
горячий водоснабжение бак регулятор температура
С развитием строительства жилых и общественных зданий и непрерывным улучшением культурно-бытовых условий жизни все больше увеличивается потребность в горячей воде. Горячую воду расходуют на бытовые и производственные нужды. В зависимости от назначения ее потребляют в смеси с холодной водой или самостоятельно.
Существует несколько способов получения горячей воды:
- в местных установках малой производительности (водогрейные колонки, газо- и электронагреватели, кипятильники, небольшие водогрейные котлы, гелиоустановки и др.);
- централизованно: а) в водоводяных или пароводяных подогревателях, располагаемых в тепловых пунктах на одно или несколько зданий;
- б) в районных котельных с раздачей горячей воды потребителям по наружным сетям, обслуживающим большие группы зданий, квартал, район, поселок;
- в) из теплосети при непосредственном разборе горячей воды потребителями.
Местные установки для приготовления горячей воды могут обслуживать одно или несколько водоразборных устройств (например, в пределах одной квартиры жилого здания).Такие системы горячего водоснабжения называют децентрализованными. Основными элементами их оборудования являются: генератор тепла, где сгорает топливо и нагревается теплоноситель; водонагреватель, где приготовляется горячая вода; трубопроводы теплоносителя; разводящие трубопроводы, подающие воду к водоразборным устройствам; дополнительные устройства (расширительный бачок, аккумулирующий бак-резервуар).
1. Описательный раздел
1 Описание системы ГВС
Системой водоснабжения здания или отдельного объекта называют совокупность устройств, обеспечивающих получение воды из наружного водопровода и подачу ее под напором к водоразборным устройствам, расположенным внутри здания или объекта. Система холодного водоснабжения, называемая обычно внутренним водопроводом, состоит из следующих устройств: ввода (одного или нескольких), водомерного узла (одного или нескольких), сети магистралей, распределительных трубопроводов и подводок к водоразборным устройствам, арматуры. В отдельных случаях в систему включают установки для повышения напора, а также установки для дополнительной обработки воды (умягчения, обесцвечивания, обезжелезивания и др.).
Система водоснабжения здания может быть присоединена к централизованной системе водоснабжения населенного пункта или оборудована устройствами для получения воды из местных источников водоснабжения (подземных или поверхностных).
Проектирование системы внутреннего холодного водоснабжения жилого здания
... водоразборную, смесительную, запорную и регулирующую арматуру. Для данного жилого здания по варианту задания проектируем только систему холодного хозяйственно-питьевого водоснабжения, ... напора В данном курсовой работе запроектирован внутренний водопровод для девятиэтажного жилого дома на ... внутреннего водопровода внутренний холодный водопровод канализация Аксонометрическую схему вычерчиваем в масштабе ...
По способу использования воды системы бывают с прямоточным водоснабжением, с оборотным водоснабжением и с повторным использованием воды. Применение систем с оборотным водоснабжением и с повторным использованием воды находит все большее распространение на промышленных предприятиях.
В зависимости от обеспеченности напором и установленного оборудования различают следующие системы водоснабжения.
Система, действующая под напором в наружном водопроводе. Ее применяют, когда гарантийный напор в наружном водопровода у места присоединения ввода постоянно больше напора, необходимого для нормальной работы всех водоразборных устройств, или равен ему. Такая система является самой простой и наиболее распространенной и характерна для зданий высотой до 5-6 этажей.
Система с водонапорным баком без повысительной насосной установки. Ее применяют, когда гарантийный напор в наружном водопроводе в часы с наибольшим водопотреблением ниже требуемого для здания, а в другие часы суток выше требуемого. В часы недостаточного напора потребители обеспечиваются водой из водонапорного бака, накапливающего ее в часы избыточного напора. Недостаток такой системы заключается в необходимости строительства технического этажа, расположенного выше последнего эксплуатируемого этажа.
Система с повысительной насосной установкой без водонапорного бака. Ее применяют, когда режим водопотребления в здании равномерен, а напор в наружном водопроводе постоянно или периодически ниже требуемого для здания. Повысительные насосы располагают в подвале зданий или в центральном тепловом пункте при застройке города целыми микрорайонами.
