
1. Проектирование. Типовая логическая схема проектирования
1.1 Основные определения процесса проектирования
Проектирование, Алгоритм проектирования, Результат проектирования, Проектное решение, Типовое проектное решение, Цель процесса проектирования
Проектирование, по существу, представляет собой процесс управления с обратной связью. Техническое задание формирует входы , которые сравниваются с результатами проектирования, и если они не совпадают, цикл проектирования повторяется вновь до тех пор, пока отклонение от заданных технических требований не окажется в допустимых пределах.
Проектная процедура
проектной операцией
1.2 Системы проектирования
Процесс проектирования осуществляется системой проектирования, т.е. совокупностью взаимодействующих друг с другом проектировщиков и необходимых для проектирования технических средств.
Система – совокупность элементов, объединенных единством цели и иерархией взаимоотношений. Частью системы может быть элемент или другая система (подсистема).
В технике рассматриваются сложные технические системы (стс).
Понятие сложности определяется наличием подсистем (п/с) различной физической природы. Каждая подсистема может выполнять свою подцель, но в результате все они работают на единую цель всей системы.
По существу, системы проектирования могут рассматриваться как сложные человеко-машинные многоконтурные, многомерные системы управления с обратной связью, требующие сбора, передачи, переработки и использования информации для достижения цели проектирования. Они должны быть подчинены тому или иному критерию оптимизации, например, критерию наименьшей продолжительности или максимального быстродействия при ограниченных затратах, или критерию быстрейшей окупаемости спроектированной системы и т.д.
Вначале термин «автоматизация проектирования» применялся во всех тех случаях, когда ЭВМ использовали для расчетов, связанных с проектированием. Но сейчас этот термин приобрел более специфический смысл, относящийся к интерактивным системам, в которых проектировщик и ЭВМ при решении задач проектирования взаимодействуют друг с другом. При помощи автоматизации проектирования результаты проектирования объектов, в которых использовались новые идеи и технические средства, могут быстро сообщаться проектировщику в удобной для него форме. Благодаря этому за короткий промежуток времени можно глубоко проникнуть в суть проблем, связанных с проектированием. Автоматизация проектирования также позволяет создавать необходимую документацию и проверять полученные результаты. Таким образом, сегодня речь идет о создании, так называемых, интеллектуальных человеко-машинных систем, в рамках которых возможно выполнение всего цикла проектных работ, начиная от научных исследований и кончая изготовлением конструкторской и технологической документации, а в ряде случаев – макетов или опытных образцов. Причем, «интеллектуальность» таких систем определяется тем, в какой степени эта система способствует раскрытию и использованию интеллектуальных возможностей человека, его знаний и опыта как специалиста, освобождая его от механической и нетворческой работы.
Сущность процесса проектирования радиоэлектронных систем
... ситуация типична, например, для "простых" систем проектирования или управления, когда критерий, заданный в виде функционала, позволяет ... принципиального несоответствия традиционного подхода к проектированию и сложности современных радиоэлектронных средств. Указанное противоречие и ... прошедший всесторонние испытания в реальных условиях эксплуатации. Создание технической документации, на основе которой ...
Проектирование
неавтоматизированное проектирование и автоматизированное проектирование.
неавтоматизированным
автоматизированным
автоматического
автоматическим
1.3 Стадии и этапы проектирования
Согласно стандарту выделяют следующие стадии проектирования:
Предпроектное исследование, Разработка технического задания (ТЗ)., Разработка предложения технического, Эскизное проектирование (ЭП)., Техническое проектирование
Результат – полная конструкторская документация и, как правило, опытный образец.
Проектная организация может завершить работу на стадии ТП, передав документацию заказчику, который передает в производственные предприятия (размещает заказ), где тех. проект доводят до рабочего проекта (РП).
Рабочее проектирование
Этапом
1.4. Подходы к конструированию на основе компьютерных технологий.
Первый подход
оформление конструкторских документов
разработка текстовых документов
второго подхода
2.1 CAD/CAM системы
Системы Автоматизированного Проектирования
CAD – Computer Aided Design, или Computer Aided Drafting (проектирование и конструирование с помощью ЭВМ или черчение с помощью ЭВМ).
