с синхронной частотой – характерная особенность синхронных двигателей.
Для пуска синхронного двигателя в полюсных наконечниках ротора уложена пусковая обмотка, выполненная наподобие короткозамкнутой обмотки ротора асинхронных двигателей. Наличие ее позволяет пускать двигатель как асинхронный. При достижении ротором угловой скорости в его обмотку подает постоянный ток, и двигатель входит в синхронизм.
Также для пуска синхронных двигателей используют генераторы постоянного тока (имеющие общий вал с двигателем) либо тиристорные выпрямители, обеспечивающую более высокую (по сравнению с электромашинными возбудителями) надежность работы двигателя.
Синхронные двигатели малой мощности (до 2 кВт) иногда возбуждают постоянными магнитами или реактивным током статора.
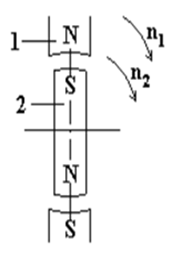
Рис.4 Принцип действия синхронного двигателя:
1 статор(катушка возбуждения);2 ротор.
3.ОБЩИЕ СВЕДЕНИЯ ОБ ОБМОТКЕ ДВИГАТЕЛЯ
Обмотка электрической машины является основной ее частью. Надежность машин главным образом определяется качеством обмоток. Поэтому к ним предъявляются высокие требования электрической и механической прочности, влагостойкости и нагрева-стойкости.
Обмотки электрической машины является система проводников, соединенных между собой по определенной схеме и вложены в пазы сердечника. Обмотка состоит из витков, катушек и катушечных групп, проводники которых изолируют от корпуса машин корпусной изоляции и друг от друга межвитковой изоляцией.
Виток обмотки состоит из двух последовательно соединенных между собой проводников, уложенных в два паза сердечника. Число витков обмотки определяется в зависимости от номинального напряжения в машине, в площадь сердечника их от мощности машины.
Катушка обмотки представляет собой несколько последовательно соединенных витков и уложенных соответствующими сторонами в два паза сердечника. Те части катушки, которые лежат в пазах сердечника, называются пазовыми (активными), а расположенные вне пазов лобовыми частями катушек. Катушки могут быть мягкими (намотанными из изолированного провода круглого сечения), или жесткими (намотанными или согнутыми из проводов прямоугольного сечения).
«Электрические машины» «Проектирование асинхронного двигателя» ...
... паза, занимаемого обмоткой: Для обмотки статора выберем провод ПЭТМ-155 с механически более прочной изоляцией, поскольку рассчитываемый двигатель должен иметь класс по нагревостойкости F и предполагается механизация обмоточных работ. Коэффициент заполнения паза ...
Катушечная группа состоит из нескольких последовательно соединенных катушек одной фазы, расположенных в соединенных пазах сердечника.
Для обмоток провода изготовленных из электротехнической отожженной краски ММ (медная мягкая) и МТ (медная твердая).
Провода изолируют хлопчатобумажной пряжей, лаками, стекловолокном и другим. Чаще всего применяют медные провода, покрытые эмалевой изоляцией. Например, провода ПЭЛ – эмалированные масленым лаком и покрытие одним слоем нитей из хлопчатобумажной пряжи, ПЭЛЛО – изолированы масленым лаком и одним слоем лавсановых нитей. Применяются так же обмоточные провода марок АПВ, АПБД, ПЭТВА, и др.
В качестве пазовой изоляции и прокладок применяют электроизоляционный картон и лакоткани.
Для защиты обмоток от механических повреждений чаще всего используют хлопчатобумажные ленты, пленочные материалы, стеклоленту.
Для пропитки изготовленных обмоток используют разные лаки на основе смол, битумов, высыхающих масел и т.д. Так для пропитки обмоток применяют масляно-битумные лаки. Они создают прочность, повышают влагостойкость и теплопроводность обмоток. Покрывные масляно-битумные и масляно-стойкие лаки создают на поверхности обмоток защитные влагостойкие, маслостойкие и термостойкие покрытия.
После ремонта обмотки электрических машин покрывают эмалью с целью повышения влагостойкости и маслостойкости обмотки. Для этого используют разные эмали, например, глифтале масляная, которая хорошо цементирует обмотку, повышает ее механическую прочность.