Система с водонапорным баком и повысительной насосной установкой. Ее применяют при недостаточности гарантийного напора и при отсутствии достаточного количества воды в наружном водопроводе и при неравномерном потреблении воды в здании в течение суток. Водонапорный бак, принимающий избыток воды или восполняющий ее недостаток при работе сети, включают в систему как регулирующую емкость для повышения экономичности работы повысительной насосной установки. При наличии бака повысительные насосы обычно автоматизируют.
В отдельных случаях вместо водонапорного бака применяют пневматическую установку, состоящую из водяного и воздушного баков или одного водовоздушного бака, оснащенных специальным оборудованием (компрессорами, клапанами, манометрами и др.).
Такая система водоснабжения называется системой с повысительными насосами и пневматической установкой.
Наиболее совершенными являются системы, имеющие повысительные насосы и гидропневмобаки, не требующие постоянной работы компрессора. Наличие гидропневмобака в составе автоматических насосных установок позволяет значительно уменьшить энергопотребление за счет сокращения числа включений насоса (насосов) и обеспечивать некоторый запас воды. Такие системы характерны для коттеджей и отдельных жилых зданий в городе.
1.2 Описание функциональной схемы регулятора
В настоящее время благодаря бурному внедрению микроконтроллеров автоматизируются все более сложные объекты. Поэтому для применения систем управления и авторегулирования от пользователя требуются определенные знания автоматики.
Право в системе социальных регуляторов
... взаимоотношении друг с другом. [11;123]. Глава 2. Социальные нормы как регуляторы право поведение государство социальный 2.1 Понятие и классификация социальных норм Для того, чтобы человек мог жить в ... норм, которые их регулируют. В своей совокупности существующие нормы представляют единую систему социального регулирования, в которой эффективность каждого вида норм наибольшей мерой оказывается только ...
Для описания систем автоматического управления (регулирования) обычно используется следующая структурная схема:
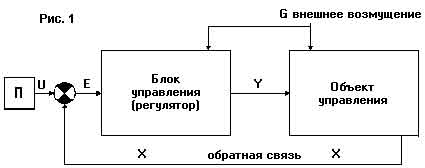
Рисунок 1. Обобщенная структурная схема САУ (САР)
где: U — уставка (программно задаваемая величина); X — контролируемая величина (состояние объекта); E — рассогласование; Y — управляющий сигнал; G — внешние возмущения; П — программная уставка (в частном случае оператор)
В процессе работы система автоматического регулирования (САР) сравнивает текущее значение измеряемой величины Х с заданием U (уставкой) и устраняет рассогласование Е (невязку).
Возмущающие воздействия G также устраняются регулятором. Например, при регулировании температуры в печи, уставкой U является требуемая температура воздуха, контролируемой величиной X — текущая температура, невязкой E является их разница, управляющей величиной Y является напряжение на теплонагревательном элементе (ТЭНе).
Программный задатчик П изменяет уставки в течение суток (режим термической обработки в печах, досвет в теплицах, изменение температуры помещения и пр.).
Его использование обычно не представляет особой сложности с позиции настройки и эксплуатации.
На температуру в печи влияют температура окружающей среды, открытая заслонка, состояние ТЭН и пр. Пользователю необходимо, чтобы температура в печи как можно точнее совпадала с уставкой.
Основной задачей при построении САР является выбор и наладка регулятора, адекватного объекту управления. Кроме того, необходим подбор соответствующих измерительных преобразователей (датчиков).
Для успешного решения этой задачи в первую очередь необходимо определить динамические свойства объекта управления.
По типу выходной величины регуляторы делятся на:
Непрерывные регуляторы, имеющие непрерывно изменяющуюся выходную величину.
а) Регуляторы с выходом по постоянному току или напряжению (Стандартный выход 0-5 мА или 0-10V) Выходная величина формируется цифроаналоговым преобразователем (ЦАП) и представляет собой неизменную величину в каждый интервал времени. Применяется редко, так как требуются дополнительные аналоговые схемы для вычисления коэффициентов. Следует иметь в виду, что при неточном задании коэффициентов настройки ПИД регулятор может иметь худшие показатели, чем Т — регулятор (релейный) и даже перейти в режим автоколебаний. Для типовых ПИД регуляторов известны простейшие аналитические и табличные методы настройки (например, две методики Цидлера).
Современные микропроцессорные приборы автоматически подбирают коэффициенты настройки регуляторов, такие регуляторы называются адаптивными. Адаптация производится:
- в процессе вывода состояния объекта на новое задание — U. В этом случае говорят о самонастройке или самооптимизации;
- в процессе стабилизации состояния объекта. Адаптивные регуляторы позволяют улучшить качество регулирования температуры, например, при изменении загрузки печи и состояния нагревательного элемента в процессе эксплуатации.
