
Совершенствование технологий и повышение производительности труда во всех отраслях промышленности относится к важнейшим задачам технического прогресса. Решение этих задач возможно лишь при широком внедрении систем автоматического регулирования и управления как отдельными объектами, так и производством.
Автоматические системы регулирования в настоящее время получили очень широкое распространение в технике. Множество технологических процессов в той или иной степени автоматизированы. Существует чрезвычайно большое разнообразие автоматических систем, выполняющих те или иные функции по управлению самыми различными физическими процессами во всех областях техники. В этих системах сочетаются весьма разнообразные по конструкции механические, электрические и другие устройства, составляя, в общем, сложный комплекс взаимодействующих друг с другом звеньев. Поэтому современному инженеру необходимо знать, каким образом функционируют САР.
В данной курсовой работе заданная система автоматического регулирования описывается математическими моделями. Рассматривается ее поведение при воздействии на нее различных сигналов. Также описывается способ регулирования системы.
Обоснование необходимости автоматизации
автоматический регулирование моделирование управление
Цель автоматизации — повышение производительности труда, улучшение качества продукции, оптимизация управления, устранение человека от производств, опасных для здоровья. Автоматизация, за исключением простейших случаев, требует комплексного, системного подхода к решению задачи, поэтому решения стоящих перед автоматизацией задач обычно называются системами, например:
система автоматического управления (САУ)
система автоматизации проектных работ (САПР)
автоматизированная система управления технологическим процессом (АСУ ТП).
Автоматизация технологического процесса — совокупность методов и средств, предназначенная для реализации системы или систем, позволяющих осуществлять управление самим технологическим процессом без непосредственного участия человека, либо оставления за человеком права принятия наиболее ответственных решений.
Основными целями автоматизации технологического процесса являются:
Повышение эффективности производственного процесса.
Повышение безопасности производственного процесса.
Математическое моделирование САР
2.1 Суть и цели математического моделирования САР
В общем случае под термином математическое моделирование автоматических систем понимаются процессы отыскания их математических моделей, а также непосредственного исследования и анализа этих моделей на основе методов теории автоматического управления и регулирования аналитически, графоаналитически или с использованием ЭВМ.
Пути повышения энергоэффективности технических систем зданий
... чердаков или переустройства бесчердачных кровель в чердачные, повышения технической эксплуатации систем отопления; автоматического регулирования отпуска теплоты на отопление; учета тепловой энергии ... Организация учета расхода энергоресурсов и управление энергопотреблением в зданиях и системах инженерного оборудования. 3. Диспетчеризация управления системами инженерного оборудования на уровне ...
Математическое моделирование технических систем, в том числе САУ и САР, базируется на математических моделях. Под термином математическая модель понимается записанная в форме математических соотношений совокупность знаний, представлений и гипотез о технической системе.
Первичной (исходной) формой представления математической модели любой САР является система дифференциальных и алгебраических уравнений, отображающих динамические свойства объекта регулирования и элементов системы, или экспериментально с использованием методов активного или пассивного эксперимента.
2.2 Разработка системы автоматического регулирования технологическим объектом управления (принципиальная схема САР)
автоматический регулирование моделирование управление
На рисунке 1 приведена САР температуры θ воздуха, подаваемого в зерносушилку из системы подогрева, включающей в себя теплогенератор 1 с форсункой 2 для распыления жидкого топлива и трубопроводы 3 и 4 для смешивания воздуха и топочных газов. Температура воздуха θ контролируется датчиком температуры — терморезистором R д , включенным в мостовую схему 5, с помощью резистора Ro задает требуемое значение температуры воздуха, подаваемого в сушилку. Посредством мостовой схемы также сравнивается напряжение U, пропорциональное температуре θ, с задающим напряжением Uo Сигнал разбаланса мостовой схемы ΔU=Uo -U усиливается электронным усилителем 6, выходное напряжение которого Uy управляется заслонкой 7 с помощью электромагнита 8. За счет соответствующего изменения количества топлива q, сжигаемого в камере 9 теплогенератора. Тем самым регулируется температура воздуха θ. Данная САР предназначена для управления температурой воздуха зерносушилки.