САПР конструктора.
CAM – Computer Aided Manufacturing. (автоматизированные системы технологической подготовки производства).
САПР технолога.
САЕ – Computer Aided Engineering (инженерные расчёты с помощью ЭВМ, исключая автоматизирование чертёжных работ).
Проведение всех необходимых расчетов в процессе анализа выполненной конструкции. Иногда этот термин использовался как понятие более высокого уровня – для обозначения всех видов деятельности, которую инженер может выполнять с помощью компьютера.
PDM – ProductDataManagement (управление проектными данными).
Предполагает полную информационную поддержку производства. Эксплуатация, рекламация, статистика поведения изделия (сопровождение изделия)
CAD/CAM/CAE/PDM.
Использование систем автоматизированного проектирования позволяет не только снизить трудоёмкость, временные и денежные затраты, но освободить человека от большого количества однообразной работы, например, от оформления большей части документопотока.
CAD/CAM-системы находят применение в широком диапазоне инженерной деятельности, начиная с решения сравнительно простых задач проектирования и изготовления конструкторско-технологической документации и, кончая, задачами объёмного геометрического моделирования, ведением проекта, управления распределенным процессом проектирования и т.п.
Проектирование и анализ веб-интерфейсов
... системы: отсутствие навигации, ссылки на все курсы представлены на стартовой странице, хаотичное расположение тем. Рисунок 4 – Страница сайта «Академии Хана» На основании приведенного анализа, ... требует значительных затрат времени, то дальнейшая работа представляет собой приблизительный вариант реализации искомого веб-ресурса. 1.2 Анализ контекста использования и конкурентов Для понимания ...
2.2 Комплексные автоматизированные системы
АСП – Автоматизированная Система Планирования – здесь выполняется планирование выпуска изделий
АСНИ – Автоматизированная Система Научных Исследований – здесь выполняется исследовательская часть конструкторских и технологических работ с использованием ЭВМ. Разработка, исследование новых принципов работы изделий, поиск и анализ мировых аналогов. Основные виды работ: математическое моделирование, натурные исследования, (например, создание электромобиля – проводится анализ электродвигателя).
САПР (CAD) – Система Автоматизированного Проектирования – совокупность увязанных друг с другом моделей проектных процедур, образующих логическую схему построения объекта (проекта) на основе математических методов, информационных данных и средств ВТ.
АСТПП (CAM) – Автоматизированная Система Технологической Подготовки Производства – заключается в разработке технологии: выбор заготовки, определение технологических переходов (операций), выбор оборудования, инструмента, оснастки, вплоть до управляющих программ для станков с ЧПУ.
Ввиду большой связанности процесса САПР и АСТПП многие современные системы автоматизации охватывают весь процесс, такие системы называются CAD/CAM системы (Unigraphics)
АСУП (PDM) – Автоматизированная Система Управления Предприятием – необходима для автоматизации организационного управления на предприятии. Анализ деятельности предприятия, планирование, диспетчирование, учет, контроль. Автоматизация работ управленческого персонала. Управление финансами; управление запасами (складским хозяйством); управление снабжением (статистика закупок, контракты на закупку); маркетинг (статистика и анализ реализации, контракты на реализацию, прогноз, реклама).
АСУ ТП – Автоматизированная Система Управления Технологическим Процессом .
На уровне управления технологическим оборудованием в АСУТП выполняются запуск, тестирование, выключение станков, сигнализация о неисправностях, выработка управляющих воздействий для рабочих органов программно управляемого оборудования. Для этого в составе технологического оборудования используются системы управления на базе встроенных контроллеров.
3.1 Концепция формирования САПР, как инструмента для разработки объекта
Согласно определению, рекомендуемому ГОСТом, САПР- это комплекс программно-технических средств автоматизированного проектирования, взаимосвязанных с необходимыми подразделениями проектной организации или коллективом специалистов, выполняющих проектирование.
Т.о., САПР – система, объединяющая технические средства, математическое и программное обеспечение, параметры и характеристики которых выбирают с максимальным учетом особенностей задач инженерного проектирования и конструирования.
Целью создания САПР некоторого класса изделий является обеспечение полноты всех функций по проектированию, необходимых пользователю для получения проекта.