Однако можно отметить и недостаток адаптивных систем. В случае очень больших возмущающих воздействий параметры настройки могут “сбиться” и система на некоторое время может перейти в колебательный режим с запредельными значениями регулируемой величины Х.
Классификация систем автоматического управления и регулирования. ...
... управления, по которому САУ подразделяются на системы, неприспосабливающиеся к изменяющимся условиям работы объекта регулирования и приспосабливающиеся (или адаптивные) системы. Рис. 1.7. Классификация систем автоматического управления и регулирования ... с импульсной характеристикой: при непрерывном изменении входной величины выходная величина появляется только в определенные, дискретные, моменты ...
В любом случае для установки адаптивных систем требуется хотя бы грубое задание некоторых параметров: частоты опроса, максимального и минимального значения регулируемой величины Х, зоны нечувствительности.
Приборы, обычно, не требуют настройки после включения. Применение микросхем энергонезависмой памяти позволяет без применения элементов питания сохранять значение уставки при выключении или пропадании напряжения сети. Это значительно сокращает потери времени при включении и выключении оборудования.
1.3 Описание принципов работы регулятора
3.1 Регулирование
По характеру протекания технологических процессов объекты управления делятся на циклические, непрерывно-циклические и непрерывные. Локальные системы наиболее широко применяются для управления объектами второго и третьего типов.
По характеру установившегося значения выходной величины объекта при действии на его вход ступенчатого сигнала выделяют объекты с самовыравниванием и без самовыравнивания.
По количеству входных и выходных величин и их взаимосвязи объекты делятся не одномерные (один вход и один выход) и многомерные. Последние могут быть многосвязными — когда наблюдается взаимное влияние каналов регулирования друг на друга, либо несвязные — взаимосвязь между каналами которых мала.
Статические характеристики объекта управления устанавливают связь между установившимися значениями входа и выхода объекта. По виду статических характеристик объекты делятся на линейные и нелинейные. В последних статическая характеристика может быть гладкой, линеаризуемой в окрестности заданной точки, либо носить существенно нелинейный характер. При наличии в объекте нескольких нелинейностей, графическим методом определяется его суммарная нелинейная характеристика. Большинство систем регулирования относиться к классу систем автоматической стабилизации режима работы объекта относительно его рабочей точки (относительно номинального режима работы).
В этом случае в процессе работы отклонения переменных, относительно рабочей точки будут малы, что позволяет использовать линейные модели объекта управления. Однако, при смене рабочей точки происходит изменение коэффициента усиления объекта, что будет негативно влиять на динамику замкнутой системы.
Для системы автоматической стабилизации не обязательно определение полной статической характеристики объекта. Достаточно знать лишь динамический коэффициент усиления в окрестности рабочей точки. В тоже время на некоторых объектах управления необходимо знание всей статической характеристики процесса. Если она носит нелинейный характер, то с целью стабилизации общего коэффициента усиления системы, в замкнутый контур включают дополнительную нелинейность, обратную статической характеристике объекта. На практике такой подход реализуется путем использования регулирующих клапанов с различными видами расходной характеристики.
Курсовая работа описание характеристик консервной рыбной продукции
... рыбных консервов. Акцентируется внимание на товароведной оценке качества консервов, с помощью исследования предложенных образцов, которые приведены в экспериментальной части. Задача данной курсовой работы ... доминирует обычная рыбная продукция. Морепродукты ... консервной тары, могли бы вызвать порчу. При этом имеются в виду такие температуры ... работы. 1.Товарная характеристика натуральных рыбных консервов. ...
Реальные объекты занимают в пространстве какой-либо объем, поэтому регулируемая величина зависит не только от времени, но и от текущих координат точки измерения. Поэтому полное описание объекта управления будет состоять из системы дифференциальных уравнений с частными производными. При использовании точечного метода измерения одним датчиком, система дифференциальных уравнений с частными производными переходит в систему уравнений с обычными производными. Это существенно упрощает построение математической модели объекта, позволяя определить его передаточную функцию. Однако при наличии множества датчиков, распределенных например по длине объекта, может возникнуть необходимость использования множества управляющих сигналов (распределенное управление).