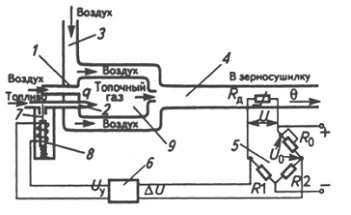
Рис. 1. Схема САР температуры воздуха, подаваемого в зерносушилку
2.3 Выявление управляющих и возмущающих воздействий и управляемых величин
Управляющим воздействием является сопротивление терморезистора R д , который является измерительным устройством и преобразует температуру Т в сопротивление R1. Задающим воздействием является сопротивление R задающего реостата, который тоже находится, как и терморезистор, в мосте сопротивлений 5.
Сравнивающим элементом также является мост сопротивлений 5. Результатом сравнения является разница между задающем напряжением U o и напряжением на управляющем терморезисторе ΔU=Uo -U.
Исполнительным элементом в данной САР являются форсунка с электромагнитом и теплогенератор. Усилитель электронный 6 предназначен для повышения уровня сигнала. Возмущающими воздействиями, которые связывают систему с внешней средой является: температура окружающей среды.
2.4 Разработка функциональной структурной схемы ФСС автоматического регулирования
Функциональная структурная схема — схема поясняющая взаимодействие и наличие элементов автоматики в данной, конкретной САР.
Система автоматического регулирования
... систем автоматического регулирования, как правило, выполняют на основе аналитических методов анализа или синтеза. На этом этапе проектирования систем регулирования на основе принятые допущений составляют математическую модель системы ... виде блока, но не отражает особенности его конструкции). носителями сигналов 1.2. Описание исходной схемы автоматического регулирования. Поскольку объект регулирования ...
Исходя из принципиальной схемы данной САР строим ФСС.
В данной схеме:
- теплогенератор — объект регулирования (ОР);
- терморезистор — воспринимающий элемент (ВЭ);
- мост сопротивлений — сравнивающий орган (СО);
- реостат — задающий элемент (ЗЭ);
- электронный усилитель — усилительное устройство (УУ);
форсунка — РО2
заслонка — РО1
Составляем ФСС.
Т а
R 0 ΔU Uy S q T
ΔR ΔT
Рис. 2. Функциональная схема САР
Классификация САР по признакам
Данная САР температуры воздуха подаваемого в зерносушилку, является замкнутой, как это показано на ее функциональной схеме.
Данная система является системой стабилизации, то есть целью регулирования является поддержание постоянного значения температуры атмосферы сушильного шкафа, а, следовательно, сопротивления термостата Rд, соответствующего задающему воздействию R.
Данная САР является непрерывной — сигнал рассогласования изменяется во времени по значению и знаку лишь в зависимости от значений задающего воздействия и регулируемой величины.
Система является одномерной, так как регулируется единственная величина — температура.
Будем рассматривать данную систему как стационарную и линейную, то есть использовать для ее описания обыкновенные линейные дифференциальные уравнения.
Компьютерное моделирование САР
3.1 Математическая модель САР
автоматический регулирование моделирование управление
Для того чтобы проанализировать данную систему необходимо составить ее математическую модель. Каждый элемент системы описывается некоторым уравнением. Это уравнение характеризует работу данного элемента. Точность математического описания системы определяется требуемой точностью регулирования. Чем точнее мы будем описывать элементы системы, тем сложнее получится математическая модель. Поэтому, необходимо найти разумный компромисс между точностью описания системы и сложностью ее математической модели.
Будем предполагать, что САР температуры воздуха является стационарной. Предположение о том, что все элементы системы с сосредоточенными параметрами и непрерывны во времени позволяет использовать для описания элементов системы обыкновенные дифференциальные уравнения с постоянными коэффициентами.
Так как многие элементы могут описываться нелинейными дифференциальными уравнениями, то решить их бывает сложно. Поэтому для описания системы применяется приближенная линеаризованная модель, в терминах передаточных функций.
Динамические свойства объекта регулирования и элементов САР описываются следующими уравнениями:
Т 0 ![]()
![]() k0 q (t-τ) + kв θа — объект регулирования;
k0 q (t-τ) + kв θа — объект регулирования;
Т д ![]()
![]() + U= kд θ — датчик температуры;
+ U= kд θ — датчик температуры;
ΔU=U 0 -U — сравнивающий орган;
U y =ky Uy — электронный усилитель;
X= k 3 Uy — заслонка и электромагнит без учета электромеханических переходных процессов;
q=k ф Х — форсунка.