«Проектирование автоматизированных систем» : «Проектирование ...
... — две. Основными факторами, определяющими работу ректификационных колонн, являются: давление, температура, число тарелок, кратность орошения, или флегмовое число. Назначение технологического процесса Газофракционирующая установка (ГФУ-300) предназначена для ...
Конкретная САПР предназначена для решения задач в определенной предметной области (например, САПР печатных плат).
При разработке САПР выполняются следующие процедуры:
1. Проводится поиск в БД конструкторской документации известных проектных решений, аналогов изделия (проекта);
2. При необходимости проводится создание новой конструкции изделия (инженерный синтез);
3. Проводится анализ разработки на соответствие заданным требованиям (инженерный анализ);
4. Формируется конструкторская документация.
Общая схема:
Поиск ![]() синтез
синтез![]() анализ
анализ![]() выпуск проектной документации
выпуск проектной документации
Синтез и анализ могут повторяться.
3.2 Разновидности САПР
Классификацию САПР осуществляют по ряду признаков.
– По приложениям наиболее представительными и широко используемыми являются следующие группы САПР.
1. САПР для применения в отраслях общего машиностроения (машиностроительные САПР).
2. САПР для радиоэлектроники (ElectronicCAD) системы.
3. САПР в области архитектуры и строительства.
Кроме того, известно большое число более специализированных САПР, или выделяемых в указанных группах, или представляющих самостоятельную ветвь в классификации. Например, САПР больших интегральных схем, САПР летательных аппаратов, САПР электрических машин, и т.д.
- По целевому назначению различают САПР (или подсистемы САПР), обеспечивающие разные аспекты проектирования. Так, в составе машиностроительных САПР появляются CAE/CAD/CAM системы:
1. конструкторские САПР общего машиностроения, часто называемые просто CAD (Computer Aided Design) – системами (проектирование и конструирование).
2. технологические САПР общего машиностроения, иначе называемые автоматизированными системами технологической подготовки производства или системами CAM (ComputerAidedManufacturing).
3. САПР функционального проектирования, или CAE(ComputerAidedEngineering) системы (инженерные расчеты).
Проведение всех необходимых расчетов в процессе анализа выполненной конструкции.
4. САПР информационной поддержки производства PDM (ProductDataManagement) системы (управление проектными данными).
отдельные
- По характеру базовой подсистемы – ядра САПР:
САПР на базе подсистемы машинной графики и геометрического моделирования
САПР на базе СУБД
САПР на базе конкретного прикладного пакета, Комплексные (интегрированные) САПР
Системы Автоматизированного Проектирования (САПР) – совокупность методов автоматизированного проектирования, средств их реализации (программных, технических, информационных и др.), а также специалистов, ими владеющих.
Как и любая сложная система, САПР состоит из подсистем.
Структурными составляющими САПР являются подсистемы, обладающие всеми свойствами системы и создаваемые как самостоятельные системы. Это выделенные по некоторым признакам части САПР, обеспечивающие выполнение некоторых законченных проектных задач с получением соответствующих проектных решений и проектных документов.
Понятие системы автоматизированного землеустроительного проектирования, ...
... 1. ТЕОРЕТИЧЕСКИЕ ПОЛОЖЕНИЯ АВТОМАТИЗИРОВАННЫХ СИСТЕМ ПРОЕКТИРОВАНИЯ В ЗЕМЛЕУСТРОЙСТВЕ Система автоматизированного проектирования (САПР) -- это организационно-техническая система, состоящая из совокупности комплекса средств автоматизации проектирования и коллектива специалистов подразделений проектной организации, выполняющая автоматизированное проектирование объекта, которое является результатом ...
функциональные
Функциональные, Обеспечивающие
Типичными обеспечивающими подсистемами являются подсистемы управления проектными данными, управления процессом проектирования, пользовательского интерфейса для связи разработчиков с ЭВМ, CASE (Computer Aided SoftwareEngineering) для разработки и сопровождения программного обеспечения САПР, обучающие подсистемы для освоения пользователями технологий, реализованных в САПР.