Объекты могут быть как стационарные и так и нестационарные. В нестационарных объектах параметры изменяются с течением времени (дрейфуют).
Примерами таких объектов могут быть химический реактор с катализатором, активность которого падает с течением времени, или аэрокосмический аппарат, масса которого по мере выгорания топлива уменьшается. Такие явления должны учитываться при проектирование соответствующих систем управления.
Известно, что лишь при наличии достаточно точной математической модели объекта можно спроектировать высококачественную систему управления этим объектом. Причем, согласно принципу Эшби, сложность управляющего устройства должна быть не ниже сложности объекта управления.
Поэтому основной целью построения математической модели объекта управления является определение структуры объекта, его статических и динамических характеристик. Особенно важно определение структуры для многомерных и многосвязных объектов управления. В тоже время для локальных объектов управления определение структуры может быть сведено к определению порядка дифференциального уравнения описывающего объект. Кроме того, оцениваются входные сигналы и возмущения действующие на объект (их статистические характеристики, точки приложения, максимальные амплитуды).
Значение этих характеристик позволяет выбрать структуру регулятора и рассчитать параметры его настройки, ориентируясь также на критерий качества работы этой системы.
Наряду с динамической частью W(p) в структуре объекта могут содержаться различные запаздывания в сигналах управления, измерения и состояния (рецикла) (Рисунок 2).
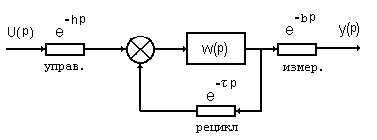
Рисунок 2. Объект управления с запаздыванием.
В промышленных объектах под рециклом понимается возврат части продукта с выхода объекта на его вход с целью повторной переработки. Большинство промышленных объектов управления имеют запаздывания. Наличие запаздывания объясняется конечной скоростью распространения потоков информации в технологических объектах (транспортное запаздывание).
1.3.2 Назначение и принцип работы основных элементов прибора ТРМ-1
Терморегулятор ОВЕН ТРМ1 предназначен для измерения, регистрации или регулирования температуры теплоносителей и различных сред в холодильной технике, сушильных шкафах, печах различного назначения и другом технологическом оборудовании, а также для измерения других физических параметров (веса, давления, влажности и т. п.).
Виды и принцип работы регуляторов
... Кроме того, сейчас появляется все больше регуляторов, реализующих законы управления на базе нечеткой логики нечеткий регулятор. Объект управления (ОУ) или объект регулирования - устройство, требуемый режим ... параметров. Однако часто тип регулируемого параметра жестко ограничен: регулятор давления, регулятор температуры, регулятор уровня, регулятор расхода и т.п. Это связано с тем, что ...
Класс точности 0,5/0,25
Основные функции измерителя-регулятора ОВЕН ТРМ1:
- Универсальный вход для подключения широкого спектра датчиков температуры, давления, влажности, расхода, уровня и т. п.
- Регулирование входной величины: двухпозиционное регулирование, аналоговое П-регулирование
- Цифровая фильтрация и коррекция входного сигнала, масштабирование шкалы для аналогового входа
- Вычисление и индикация квадратного корня из измеряемой величины (например, для регулирования мгновенного расхода)
- Выходной сигнал 4..20 мА для регистрации измеренной величины (модиф.
по типу выхода И)
- Возможность управления трехфазной нагрузкой (модиф. по типу выхода С3)
- Импульсный источник питания 90…245 В 47…63 Гц
- Встроенный источник питания 24 В для активных датчиков, выходных аналоговых устройств (ЦАП) и др.
- Программирование кнопками на лицевой панели прибора
- Сохранение настроек при отключении питания
- Защита настроек от несанкционированных изменений
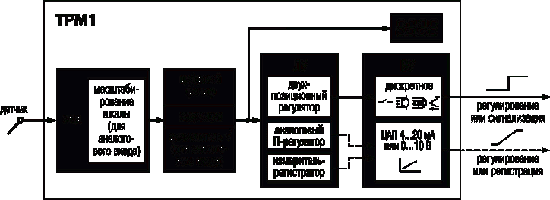
Рисунок 3. Функциональная схема прибора ТРМ1.
Терморегулятор ТРМ1 имеет один универсальный вход для подключения измерительных датчиков:
- термопар ТХК, ТХА, ТНН, ТЖК, ТПП(S), ТПП(R), ТВР(А-1, 2, 3), ТПР(В), ТМК(Т);
- активных датчиков с унифицированным сигналом тока 0…5 мА, 0(4)…20 мА или напряжения -50…+50 мВ, 0…1 В.