Обмотка электрических машин подразделяют на петлевые, волновые и комбинированные. Наиболее распространенные в статорных обмотках получили петлевые обмотки, а в фазных обмотках асинхронных машин — волновые.
Способы укладки обмотки в пазы зависит от формы пазов.
Закрытые пазы исполняют в фазных и короткозамкнутых роторах асинхронных двигателей. Провода в пазы вставляют с торца сердечника.
Полузакрытые пазы – в статорах машин переменного тока мощностью до 100 кВт, роторах и якорях машин мощностью до 15 кВт, провода круглого сечения всыпают по одному через узкую прорезь паза.
Полуоткрытые пазы применяют также в статорах машин переменного тока мощностью 120 – 400 кВт, а пазы вкладывают жесткие катушки, разделенные в каждом слое на две.
Открытые пазы используют в якорях постоянного тока мощность свыше 200 кВт, роторах асинхронных машин мощностью до 100 кВт и статорах асинхронных машин мощностью выше 400 кВт и крупных синхронных двигателей.
В пазы вкладывают жесткие катушки с удержанием их клиньями из дерева или других изоляционных материалов.
По способу заполнения пазов обмотки электрических машин могут быть однослойными и двухслойными. При однослойной обмотке сторона катушки занимает весь паз по его высоте, а при двухслойной только половину паза, в то время как другую половину этого паза заполняет соответствующая сторона другой катушки.
Тепловые двигатели и холодильные машины
... также тепловые машины, использующие теплоту, выделяющуюся в реакторе, где происходит расщепление и преобразование атомных ядер. Паросиловая станция. Для работы парового двигателя необходим ряд вспомогательных машин и устройств. ...
Роль межвитковой изоляции играет изоляция самого провода. Изоляция, отделяющая провода обмотки от корпуса, называют корпусной. Ее конструкция зависит от формы паза и напряжения машин и может быть гильзовой или непрерывной.
Гильзовая изоляция состоит из нескольких слоев изоляционного материала, уложенная в полузакрытые пазы перед укладкой обмотки. При полуоткрытых формах пазов прямолинейная часть проводов или катушек с гильзовой изоляцией обертывают несколькими слоями изоляционного материала. Слои обмоток и лобовые части скрепляют изоляционными лентами.
Обмотки машин напряжением выше 1000 В выполняются непрерывной изоляцией, выбранной в зависимости от класса нагревостойкости. Количество слоев определяется рабочим напряжением машины.
Иногда при ремонте обмоток электрических машин приходится использовать имеющиеся провода взамен отсутствующих проводов требуемых марок и сечений. В этом случае намотку катушек вместо одного провода приводят двумя и более параллельными проводами, суммарное сечение которых эквивалентно расчетному сечению.
Коэффициент заполнения паза проводами должен быть в пределах 0.7 – 0.75 мм, при коэффициенте более 0.75 мм укладка проводов будет затруднительна, а при коэффициенте меньше 0.7 мм провода свободно разместятся в пазах, но не будет использована мощность двигателя.
Ремонт обмоток проводи обмотчик на обмоточных участках ЭРЦ, которые имеют готовые элементы обмоток, получаемые с заводов – изготовителей или изготавливаемыми силами ЭРЦ. После определения характера неисправности обмоток приступают к их ремонту
4. КОНТРОЛЬ НАГРЕВА ЭЛЕКТРОДВИГАТЕЛЯ
Чрезмерный нагрев электродвигателей сокращает срок их службы.
Степень нагрева зависит от нагрузки электродвигателя и от условий и от режима его работы.
Под нагрузкой электродвигателя обычно понимают значение момента сопротивления на валу или значения пропорционально ему величины тока статора. Поскольку измерить момент двигателя в процессе его работы затруднительно, для контроля нагрузки измеряют ток статора и сравнивают его с допустимым значением.
Электроизоляционные материалы подразделяются на классы нагреваемости, для которых определена наибольшая допустимая температура при использовании их в электрооборудовании общего применения, длительно работающего в нормальных эксплуатационных условиях.
Так, для класса Y нагревостойкости наибольшей допустимой рабочей температурой является 90С. К этому классу относится непропитанные и недогруженные в жидкий электроизоляционный состав волокнистые материалы из шелка и целлюлозы. Для класса нагревостойкости A относится допустимой температурой является 105С. К классу A относится те же волокнистые диэлектрики, а также некоторые полиамидные пленки и смолы, древесные пластики, изоляция эмаль – проводов на масляно – смоляных лаках и т.д.