4.1 Функциональные подсистемы
Функциональные подсистемы выполняют проектные процедуры и операции, используя при этом, в общем случае, все средства обеспечивающих подсистем.
четыре основных вида
поиск аналогов
инженерный синтез
инженерный анализ
4. ФП4 – формирование и ведение проектной документации
ФП1 – поиск аналогов разрабатываемого изделия. Аналог нового изделия – это такое известное изделие, которое отвечает большинству заданных характеристик.
Работа в ФП1 заключается в анализе существующих технических решений, находящихся в базах данных (желательно мирового уровня).
ФП2 и ФП3 – это подсистемы, обеспечивающие поиск и генерацию вариантов технического решения и определения характеристик объекта (качественных показателей).
Осуществляется моделирование структуры и поведения объекта, а также оптимизация характеристик объекта. Ведется выполнение всех вычислительных процедур и процедур текущего отображения.
ФП4 – формирование и ведение проектной документации . Эта подсистема в соответствии с существующими ГОСТами и другими нормативами формирует всю необходимую проектную документацию. Ведение документации предполагает классифицированное хранение всей документации для выдачи копий, а также для возможности небольших коррекций.
5. объектно-ориентированные (объектные);
6. объектно-независимые (инвариантные).
К объектным подсистемам относят подсистемы, выполняющие одну или несколько проектных процедур или операций, непосредственно зависимых от конкретного объекта проектирования. Например, подсистема проектирования технологических систем; подсистема моделирования динамики, проектируемой конструкции и др.
К инвариантным подсистемам относят подсистемы, выполняющие унифицированные проектные процедуры и операции. Например, подсистема расчетов деталей машин; подсистема расчетов режимов резания; подсистема расчета технико-экономических показателей и др.
Процесс проектирования реализуется в функциональных подсистемах в виде определенной последовательности проектных процедур и операций.
4.2 Обеспечение САПР – виды, назначение
Структурное единство подсистем САПР обеспечивается строгой регламентацией связей между различными видами обеспечения, объединенных общей для данной подсистемы целевой функцией.
Согласно видам обеспечения выделяют соответствующие обеспечивающие подсистемы (ОП).
Решение задач с использованием системы MathCAD и Scilab
... системы. В данной курсовой работе требуется проанализировать как влияет изменение параметров на электрическую цепь второго порядка используя системы компьютерной математики(СКМ) - MathCad и Scilab , которые являются отличным примером системы ... ними, отображающих важнейшие для проектирования свойства технического объекта (ТО). Выполнение проектных операций и процедур в САПР основано на оперировании ...
Принято выделять 7 видов обеспечения:
- математическое;
- программное;
- информационное;
- лингвистическое;
- техническое;
- инструктивно-методическое;
- организационно-технологическое;
Математическое обеспечение, Лингвистическое обеспечение
Программное обеспечение
Информационное обеспечение, Техническое обеспечение
Инструктивно-методическое обеспечение
Организационно – технологическое обеспечение
Функционирование САПР возможно только при наличии и взаимодействии всех перечисленных обеспечивающих подсистем.
5.1 Состав и функции МО САПР
Математическое обеспечение (МО) включает в себя математические модели (ММ), методы и алгоритмы, необходимые для выполнения автоматизированного проектирования.
Математическое обеспечение САПР реализуется в виде программ и сопровождающей документации. На основе математического обеспечения решаются все задачи в САПР: постановка проблемы, организация вычислительного процесса и диалога человек – ЭВМ, анализ, синтез, техническое проектирование и т.д. Математическое обеспечение САПР делят на две основные составляющие: обслуживающую (общую) и проектирующую (специальную).
Обслуживающая составляющая математического обеспечения САПР содержит средства:
- o описания графических образов, накопления библиотек типовых изображений, редактирования, преобразования, называемые математическими средствами машинной графики;
- o обработки информационных массивов – методы сортировки, поиска элементов, преобразования структур и поиска данных;
- o обеспечения вычислительного процесса САПР;
- o сбора статистики параметров получаемых решений.
Количество частей обслуживающей составляющей математического обеспечения САПР увеличивается вместе с прогрессом теории и практики САПР.