Все модификации прибора ОВЕН ТРМ1 имеют встроенный источник +24 В ± 10% для питания датчиков с унифицированным выходным сигналом или аналоговых выходных устройств.
Логическое устройство прибора ОВЕН ТРМ1 может работать в одном из 3-х режимов:
- двухпозиционный регулятор (компаратор, устройство сравнения);
- аналоговый П-регулятор;
- регистратор.
Режим работы ЛУ определяется типом установленного в приборе выходного устройства (ВУ).
Для работы ЛУ в режиме компаратора требуется выходное устройство дискретного типа (реле, транзисторный ключ, оптосимистор, выход для управления внешним твердотельным реле).
Для работы в режиме П-регулятора и измерителя-регистратора требуется цифроаналоговый преобразователь с выходным сигналом 4…20 мА или 0…10 В.
В терморегулятор ТРМ1 может быть установлено одно из перечисленных ниже выходных устройств (ВУ):
- ВУ дискретного типа — электромагнитное реле 8 А, транзисторная или симисторная оптопара, выход для управления внешним твердотельным реле;
- цифроаналоговый преобразователь выходного сигнала ЛУ в ток 4…20 мА или напряжение 0…10 В с питанием от внешнего источника.
Кроме того, прибор ОВЕН ТРМ1 имеет возможность управления трехфазной нагрузкой. Для этого в прибор устанавливается ВУ, представляющее собой три симисторных оптопары, имеющие схему контроля перехода через ноль.
Тип выходного устройства, установленного в терморегуляторе, выбирается пользователем при заказе.
При работе ЛУ в режиме двухпозиционного регулятора имеется возможность задания:
Автоматическое регулирование и управление двигателей внутреннего сгорания
... регулятора - системой автоматического регулирования (САР). Совокупность двигателя, как объекта автоматического управления, с прибором или комплексом приборов, осуществляющих процесс автоматизации управления, называется системой автоматического управления (САУ). Обычно для решения задач управления и регулирования двигателя ...
- времени задержки включения ВУ;
- времени задержки выключения ВУ;
- минимального времени удержания ВУ во включенном состоянии;
- минимального времени удержания ВУ в выключенном состоянии.
1.4 Описание алгоритма расчета
Для определения динамических свойств объекта на практике чаще всего используют методику снятия переходной характеристики, которая излагается ниже. В начальный момент требуется, чтобы система находилась в покое (т.е. контролируемая величина X (температура в печи) и управляющее воздействие Y (напряжение на ТЭНе) не изменялись, а внешние возмущения отсутствовали. Например, температура в баке оставалась постоянной и заслонка не открывалась. Затем на вход исполнительного органа подается ступенчатое воздействие, например, включается нагреватель. В результате состояние объекта начинает изменяться. Процесс изменения Х(t) — переходная характеристика изображена на рисунке 4.
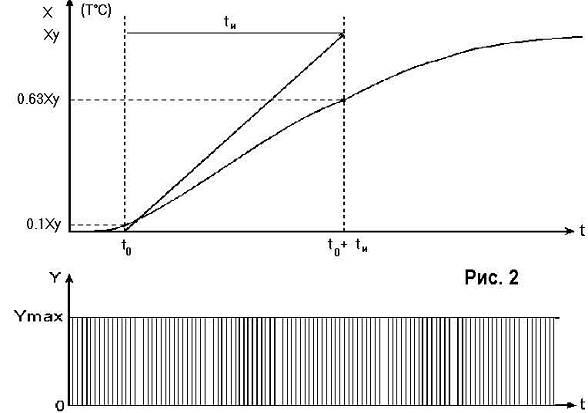
Рисунок 4. Переходная характеристика объекта регулирования
Ху — установившееся значение. Максимальное значение температуры в печи, которое может быть достигнуто при данной мощности нагревателя; tо — транспортное запаздывание. Время после включения нагревателя, за которое температура в печи достигнет значения 0,1Ху; tи — постоянная времени объекта. Достаточно точно может быть определено как время, за которое температура достигнет значения 0,63Ху минус tо; R — наклон разгонной кривой может быть определен по формуле R = Xу/tи
По виду переходной характеристики можно определить динамические свойства объекта: Ху, to, tи, R.