Для класса E наибольшей допустимой температурой является 120С. К этому классу относится пластмассы, синтетические органические пленки, компациды на основе эпоксидных и других смол.
Для класса B допустимая температура равна 130С. К этому классу относится материалы на основе слюды, асбеста, и стекло – волокна, применяемые в сочетании, с органическими связующими и пропитывают составами.
Для класса F максимальной рабочий температурой является 155С. К этому классу относятся материалы, на основе слюды, асбеста и стекловолокна применяемые в сочетании с кремне – органическими связующими.
Синхронный двигатель (2)
... МАЗ. В короткий срок эта продукция также нашла широкий рынок сбыта. двигатель электродвигатель синхронный неисправности 1.2 Организационная структура ОАО «КААЗ» I. Общие положения 1. Отдел ... выполнение ремонтов и правильное использование ремонтной службы производственными цехами. 3. Запрещать работу на оборудовании в случаях грубого нарушения правил технической эксплуатации, неудовлетворительного ...
Для класса H максимально допустимой температурой является 180С. К этому классу относятся Материалы на основе слюды, асбеста и стекловолокна, применяемые в сочетании с кремнийорганическими связующими и пропитывающими составами, кремне — органические эластомеры, а также соответствующие данному классу другие материалы и сочетания материалов
Для класса C максимальная рабочая температура допускается свыше 180С. К этому классу относятся слюды, кремне – органические материалы, стекло, кварц.
Технологические перегрузки рабочих машин или колебания напряжения в питающей сети ведут за собой увеличение тока в обмотках машин и превышение температурой обмоток выше допустимого для данного класса, в результате срок службы машин резко уменьшается.
Есть еще несколько других способов защиты от перегрева двигателей
Защита электродвигателей означает их автоматическое отключение пуско-защитными аппаратами с целью предотвращения выхода из строя при увеличении токов в обмотках выше допустимых. Выход из строя двигателя в большинстве случаев означает полное или частичное обугливание изоляции его обмотки при нагреве обмоточного провода большим током. Большой, свыше номинального, ток в обмотке двигателя появляется при длительной перегрузке его механизмом, при заклинивании механизма, а также при несимметрии напряжений в питающих проводах, зависящих от состояния сети, т. е. при аварийных режимах в сети. Одно из первых мест среди аварийных режимов занимает обрыв фазного провода в цепи питания двигателя. Обрыв может быть на линиях высокого и низкого напряжений, при обгорании контактов или зажимов в аппаратах высокого и низкого напряжений, при повреждении кабелей или проводов питания двигателей, обгорании зажимов на самом двигателе.
При обрыве фазного провода двигатель не запускается или при работе он останавливается и его обмотка обугливается
Распространенной защитой электродвигателей является защита тепловыми реле, которые монтируются в корпусах пускателей, если пускатели устанавливаются отдельно, или шкафах и на щитах. Правильно подобранные тепловые реле защищают двигатель от перегрузки, заклинивания, потери фазы, хотя предназначены они для защиты от перегрузки.
Недостаток защиты тепловыми реле заключается в том, что трудно подобрать реле из имеющихся в наличии для каждого двигателя так, чтобы ток теплового элемента реле соответствовал току двигателя. Также следует учесть, что тепловые реле сами требуют защиты от тока короткого замыкания.
Если соответствуют друг другу токи двигателя и уставки реле, это не значит, что реле надежно сработает, так как имеется разброс параметров реле с уставкой на один и тот же ток, поэтому реле нужно регулировать на специальном стенде, что не всегда возможно из-за отсутствия стендов и грамотных специалистов
Автоматы применяются для защиты двигателей, так как имеют расцепители максимального тока и тепловые расцепители, по принципу работы соответствующие максимальным и тепловым реле. Следует учесть, что не все автоматы имеют расцепители и поэтому не все они могут защитить двигатель от перегрузки. В схеме защиты автоматы обычно устанавливаются перед пускателем, где автомат служит для включения и отключения проводов и аппаратов, расположенных за ним по ходу электроэнергии в направлении двигателя, для защиты этих проводов и аппаратов от тока короткого замыкания и двигателя от тока короткого замыкания и перегрузки.