Проектирующая или специальная составляющая математического обеспечения САПР содержит средства решения прикладных задач, на которые ориентирована САПР. Решение прикладных задач основывается на математическом моделировании объектов проектирования.
5.2 Общая модель объекта проектирования
моделирование
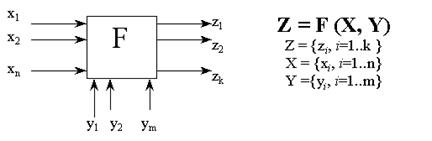
Модель – это система математических зависимостей, алгоритм или программа имитирующие структуру или функции исследуемого объекта. Модель в процессе изучения замещает объект оригинал, сохраняя его наиболее важные черты. Моделирование – представление различных характеристик поведения физической или абстрактной системы с помощью другой системы.
декомпозиции
i
F – оператор (модель) преобразования (F – функция от входных переменных);
i
i
i
i
Математическое обеспечение САПР включает в себя математические модели и методики построения математических объектов проектирования и алгоритмов их решения. Методы МО используются для формализованного представления объекта проектирования в виде математических моделей, а методики и алгоритмы – при реализации конкретных алгоритмов решения задач проектирования с использованием математических моделей.
В дальнейшем по мере развития системы САПР математическое обеспечение будет пополняться новыми, необходимыми для описания процесса и объектов проектирования методами, методиками и алгоритмами.
5.3 Задачи анализа, оптимизации и синтеза
Известны три основных постановки задачи проектирования:
В первом случае
Во втором случае
j
j
j
Каждая модель оценивается некоторой совокупностью критериев качества (их число обозначено через p ). Критерии качества дают численное представление о степени соответствия изделия его назначению.
В выражение (5.3.1.) помимо упомянутых критериев качества могут входить функциональные ограничения, характеризующие просто зону работоспособности модели (изделия).
Например, по выходным параметрам:
i
где l – число выходных параметров, на диапазон возможных изменений которых наложены ограничения.
оптимального проектирования
В третьем случае
Синтез технических объектов нацелен на создание новых вариантов конструкций изделий, а анализ на оценку этих вариантов. Синтез и анализ выступают в процессе проектирования в единстве, итерационной последовательности. При синтезе заранее заданны: допустимый набор используемых элементов, накапливаемых в БД, либо стандартные детали механических конструкций. Различают структурный синтез, т.е. поиск оптимальной или рациональной структуры (схемы) технического объекта, говорят в рамках выбранного принципа действия. Например это задача размещения микросхем на печатной плате. Параметрический синтез – определение наилучших динамических параметров при выбранной структуре.
5.4 Задачи структурного и параметрического синтеза
Общая постановка задачи структурного и параметрического синтеза.
Результирующее проектное решение (при конструкторском проектировании) ищется на множестве структур А, которые способен создать проектировщик, а также на множестве варьируемых параметров Y. Здесь А и Y образуют множество альтернатив, на которых ищутся решения. Тогда общая форма задачи синтеза ставится так:
![]()
Поиск при заданных ограничениях
![]()
для достижения экстремума функции.
Таким образом, техническое решение представляет собой некоторую структуру и, найденную на множестве структур и параметров, отвечающих ограничениям в среде функционирования Х.
Процедуры структурного и параметрического синтеза.
Процедуры синтеза выполняются на основе математической модели, являющийся математическим аналогом проектируемого объекта. Степень адекватности (соответствия) модели реальному (будущему) объекту определяется начальной постановкой. Процедуры синтеза и анализа итерационны и образуют два вложенных цикла:
- внешний – структурный цикл;
- внутренний – параметрический цикл.
Vп, Vс – вариация пар (структур).
Процедура выбора заключается в выборе некоторых данных для отобранной структуры, на основе чего и строится математическая модель. Основными показателями при реализации цикла является показатель модели, т.е. время реализации одного модельного эксперимента по расчету критериальных показателей при заданном векторе варьируемых параметров. Это модельное время.
Используются различные методы для варьирования значений параметров, в том числе:
∆y i
б) метод случайного поиска.
Внешний цикл – это перебор структур, часто он делается вручную.
Точка 1 – выход – найдено проектное решение.