Для регуляторов с релейным выходом на объект подается 100% мощности. В ряде случаев длительное воздействие такой мощности недопустимо. В этом случае допускается выключение нагревательного элемента после определения to и R. При этом скорость изменения температуры достаточно точно можно определить после достижения величиной Х значения 0,3 Ху . Тогда скорость изменения температуры R и постоянная времени tи определяются по формуле: R = DT/Dt; tи = Ху/R. Значение Ху = Хmax определяется из паспортных данных объекта управления (например максимальная температура печи).
Исходя из соотношения tо/tи объекты делятся на:
- Объекты без запаздывания: tо/tи < 0,05.
- Объекты с большой инерционностью и с малым запаздыванием: tо/tи< 0.1.
- Объекты с существенным транспортным запаздыванием: tо/tи > 0.2.
Вышеперечисленные объекты устойчивы и обладают самовыравниванием, т.е. если подать ступенчатое воздействие Y меньше, чем Ymax, то установившееся значение Ху будет меньше Хmax. Существуют неустойчивые объекты без самовыравнивания. Например, вентилятор с асинхронным электродвигателем с жесткой характеристикой. При изменении напряжения питания двигатель или находится в заторможенном состоянии, или разгоняется до номинальных оборотов. Для каждого объекта управления необходимо применять регуляторы с соответствующим алгоритмом — законом регулирования. Это позволяет существенно снизить потери при функционировании объекта (расход энергии, потери продукции и пр.).
Исходя из соотношения tо/tи, выбирается тот или иной тип регулятора. На параметры объекта значительное влияние оказывает взаимное расположение исполнительных органов (ТЭНа) и первичного преобразователя (датчика).
Электронные регуляторы температуры
... для регулирования выявления отклонений от нужной в данной области применения температуры и предотвращения её критического изменения. Если температура объекта слежения понижается или повышается, регулятор должен ... с бойлерами, если в них такового не предусмотрено, тогда регулятор позволит регулировать температуру воды. Другие области применения терморегулятора это, к примеру, промышленность. В ...
Ситуация, когда требуется включать или выключать единственный нагреватель (охладитель) возникает наиболее часто. Для поддержания заданной температуры, при этих условиях, достаточно применить ТРМ-1 с датчиками ТСМ,ТСП или ТРМ-4 с датчиками ТХК, ТХА. Это недорогие терморегуляторы, имеющие один датчик, один канал регулирования и одно реле на выходе. Изменение температуры при использовании этих двухпозиционных терморегуляторов для работы с 2-киловатным нагревателем показывает график на рисунке 5 (пунктирная линия).
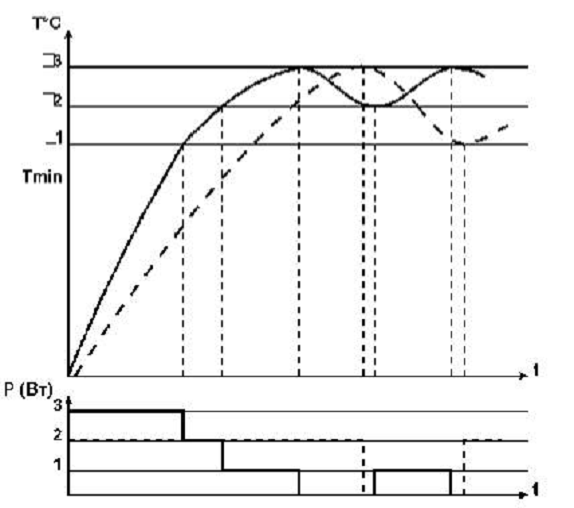
Рисунок 5. Рабочие характеристики двухпозиционных систем регулирования с одним (пунктир) и двумя (сплошная линия) нагревателями
Для более эффективной работы используют регуляторы с возможностью ступенчатого изменения мощности. Их отличают высокие динамические характеристики и экономическая эффективность. Для работы с печами или другими устройствами, требующими быстрого прогрева (охлаждения), предлагается ТРМ-7. В зависимости от температуры обьекта он включает первый или второй нагреватель (охладитель) или два одновременно. Схема управления при использовании ТРМ -7 показана на рисунке 6.