Техническая эксплуатация и ремонт двигателей постоянного тока
... вращения n (об/мин), М =9550P/n (10) Обсудим некоторые важные вопросы пуска и работы двигателей постоянного тока. Из уравнения электрического состояния двигателя следует, что I я = (U -- E)/Rя (11) В рабочем ... благодаря наличию коллектора при работе машины постоянного тока в двигательном режиме скорость вращения ротора не связана жестко с частотой сети, как в асинхронных и синхронных машинах, а может ...
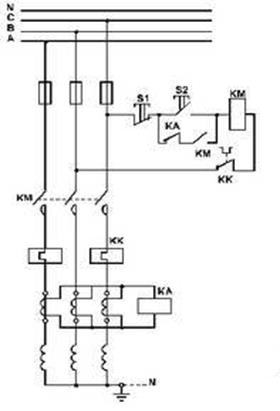
Рис.5 Схема подключения теплового реле к двигателю.
5. ПУСК СИНХРОННОГО ДВИГАТЕЛЯ
Пуск синхронного двигателя непосредственным включением в сеть невозможен, так как ротор из-за своей значительной инерции не может быть сразу увлечен вращающимся полем статора, вращения которого устанавливается мгновенно. В результате устойчивая магнитная связь между статором и ротором не возникает. Для пуска синхронного двигателя приходится применять специальные способы, сущность которых состоит в предварительном приведении ротора во вращение до синхронной или близкой к ней части, при которой между статором и ротором устанавливается устойчивая магнитная связь.
Пуск синхронного двигателя по средствам вспомогательного двигателя. Процесс протекает аналогично процессу включения синхронного генератора на параллельную работу ротор возбужденного синхронного двигателя посредствам вспомогательного (пускового) двигателя приводится во вращение, разгоняется до синхронной частоты вращения и с помощью синхронизирующего устройства подключается к сети. Затем вспомогательный двигатель отключают. Обычно мощность вспомогательного двигателя составляет 5-15% от мощности синхронного двигателя. Это позволяет пускать синхронные двигатели либо без нагрузки, либо при малой нагрузки на валу. Применение вспомогательного двигателя мощностью, достаточной для пуска синхронного двигателя под нагрузкой нецелесообразно, так как при этом установка получается громоздкой и неэкономичной.
В качестве вспомогательного двигателя обычно применяют асинхронный двигатель с фазным ротором при числе полюсов 2p. Это делается для того, чтобы можно было ротор двигателя привести во вращение с частотой близкой к синхронной. Для регулировки частоты вращения в цепь ротора синхронного двигателя включают регулировочный реостат. В настоящее время описанные способ пуска имеет ограниченное применение.
6. АСИНХРОННЫЙ ПУСК СИНХРОННОГО ДВИГАТЕЛЯ
Этот способ пуска возможен при наличии в полюсных наконечниках ротора пусковой обмотки (клетки), аналогичной успокоительной обмотке синхронного генератора.
Невозбужденный синхронный двигатель включают в сеть. Возникшее при этом вращающееся поле статора наводит в стержнях пусковой клетки ЭДС, которые создают токи. Взаимодействие этих токов с полем статора вызывает появление на стержнях пусковой клетки электромагнитных сил. Под действием этих сил ротор приводится во вращение. После разгона ротора до частоты вращения, близкой к синхронной (n = 0.95n).
Обмотку возбуждения подключают к источнику постоянного тока. Образующийся при этом синхронный момент втягивает ротор двигателя в синхронизм. После этого пусковая обмотка двигателя выполняет функцию лишь успокоительной обмотки, ограничивая качание ротора.
Чем меньше нагрузка на валу двигателя, тем легче его вхождение в синхронизм. Синхронные двигатели малой мощности, пускаемые без нагрузки на валу, иногда входят в синхронизм лишь за счет реактивного момента, т.е. даже без включения обмотки возбуждения.
С увеличением нагрузки момента на валу вхождения двигателя в синхронизм затрудняется. Наибольший нагрузочный момент, при котором ротор синхронного двигателя еще втягивается в синхронизм, называют момент входа в синхронизм. Синхронный момент при частоте вращения n2=0,95n, зависит от активного сопротивления пусковой клетки, т.е. от сечения стержней и удельного электрического сопротивления металла, из которого они изготавливаются.