существует 2 альтернативы принятия решения:
1 альтернатива
2 альтернатива
Если альтернатива 1 – это уступка нам со стороны смежных проектировщиков, то 2 – это уступка заказчика.
5.5 Задачи оптимизации
Задача повышения эффективности технологических и организационных систем (например: металлорежущего станка, автоматической линии, производства в целом) путём принятия обоснованных решений актуальна во всех областях деятельности человека. Количественная оценка эффективности может быть получена при заданной цели функционирования системы, с учётом ограничений на ресурсы, привлекаемые для достижения цели. При этом задача принятия решения ставится как задача выбора параметров системы, обеспечивающих максимизацию или минимизацию целевой функции. Последняя количественно определяет степень достижения цели – величину критерия оптимизации. В качестве критерия можно принять, например, себестоимость изделия (цель-минимизация), быстродействие машины или прибора (цель-максимизация) и другие показатели.
В процессе оптимизации, с учетом заданных условий, отыскиваются элементы решения, т.е. те параметры системы и показатели качества, которые зависят от выбора и приводят к отыскиванию оптимальных конструкций, технологических схем и др.
Всякая оптимизационная задача предполагает заданной целевую функцию – количественный показатель качества альтернатив выбора. Обычно в задачах оптимизации отыскивается экстремум интегрального показателя, который представляется одной функцией f (X) нескольких переменных, заданной в некоторой области допустимых значений переменных.
глобальными экстремумами
Обоснованное применение количественных методов для принятия решений – оптимизацию поведения структур систем называют исследованием операций (ИСО).
Здесь операция – комплекс целенаправленных действий.
математическим программированием
В зависимости от характера целевой функции, а также ограничений могут использоваться различные методы оптимизации (математического программирования): линейное программирование, нелинейное программирование (хотя бы одна из функций нелинейна по X), целочисленное линейное программирование, динамическое программированиеи др.
5.6 Задачи линейного программирования
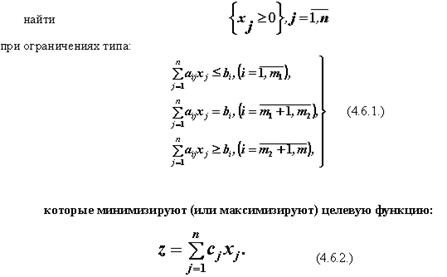
Одним из разделов математического программирования является линейное программирование. В моделях линейного программирования так называемая «основная задача» состоит в нахождении неотрицательного решения системы линейных уравнений или неравенств (ограничений), которое минимизирует или максимизирует линейную форму (целевую функцию).
Математическая задача линейного программирования записывается в сокращённом виде следующим образом:
Геометрическая интерпретация задачи ЛП
Задача линейного программирования геометрически может быть проиллюстрирована следующим образом.
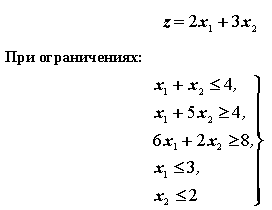
Пусть необходимо найти минимум целевой функции:
x1
Поэтому множество точек, являющихся возможными (допустимыми) решениями, может находиться в первом квадранте (см. рис. 4.6.1.).
Неравенства–ограничения изображены в виде полуплоскостей, границами которых являются прямые (графики функций), полученные из неравенств путём отбрасывания знаков > ,< . Полуплоскости образуют выпуклый многоугольник (многоугольник решений – симплекс).
Линейная форма (линия уровня) для некоторого набора фиксированных значений переменной z представляет собой семейство параллельных прямых. Одна из них, которая пройдёт через вершину многоугольника «М», ближайшую к началу координат и даст минимум z (для координат вершины).
Графический способ решения (перемещение графика целевой функции по симплексу) приемлем только для двухмерных задач (задач на плоскости).
Но геометрическое толкование задачи линейного программирования справедливо и для общего случая (m ограничений и n переменных).
Каждое из соответствующих неравенству уравнений системы определяет некоторую гиперплоскость в n – мерном пространстве. Множество неотрицательных решений образует выпуклый многогранник в n – мерном пространстве. Линейная форма z -гиперплоскость, перемещая которую параллельно самой себе, будем получать множество точек пересечения её с выпуклым многогранником. Максимальное или минимальное значение линейной формы z достигается в точках, являющихся вершинами выпуклого многогранника.