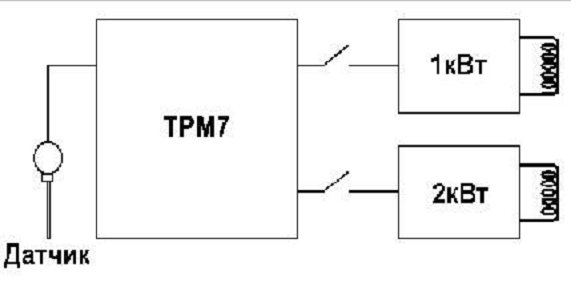
Рисунок 6. Функциональная схема регулятора с двумя нагревателями
График изменения температуры при нагреве печи с помощью ТРМ-7 изображен на рис. 1 (сплошная линия).
При достижении определенной температуры происходит поочередное отключение нагревателей. Очевидны более быстрый нагрев и более плавное поддержание температуры по сравнению с одноступенчатыми системами.
Другой пример — морозильная камера, которая быстро замораживает мясо двумя холодильными машинами и поддерживает температуру одной из них. При выходе из строя дежурной машины и повышении температуры в работу будет включена другая. Применение ТРМ-7 позволяет легко реализовать систему резервирования.
Если вы работаете с веществами, не допускающими перегрева или переохлаждения, например, масло, разогретое до температуры близкой к воспламенению, желательно использовать терморегулятор ТРМ-2. Его отличает наличие второго реле, которое служит как резервное или сигнальное в зависимости от включения. Это реле срабатывает по достижении предельной температуры.
Для работы с устройствами, требующими команды на открывание и закрывание, используется терморегулятор ТРМ-5. Он имеет один датчик и два канала регулирования. На каждом из каналов имеется своя уставка и выходное реле. В ТРМ-5 можно задать коридор изменения температуры ограниченный уставками первого и второго канала.
Если вам в процессе работы необходимо переходить с одной уставки на другую, то можно использовать прибор ТРМ-5 путем подключения нагрузки к соответствующему выходу. Пример использования — регулирование температуры в теплице при условии перехода с дневной на ночную и обратно. Если вы хотите осуществлять такой переход автоматически, то необходимо использовать ТРМ-8 и таймер в качестве управляющего элемента. Можно использовать кнопку для дистанционного управления или пользоваться кнопкой на приборе. Внешних переключений при использовании ТРМ-8 не требуется.
Качество горячей воды
... трубопроводы, разводящие горячую воду потребителям; сетевые устройства (компенсаторы линейных удлинений, воздухоотводчики); арматура (водоразборная, предохранительная, запорная); аккумуляторы (баки); насосные установки; контрольно-регулирующие устройства (регуляторы расхода, температуры). Сети трубопроводов систем ...
Для удобства наблюдения результатов приборы выпускаются с различными типами индикаторов. В зависимости от ваших производственных условий вы можете выбрать жидкокристалическую либо светодиодную индикацию. Последняя обеспечивает просмотр результатов при удалении от прибора и в плохо освещенных местах.
2. Расчетная часть
1 Расчет реакции объекта регулирования
Для расчета используется упрощенная модель бака:
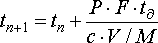
где tn+1 — температура воды в баке в будущий момент времени; tn — температура в текущий момент времени; P — мощность, выделяемая ТЭНом при максимальном воздействии регулятора; F — Выходная мощность регулятора в процентном выражении; tд — время дискретизации; с — теплоемкость воды; V — объем воды в баке; М — молярная масса воды.
Формула определяет величину температуры в следующий момент времени, прибавляя к предыдущему значению температуры приращение, создаваемое регулятором и ТЭНом заданный момент времени.
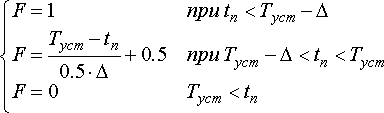
Реакция регулятора определяется моделью:
Для получения характеристики бака создадим таблицу опорных значений. Для этого рассчитаем их по имеющимся формулам.