Двигатель постоянного тока
... обмотки для установившегося режима. Потери и КПД. дипломная работа [336,8 K], добавлен 04.07.2014 Источник [Электронный ресурс]//URL: https://drprom.ru/diplomnaya/dvigateli-postoyannogo-toka-2/ Двигатели постоянного тока Принцип действия генератора и двигателя постоянного тока. Особенность применения электродвигателей ...
Следует обратить внимание что выбор сопротивления пусковой клетки, соответствующего значительному пусковому моменту и наоборот, при сопротивлении соответствующему небольшому пусковому моменту, момент входа в синхронизм увеличивается.
В процессе асинхронный пуск в обмотку возбуждения нельзя оставлять разомкнутой, пересекающей ее в начальный период пуска с синхронной скоростью, индуктирует в ней с ЭДС. В следствие большого числа витков обмотка возбуждения этих ЭДС достигается значения, опасных как для целостности изоляции самой обмотки, так и для обслуживающего на период разгона замыкают на активное сопротивление, примерно в 10 раз большее сопротивление обмотки возбуждения.
Замыкания накоротко обмотки возбуждения на время пуска двигателя не желательно, т.к. при этом обмотка ротора образует однофазный замкнутый контур, взаимодействия которого с вращающемся полем статора также создают дополнительный синхронный момент. Однако при частоте вращения, равной половине синхронной, этот момент становится тормозящим и создает «провал» в характеристике пускового (асинхронного) момента. Это заметно ухудшает пусковые свойства синхронного двигателя. При асинхронном пуске синхронного двигателя возникает значительный ток. По этому синхронных двигателей непосредственным при достаточной мощности сети, способной выдержать без заметного падения напряжения броски пускового тока пяти или семикратного значения. Если же мощность сети недостаточна, то можно применять пуск двигателя по пониженному напряжению (автотранспортный или реактивный).
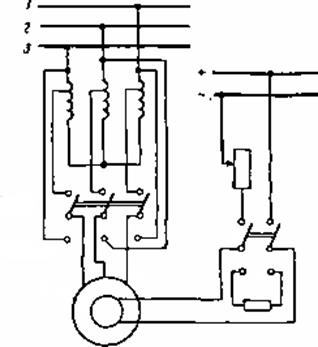
Рис.6 Схема Асинхронного пуска синхронного двигателя.
7. ОБСЛУЖИВАНИЕ И РЕМОНТ ЭЛЕКТРОДВИГАТЕЛЯ
Межремонтное обслуживание обязательно для электрических машин находящихся в эксплуатации. В порядке производственно-технического обслуживания осуществляют надзор за нагрузкой и вибрации электродвигателей, температурой их подшипников, контроль зад температурой входящего воздуха в защитных системах вентиляции, проверку отсутствия ненормальных шумов и искрения под щетками, уход за подшипниками и контроль количества смазки.
Перечисленные операции проводит дежурный персонал цеха. Этот же персонал систематично выполняет наружный осмотр и загрязнений.
Периодический осмотр электродвигателей проводит по графику, установленному главным энергетиком. Целью осмотров является определение технического состояния электродвигателя и выявлением объема работ, которые должны быть выполнены при очередном ремонте.
Кроме того, при осмотре проводят уход за подшипниками, коллекторами, кольцами, щетками и мелки ремонт без разборки машины.
Мелкий ремонт и устранение, и устранение незначительных неисправностей электродвигателей проводят во время плановых перерывов в работе технического оборудования (в обеденные перерывы, в нерабочие смены, в выходные дни).
К этим работам, выполняемым оперативно-ремонтным персоналам цехам относятся подтяжка резьбовых крепежных соединений и соединительных муфт, затяжка разъемных компактных соединений и фундаментных болтов, регулировка защиты и аппаратов управления, регулировка положения траверс, уход за коллекторами, кольцами и щеточными устройствами.
Принцип работы машин постоянного тока конструкция машин постоянного тока
... времени. Рис. 1. Поперечный разрез машины постоянного тока с кольцевой обмоткой якоря Конструкция машин постоянного тока Ста-тор машины по-стоянного тока состоит из станины и прикрепленных ... последователь-ной обмотки напряжение генератора с ростом тока I будет возрастать. Уровень повышения напряжения генератора с ростом тока I зависит от числа витков последовательной обмотки. Обмотку можно ...