симплекс метод
Для решения задачи линейного программирования симплекс-методом применяется специальный аппарат формальных преобразований математической модели. Рассмотрим некоторые его положения. Пусть задана основная задача линейного программирования (см. (4.6.1.) и (4.6.2)).
Введя в левую часть каждого неравенства добавочную переменную, преобразуем его в уравнение и перейдём к другой, стандартной форме записи:
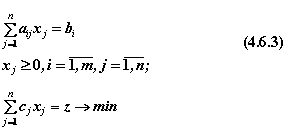
bi
Систему (4.6.3) после несложных преобразований можно привести к виду:
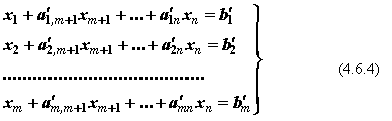
bi
Пусть m < n. Разделим все переменные системы (4.6.4) на две части:
- а) основные переменные, количество которых должно быть равно количеству линейно-независимых переменных (m);
- б) неосновные переменные, количество которых будет равно n – m.
x1 , x2 , …, xm
Придавая неосновным (независимым) переменным произвольные числовые значения, получим некоторое решение данной системы, причём каждому набору значений независимых переменных будет соответствовать одно определённое решение системы.
Основные (зависимые, несвободные) переменные будем называть базисными, неосновные (независимые, свободные) – небазисными переменными.
Можно составить бесчисленное множество различных наборов значений независимых переменных. Из всех этих решений в линейном программировании нас будет интересовать так называемые допустимые базисные решения.
Допустимое базисное решение системы линейных уравнений при m < n – это такое решение, в котором неосновным (независимым, небазисным) переменным даны нулевые значения, а значения базисных переменных являются неотрицательными (решение на грани или вершине симплекса ).
В теории линейного программирования доказывается, что если оптимальное решение задачи существует, то оно совпадает по крайней мере с одним из допустимых базисных решений.
Поиск и направленные переходы от одних допустимых базисных решений к другим с целью определения оптимального решения может быть выполнен численным методом. Один из них рассмотрим ниже.
Рассмотрим вычислительные и логические процедуры, обеспечивающие поиск решения задачи линейного программирования симплекс-методом. Процедуры поясняются в процессе решения конкретной задачи: найти совокупность значений, удовлетворяющих системе неравенств:
Таким образом, идея симплекс-метода преобразования модели заключается в таком интерактивном направленном переходе от одного допустимого базисного решения к другому, при котором последовательно улучшается значение линейной формы.
Симплекс-метод является наиболее распространенным универсальным методом. Существует несколько вариантов этого метода, рассмотрим один из них.
Необходимо предварительно выполнить следующие этапы:
- привести математическую модель к каноническому виду;
- определить начальное допустимое базисное решение задачи;
Пример:
L=3x 1 +2x2 ®max
x 1 -x2 £2,
2x 1 +x2 £6,
x 1 , x2 ³0
Приведем заданную модель к каноническому виду, введя свободные переменные x 3 и x4 , превращающие неравенства в равенства. Переменные x3 и x4 входят в уравнение с коэффициентом единица и только один раз:
L=3x 1 +2x2 ®max
x 1 -x2 +x3 =2,
2x 1 +x2 +x4 =6,
x j ³0
где x 3 , x4 — дополнительные переменные, x1 , x2 — свободные переменные, A3, A4 — начальный базис, A0 -вектор ограничений.
Составим симплекс – таблицу, соответствующую каноническому виду:
| Табл . 0 | 0 | 3 | 2 | 0 | 0 | q | ||
| i | Csi | базис | A0 | A1 | A2 | A3 | A4 | |
| 1 | 0 | A3 | 2 | 1 | -1 | 1 | 0 | 2Ümin |
| 2 | 0 | A4 | 6 | 2 | 1 | 0 | 1 | 3 |
| D | 0 | -3 | -2 | 0 | 0 | |||
| Z | 0 | 0 | 0 | 0 | 0 | |||
| Ýmin | ||||||||
Элементы строки D рассчитываем по формулам:
![]()
![]()
![]()
![]()
Для базисных переменных оценки всегда равны нулю.