Рассчитаем реакцию регулятора. Так как температура воды в баке (tn<Tуст-Δ) ниже полосы пропорциональности, то, как видно из (2) реакция регулятора будет максимальной
25<90-10
Fn = 1
Значение реакции регулятора занесем в таблицу и рассчитаем температуру в баке на следующий момент времени:

Новое значение температуры заносится в таблицу опорных значений, и теперь считается текущим значением температуры. Дальнейшие вычисления производятся аналогичным образом. В момент времени, когда температура воды в баке достигнет значения, входящего в зону пропорциональности, реакция регулятора будет рассчитываться по второй формуле модели. Например, на одиннадцатой минуте нагрева температура достигнет значения tn=86.3172, тогда расчет будет производиться по следующей схеме:
- Рассчитаем реакцию регулятора. Так как температура воды в баке (tn<Tуст-Δ) вошла в полосу пропорциональности, то, как видно из (2) реакция регулятора будет равна
90-10<82,3172<90

Значение реакции регулятора занесем в таблицу и рассчитаем температуру в баке на следующий момент времени:

Дальнейшие вычисления проводятся аналогично. Очевидно, что с приближением текущей температуры воды к значению уставки, реакция регулятора будет стремиться к нулю. Таким образом, расчеты можно закончить, когда реакция регулятора будет достаточно близка к нулю, и воздействие ТЭНа будет пренебрежительно мало. Однако стоит заметить, что полученная характеристика не может точно определить развитие процесса нагревания воды в баке, так как она не учитывает потерь тепла в окружающую среду и запаздывания показаний датчика, который расположен на расстоянии от нагревательного элемента. При реальном же монтаже подобной системы температура может даже превысить значение уставки, и тогда регулятор отключится полностью, что приведет к остыванию воды. Как только вода остынет, и её температура снова войдет в зону пропорциональности, ТЭН включится на небольшой мощности, и процесс разогрева начнется опять. Таким образом, в реальной системе будут наблюдаться колебания вокруг уставки, причем, чем дальше от нагревателя будет находиться термодатчик, тем большей амплитуды они могут достигать.
ЗАКЛЮЧЕНИЕ
В данной курсовой работе рассматриваются основные аспекты автоматического регулирования и поддержания параметров на заданном уровне. Математические модели накопительного бака и автоматического регулятора описывают принцип работы этих составляющих системы, однако из-за их упрощения не отражают всех особенностей при их реальном исполнении. Таким образом, чтобы спроектировать реально работающую систему регулирования нужно дополнить модели такими параметрами, как транспортная задержка передачи температуры воды от нагревателя к датчику, потери тепла через поверхность воды и материал бака, дополнительные возмущения и помехи. Усложнение модели приведет к дополнительным расчетам, и, несмотря на то, что эти модели могут дать более точные характеристики, принципиально процесс регулирования не поменяется.
На практике, зачастую, не требуется вести даже такие расчеты, потому что современные приборы для регулирования имеют функцию автоматической настройки и выбора параметров регулятора. От наладчика требуется умение прочувствовать процесс регулирования и определить, какие параметры необходимо подкорректировать. Для данной процедуры нет единого алгоритма, есть только рекомендации специалистов, багаж знаний и личный опыт.
СПИСОК ЛИТЕРАТУРЫ
[Электронный ресурс]//URL: https://drprom.ru/kursovaya/avtomatizatsiya-sistem-goryachego-vodosnabjeniya/
1 Конспект лекций
Программируемый контроллер S7-200. Системное руководство C79000-G7076-C233-02
4 Сайт о моделировании явлений и объектов: <http://model.exponenta.ru/>
- <http://www.aviorvl.ru/promautomat/tecno_doc.htm/>
- Корниенко Д.Г. по материалам Аркадия ЕРКОВА, Алексея ХОРОШАВЦЕВА
Федосов Б.Т. <javascript:function%20sm1()%7bk0=’mai’;k1=’lto:defbort@’;k2=’mail.kz?subject=Курсовая%20работа%20VisSim’;window.location=k0+k1+k2%7d;sm1()> «Задания и методические указания к выполнению курсовой работы по курсам «Системотехника» и «ТАУ» на тему: Анализ и оптимизация системы автоматического регулирования» Рудненский индустриальный институт Кафедра автоматизации технологических процессов и производств Рудный 2005.
Клюев А.С. Автоматическое регулирование. М., Энергия, 1973
Официальный сайт фирмы Visual Solution: <http://www.vissim.com/>
- Брюханов В.Н. и др. Теория автоматического управления. — М: Высшая школа, 2000 г.
Лукас В.А. Теория автоматического управления. — М.: Недра, 1990. — 416 с.
Н. В. Клиначёв. МОДЕЛИРОВАНИЕ СИСТЕМ В ПРОГРАММЕ VisSim Справочная система. 2001.(877 КБ) на русском языке. <http://model.exponenta.ru/vsmhlpru.zip>