Кроме указанных работ дежурный персонал цеха осуществляет постоянный контроль за состоянием изоляции и исправностью заземляющих устройств электроприводов. Ведет надзор за соблюдением правил технической эксплуатацией электродвигателей, и правил электробезопасности труда мотористов и производственных механизмов и технологического персонала цеха, а также принимает участие в приемосдаточных испытаниях электродвигателей и их систем управления и защиты после монтажа, ремонта и накладки.
В соответствии с Правилами технической эксплуатации в системе планового – предупредительных ремонтов электрооборудования (ППРЭО) существует два вида ремонтов: текущий, капитальный.
Текущий ремонт проводится с периодичностью установленной главном энергетиком для всех электродвигателей, находящихся в эксплуатации. В типовой объем работ при текущем ремонте входят следующие виды работ: наружный осмотр электродвигателя, промывка и замена смазки в подшипниках и при необходимости замена подшипников, проверка и ремонт вентиляторов и чистка вентиляционных устройств и каналов, чистка и продувка сжатым воздухом обмоток, контактных колец, коллекторов, щеточного аппарата, проверка состояния крепления лобовых обмоток, восстановление лакового покрова этих обмоток, шлифование контактных колец и коллекторов, регулировка щеточного аппарата, притирание и замена щеток, проверка и затяжка всех резьбовых крепежных соединений, проверка защитного заземления, проведение профилактических испытаний.
Капитальный ремонт проводят в условиях электроремонтного цеха (ЭРЦ) или специального ремонтного предприятия (СПР).
В объем капитального входят работы, предусмотренные текущим ремонтом. Он включает в себя также следующие виды работ: полную разборку электродвигателя, проверку всех узлов и деталей и их дефекация, ремонт станин и подшипниковых валов, вентиляторов, роторов, коллекторов, устранение местных дефектов изоляции обмоток и соединений, проведение послеремонтных испытаний.
Периодичность капитальных ремонтов электродвигателей правилами технической эксплуатации не устанавливается. Она примерно определяется лицом, ответственным за электрохозяйство предприятия на основании оценок общей продолжительности работы электродвигателей и местных условий их эксплуатации.
После транспортировки для монтажа электродвигателей на фундаментах производят следующие дополнительные работы: выверка положения электродвигателя и агрегата, крепление, подбивка оснований.
Частичная замена обмоток статора целесообразна в случае повреждения нескольких однослойных катушек или стержневых обмоток. Частичная замена двухслойных обмоток не целесообразна, так как при этом повреждается изоляция исправных катушек.
Провода, снятые с поврежденных электродвигателей в период ремонта, используют повторно. В этом случае необходимо восстановить электрические и механические параметры обмоток до их первоначальных значений.
Для очистки проводов от старой изоляции применяют обжигание в печах и механическое отделение остатков изоляции от провода волочением через деревянные или текстолитовые кницы. После рихтовки провода обматывают новой изоляцией на станках.
При ремонте статорных обмоток из жестких катушек медные провода прямоугольного сечения используют повторно. Изоляцию восстанавливают с помощью обматывания лентой внахлестку, перекрывая на половину ширины изолированной ленты. Замену коллекторов проводят лишь при значительных повреждениях (пяти и более коллекторных пластин) с пробоем и выгоранием изоляции.
Кроме того, коллекторы подлежат замене целиком, если запас размера коллекторных пластин по высоте не обеспечивает их естественного износа без уменьшения этого размера ниже допустимого предела за время до следующего капитального ремонта.
Перед включением электрической машины в работу дежурный электромонтер убеждается в отсутствии посторонних предметов на машине или внутри нее, проверяет состояние контактных колец или коллектора, положение рукоятки пускового реостата, которая должна быть в положении «Пуск». В небольших машинах провертывают ротор вручную. Устройство защиты, автоматического пуска и остановки, имеющие в схеме блокировки и управления, провертывают и регулируют в соответствии с инструкцией, утвержденной главным энергетиком предприятия.
Подготовка электрических машин к пуску после их ремонта проводится силами заводской электролаборатории в присутствии дежурного электромонтера. Проверяют наличие и нормальный уровень масла в подшипниках.
После пуска электрической машины контролируют нагрев корпуса машины и подшипников, вибрацию, шум и гудение, искрение на коллекторе, биение ремонтной передачи или соединительной муфты с механизмом.
Аварийная остановка работающей машины производится в следующих случаях:
- при несчастном случае, когда требуется остановка машины;
- при появлении дыма или огня из машины или пускорегулирующей аппаратуры;
- при поломке проводимого механизма;
- при сильной вибрации;
- при чрезмерном нагреве машины с заметным снижением частоты вращения.