Параметры — T 0 Tд и k0 kв kд ky k3 kф соответственно постоянные времени и передаточные коэффициенты, τ — время запаздывания.
Значения коэффициентов в соответствии с вариантом задания приведены в таблице 1:
Таблица 1. Значение параметров элементов САР
|
Вариант |
T 0 , с |
k 0 |
τ, с |
k в |
k д в/ºC |
k y |
k 3 мм/в |
k ф г/(c·мм) |
Θ а ºС |
|
|
4 |
230 |
1,3 |
17 |
0,3 |
23 |
0,025 |
80 |
0,35 |
2 |
-15 |
3.2 Передаточные функции
W01 (S)=![]()
![]() объект регулирования по регулирующему воздействию;
объект регулирования по регулирующему воздействию;
W02 (S)= ![]()
![]() объект регулирования по возмущающему воздействию;
объект регулирования по возмущающему воздействию;
Wy (S)= ky — усилитель;
W3 (S)= k3 — заслонка;
Wф (S)= kф — форсунка;
Wд (S)= ![]()
![]() — термодатчик;
— термодатчик;
— pτ — запаздывание.
3 Разработка структурной схемы САР
Структурная схема системы автоматического регулирования (САР) — это графическое изображение системы в виде совокупности частей, на которые её можно разделить по определённым признакам, и связей между частями с указанием направления передачи воздействий. Структурная схема САУ строится из элементарных динамических звеньев.
Составим структурную схему САР, которая полностью отображает динамические свойства САР. Структурная схема САР представлена на рисунке 3.
Рис. 3 Структурная схема САР
3.4 Разработка схемы структурного моделирования САР
При помощи ПК «МВТУ» составляем структурную схему моделирования САР. Для этого каждое звено исходной структурной схемы заменяем соответствующим блоком из общетехнической библиотеки ПК «МВТУ». Полученную схему представим на рисунке 4.
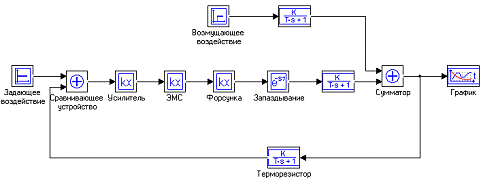
Рис. 4. Структурная схема моделирования САР
3.5 Этапы моделирования САР, выбор метода и параметров интегрирования
Для получения графика переходного процесса необходимо последовательно реализовать 6 этапов:
заполнение схемного окна типовыми блоками;
проведение линий связи для получения схемы структурного моделирования;
введение параметров в каждый типовой блок;
введение параметров интегрирования;
пояснительные подписи на схеме моделирования;
открытие графического окна и получение графика переходного процесса.
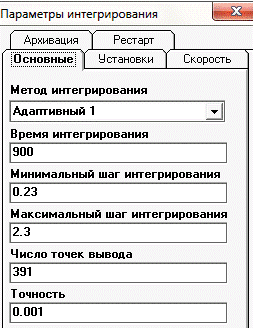
Параметры интегрирования.
Для получения данного графика необходимо подобрать и ввести параметры счета
- метод интегрирования «Адаптивный 1»
исходя из наименьшей постоянной времени T=23с, принимаем значение шага интегрирования:
- максимальный шаг равен 2,3
- минимальный 0,23 исходя из наибольшей постоянной времени To=230 с, принимаем первоначальное значение
- времени интегрирования 900с
- точность интегрирования 0,001
- число точек выдачи данных 391
Определив все показатели, заносим их в соответствующее окно «Параметры счета»
3.6 Графики переходных процессов неустойчивой и устойчивой САР
Графиком переходного процесса называется изображение переходной функции.
Подставив в каждое звено структурной схемы соответствующие коэффициенты и постоянные времени получаем график переходного процесса данной системы.
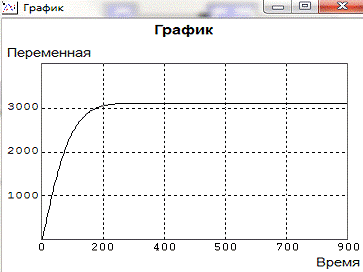
Рис. 5. График переходного процесса
3.7 Расчётные показатели качества САР
На рисунке 5 видно, что переходная функция — монотонная. При монотонных переходных функциях качество САР характеризуется статической ошибкой Δθст и временем регулирования tp .