8. ОСНОВЫ ЭЛЕКТРОБЕЗОПАСНОСТИ ПРИ ЭКСПЛУАТАЦИИ ЭЛЕКТРОДВИГАТЕЛЯ
Широкое применение электрической энергии привело к тому, что практически все взрослое население в своей жизни каждодневно соприкасаются с различными электроустановками. Как и все машины, и механизмы электроустановки могут являться источником травматизма.
При прохождении тока через тело человека происходит его нагрев, причем количество выделяющейся теплоты пропорционально квадрату тока. Чем больше напряжение, тем меньше сопротивление тела человека, тем больше ток. При больших токах поражение ткани нагреваются до 60-70С, при которой свертывается белок и возникает ожог.
Человек начинает ощущать на себе переменный ток при 0,6 – 15мА. Токи от 12 – 15мА вызывают сильные боли в пальцах и кистях. Человек выдерживает такое состояние 5 — 10с и может самостоятельно оторвать руки от электродов. Ток 20 — 25мА вызывают очень сильную боль, руки парализуются, дыхание затрудняется, человек не может, освободиться от электродов. При токе 50 – 80мА наступает паралич дыхания, а при 90 – 110мА паралич сердца и смерть.
Менее чувствительно человеческое тело к постоянному току. Его воздействие ощущается при 12 — 15 мА. Ток 20 — 25 мА вызывает незначительное сокращение мышц рук. Только при токе 90—110 мА наступает паралич дыхания. Самый опасный — переменный ток частотой 50 — 60 Гц . С увеличением частоты токи начинают распространяться по поверхности кожи, вызывая сильные ожоги, но, не приводя к электрическому удару.
В отношении поражения людей электротоком в «Правилах устройства электроустановок» различают:
1) Помещения с повышенной опасностью, характеризующейся наличия в них одного из следующих условий, создающих повышенную опасность:
А) сырой и проводящей пыли.
Б) токопроводящих полов.
В) высокой температуры.
Г) возможность одновременного прикосновения человека и имеющим соединения с землей метало конструкциями зданий, технологическим аппаратом и т.д.
2) Особо опасные помещения характеризуются наличием одного из следующих условий, создающих особую опасность:
А) особой сырости.
Б) химической активной среды.
В) одновременно наличие двух или более условий повышенной опасности.
3) Помещения без повешенной опасности, в которых отсутствуют условия, создающие повышенную опасность или особую опасность.
В качестве защитных мер при прикосновении к нетоковедущим частям применяют защиту заземления, зануления, двойную изоляцию, пониженное напряжение, защитные средства.
Защитным заземлением называют металлическое соединение с землей нетоковедущих металлических частей электрической установки (корпуса электрических машин, трансформаторов, реостатов, светильников, каркасы щитов, металлические оболочки кабелей, и т.д.).
Защитное отключение называют автоматическое отключение электроустановки системой защиты при возникновении опасности поражении человека электрическим током.
Под двойной изоляцией кабелей понимается дополнительная кроме основной изоляции, которая ограждает человека случайно от металлических нетоковедущих частей, могущих случайно оказаться под напряжением. Этот способ защиты чаще всего применяют в электрооборудовании небольшой мощности (электроизолированной ручкой инструмент, бытовые приборы и ручные электрические лампы).
Большую роль в обеспечении безопасности персонала играют различные защитные средства и предохранительные приспособления (резиновые диэлектрические перчатки, боты, галоши, коврики, изолирующие подставки, переносные заземления, временные ограждения, предупредительные плакаты, защитные очки и др.).
Важным для обеспечения безопасности является знания персоналом устройства и правила эксплуатации электроустановок, высокая трудовая дисциплина, поддержка в исправном состоянии электрооборудования, исправность связи сигнализации и блокировок, наличии защитных средств и средств пожаротушения.
Если, несмотря на все принятые меры безопасного ведения работ все же происходит поражения персонала электрическим током, то спасение пострадавшего в большинстве случаев зависит от быстроты освобождения его от действия электрического тока, также от быстроты и правильности оказания пострадавшему помощи.
Может оказаться, что пострадавший сам не в состоянии освободиться от действия электрического тока (отнять руку от токоведущих частей, отойти, оторвать провод, разомкнуть цепь).
В этом случае ему нужно немедленно оказать помощь, приняв меры предосторожности, что бы самому не оказаться в положении пострадавшего.
Необходимо отключить установку ближайшем выключателем или прервать цепь тока, перерезав провод с помощью инструментов с изолирующими ручками (нож, кусачки, топор и другие).
В условиях не позволяющих отключить установку для освобождения пострадавшего от действия электрического тока необходимо отделить его от токоведущих частей: в условиях напряжением до 1000В можно оттащить его за одежду, если она сухая, (при этом нельзя касаться руками тела пострадавшего, чтобы не оказаться вместе с ним под напряжением), можно воспользоваться изолирующими средствами (перчатки диэлектрические, коврик резиновый и другие) в некоторых случаях можно воспользоваться сухой деревянной палкой или доской, сухой одеждой.
Если пострадавший лежит на земле или на проводящем ток полу, следует изолировать его от земли, подсунув под него деревянную доску или фанеру.
После освобождения пострадавшего от действия электрического тока ему немедленно нужно оказать доврачебную помощь в соответствии с его состоянием. Для определения этого состояния необходимо провести следующие мероприятия:
1) уложить пострадавшего на спину на твердую поверхность.
2) Проверить наличие у пострадавшего дыхания.
3) Проверить наличие у пострадавшего пульса на лучевой артерии у запястья или сонной артерии на переднебоковой поверхности шеи.
4) Выяснить состояние зрачка (узкий или широкий) широкой зрачок указывает на резкое ухудшение кровообращения мозга.
Если пострадавший находится в состоянии, но до этого был в состоянии обморока, следует уложить в удобное положение, обеспечить полный покой, непрерывно наблюдая за его дыханием и пульсом.
ЗАКЛЮЧЕНИЕ
Почти вся электрическая энергия (на долю химических источников приходится незначительная часть) вырабатывается электрическими машинами. Но синхронные двигатели могут работать не только в генераторном режиме, но и в двигательном, преобразуя электрическую энергию в механическую. Обладая высокими энергетическими показателями и меньшими, по сравнению с другими преобразователями энергии, расходами материалов на единицу мощности, экологически чистые электромеханические преобразователи имеют в жизни человеческого общества огромное значение.
Наиболее распространенные асинхронные двигатели электрические, они просты в производстве и надежны в эксплуатации (особенно короткозамкнутые).
Их главные недостатки: значительное потребление реактивной мощности и невозможность плавного регулирования частоты вращения. Во многих мощных электроприводах применяют синхронные двигатели электрические. В тех случаях, когда необходимо регулировать частоту вращения, пользуются двигателями электрическими постоянного тока и значительно реже в этих случаях применяют более дорогие и менее надежные коллекторные двигатели электрические переменного тока. Мощность электрического двигателя от десятых долей Вт до десятков мВт.
СПИСОК ЛИТЕРАТУРЫ
[Электронный ресурс]//URL: https://drprom.ru/kursovaya/sinhronnyiy-dvigatel/
1. Вешеневский С.Н. Характеристики двигателей в электроприводе — М.: Энергия, 1977. — 425 с.
2. Гольдберг О.Д. Гурин Я.С. Проектирование электрических машин. — 2-е изд. перераб и доп. — М.: Высшая школа. — 2001.
3. Иноземцев Е.К. Ремонт и эксплуатация электродвигателя с непосредственным водяным охлаждением типа ЛВ — 8000/6000 УЗ — М.: Энергия, 1980 — 546 с.
4. Иванов И.И., Равдоник В.С. Электротехника: Учебник для вузов. — М.: Высшая школа, 1984. — 375 с.
5. Копылов И.П., Клоков Б.К., Морозкин В.П. Проектирование электрических машин: Учебное пособие для вузов — 3-е изд. перераб. и доп. — М.: Высшая школа, 2002 — 757 с.
6. Копылов И.П. Электрические машины: Учеб. для вузов. — 2-е изд., перераб. — М.: Высш. шк.; Логос; 2000. — 607 с.
7. Копылов И. П., Клокова Б. К. Справочник по электрическим машинам: В 2 т./ Т. 1 и 2.-М.: Энергоатомиздат, 1988.-456 с:
8. Столов Л.И., Афанасьев А.Ю. Моментные двигатели постоянного тока. — М.: Энергоатомиздат,1989. — 224 с.