Статическая ошибка определяется требуемой точностью к поддержанию регулируемой величины. Так, для САР температуры, подаваемой в зерносушилку погрешность стабилизации температуры должна быть не более 10 ºС.
Значение заданной величины Δ, определяющей длительность времени регулирования tp обычно принимают не больше 5% заданного значения регулируемой величины.
![]()
время регулирования: Тp ег =300
перерегулирование, определяемое разностью максимального значения регулируемой величины и её значения в установившемся режиме, %:
![]()
![]()
Коррекция САР
Если в результате моделирования установлено, что САР оказалась не устойчивой или её показатели качества не соответствуют заданным, то дальнейший процесс моделирования сводится к выбору корректирующих элементов.
Под коррекцией понимают изменение ее структурной схемы с целью обеспечения устойчивых с требуемыми показателями качества переходных процессов. Коррекция САР достигается посредством введения в систему дополнительных, корректирующих элементов, охватывающих один или несколько элементов исходной схемы.
Коррекцию САР на основе прямых связей принято называть последовательной, а с использованием обратных связей — параллельной.
4.1 Последовательная коррекция. Структурная схема САР. График переходного процесса скорректированной САР
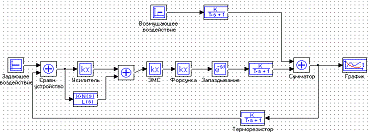
Рис. 6. Структурная схема с последовательной коррекцией
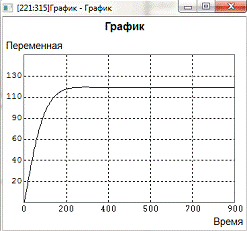
Рис. 7. Переходной процесс САР
4.2 Параллельная коррекция. Структурная схема САР. График переходного процесса скорректированной САР
Параллельная коррекция САР обеспечивается посредством обратных связей. Обратные связи могут быть положительными или отрицательными, жесткими или гибкими.
Структурная схема моделирования, охваченная обратной связью, представлена на рисунке 8.
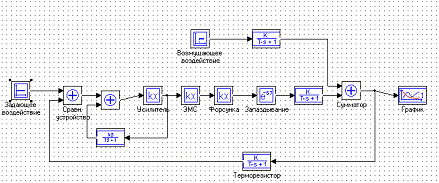
Рис. 8. Структурная схема САР с параллельной коррекцией
На рисунке 9 приведен график переходного процесса на котором видно, что предыдущая ошибка перерегулирования полностью устранена.

Рис. 9 график переходного процесса САР
5. Параметрическая оптимизация
Оптимальной системой называют автоматическую систему с наилучшими показателями качествами, по какому либо показателю. Применительно к САР система, оптимальна по быстродействию, осуществляет наиболее быстрый переход из одного установившегося состояния в другое; система, оптимальная по среднему квадратичному отклонению регулируемой величины от её заданного значения, обеспечивает наивысшую в определенных условиях точность регулирования.
5.1 Обоснование глобального параметра и локальных критериев качества
Для каждой конкретной оптимальной системы устанавливают определенный критерий оптимальности, под которым понимают некое число, зависящее от параметров системы или алгоритма ее функционирования.
Квадратичный интегральный показатель качества оценивает процесс по сумме площадей по графикам .
5.2 Структурная схема оптимизируемой САР
Оптимизируя структурную схему САР с параллельной коррекцией получаем:
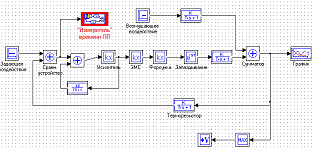
Рис. 10. Структурная схема САР
Далее открываем вкладку параметры оптимизации и вводим соответственно её параметры, критерии и метод.
5.3 Исходные данные для моделирования
Выбираем глобальный параметр ![]() . С учетом требований к показателям качества переходного процесса формируем локальные критерии оптимизации
. С учетом требований к показателям качества переходного процесса формируем локальные критерии оптимизации ![]() и
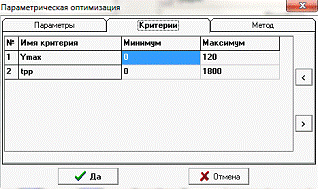
и ![]() . В диалоговом окне «критерии» устанавливаем соответственно максимальное значение выходной величины θ=200 С и время стабилизации процесса 700 с.
. В диалоговом окне «критерии» устанавливаем соответственно максимальное значение выходной величины θ=200 С и время стабилизации процесса 700 с.
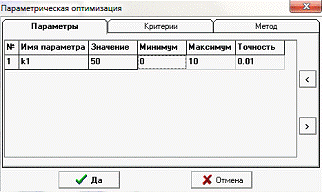
5.4 Диалоговые окна «Параметрическая оптимизация»
а) параметры
б) критерии
в) метод
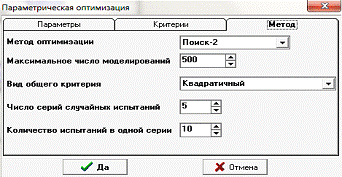
Рис. 11. Диалоговые окна параметров оптимизации
5.5 График переходного процесса с результатами оптимизации
Далее запускаем расчет оптимизации. После его окончания получаем таблицу с результатами (см. таблицу 2) и график переходного процесса (см. рисунок 12).
Таблица 2. Результаты оптимизации
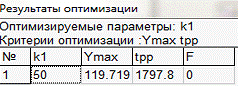
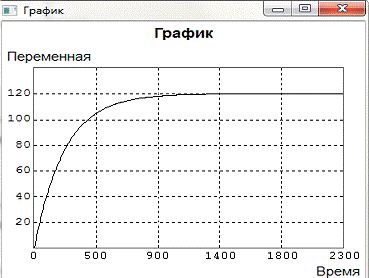
Рис. 12. График переходного процесса
6. Моделирование нелинейной САР
В САР пропорциональный электронный усилитель заменяем двухпозиционным релейным усилителем, статическая характеристика которого имеет вид, показанный на рис. 13.
Uy , B
220
0 b ΔU, B
Рис. 13. Статическая характеристика усилителя
6.1 Структурная схема моделирования САР

Рис. 14. САР с нелинейным элементом
6.2 Графики процесса регулирования
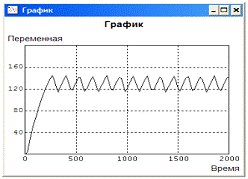
Рис. 15. График переходного процесса при b=2
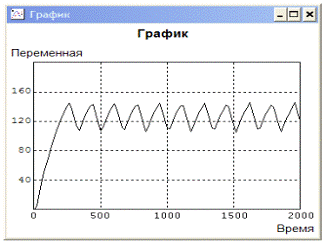
Рис. 16. График переходного процесса при b=8
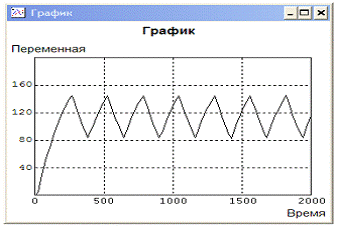
Рис. 17. График переходного процесса при b=32
Выводы и заключение
Опыт решения тестовых и прикладных задач, выполнения различных лабораторных работ показал, что ПК «МВТУ» является удобным, эффективным и надежным средством для исследования и проектирования сложных технических систем.
Выполнение данной курсовой работы помогло закрепить полученные ранее знания. Научились составлять функционально структурные схемы автоматического регулирования, получать графики переходных процессов системы и, анализируя их делать выводы о надежности и быстродействии системы автоматического управления. Проводить коррекцию и оптимизацию этих систем.
Список используемой литературы
[Электронный ресурс]//URL: https://drprom.ru/kursovaya/matematicheskoe-opisanie-lineynyih-sistem-avtomaticheskogo-regulirovaniya/
1. Карташов Б.А. // Практикум по автоматике. Математическое моделирование систем автоматического регулирования. // Колос // 2006 г.
. Попов Е.П. // Теория линейных систем автоматического регулирования и управления: Учебное пособие для втузов // Наука // 1988 г.
. Мартыненко И.И. // Автоматика и автоматизация производственных процессов // Колос // 1985