Значение критерия для данного начального базиса будет равно нулю:
L=åc i ai 0 =0*2+0*6=0;
Так как имеются D j <0 приступаем к улучшению плана.
Первая итерация
В базис вводим вектор A 1 , которому соответствует минимальное значение Dj . Из базиса выводим вектор A3 , так как минимальное q достигается при i=3.
Таким образом, элемент a 31 будет направляющим (в таблице выделен зеленым цветом).
Заполняем таблицу, соответствующую новому базисному решению.
Все элементы a ij таблицы определяются по следущему рекуррентному соотношению:
где a kr — направляющий элемент, l– номер итерации
| Табл . 1 | 0 | 3 | 2 | 0 | 0 | q | ||
| i | Csi | базис | A0 | A1 | A2 | A3 | A4 | |
| 1 | 3 | A1 | 2 | 1 | -1 | 1 | 0 | – |
| 2 | 0 | A4 | 2 | 0 | 3 | -2 | 1 | 2/3Ümin |
| D | 6 | 0 | -5 | 3 | 0 | |||
| Z | 6 | 3 | -3 | 3 | 0 | |||
| Ýmin | ||||||||
Приведем расчет нескольких элементов таблицы:
![]()
![]()
Элемент a 42 =3 является направляющим (в таблице выделен зеленым цветом).
Так как в строке оценок полученного нового плана имеется отрицательное значение D j , приступаем ко второй итерации, продолжая улучшать план.
Вторая итерация
| Табл. 2 | 0 | 3 | 2 | 0 | 0 | q | ||
| i | Csi | базис | A0 | A1 | A2 | A3 | A4 | |
| 1 | 3 | A1 | 8/3 | 1 | 0 | 1/3 | 1/3 | 8 |
| 2 | 2 | A2 | 2/3 | 0 | 1 | -2/3 | 1/3 | – |
| D | 28/3 | 0 | 0 | -1/3 | 5/3 | |||
| Z | 28/3 | 3 | 2 | -1/3 | 5/3 | |||
| Ýmin | ||||||||
Элемент a 13 =1/3 является направляющим (в таблице выделен зеленым цветом).
Третья итерация
| Табл. 3 | 0 | 3 | 2 | 0 | 0 | ||
| i | Csi | базис | A0 | A1 | A2 | A3 | A4 |
| 1 | 0 | A3 | 8 | 3 | 0 | 1 | 1 |
| 2 | 2 | A4 | 6 | 2 | 1 | 0 | 1 |
| D | 12 | 1 | 0 | 0 | 2 | ||
| Z | 12 | 4 | 2 | 0 | 2 | ||
Поскольку все D j ³0, то план представленный в данной таблице будет оптимальным.
Ответ: x1 =0; x2 =6; x3 =8; x4 =0; L=12;
- Если в системе ограничений имеются неравенствами вида > и / или =, начальный план не может быть найден так же просто, как в рассмотренном примере. В таких случаях начальный план отыскивают с помощью искусственных переменных.
Пример: Найти максимум функции
L=2x 1 +3x2 -5x3 ;
при ограничениях:
2x 1 +x2 -x3 ³7,
x 1 +2x2 +x3 ³6,
x 1 +4x2 =8,
x j ³0
Вводим в систему три искусственные переменные: x 6 , x7, x8 , позволяющие получить начальный базис.
Для исключения из базиса этих переменных последние вводятся в целевую функцию с большим отрицательным коэффициентом М (в задаче минимизации – с положительным М)
L¢=L-M*x 6 -M*x7 -M*x8 ®max
при ограничениях
2x 1 +x2 -x3 -x4 +x6 =7,
x 1 +2x2 +x3 -x5 +x7 =6,
x 1 +4x2 +x8 =8,
x j ³0
Выбрав в качестве начального базиса векторы A 6, A7 , A8 , решаем полученную задачу с помощью табличного симплекс-метода.
Если в оптимальном решении такой задачи нет искусственных переменных, это и есть оптимальное решение исходной задачи.
Если же в оптимальном решении данной задачи хоть одна из искусственных переменных будет отлична от нуля, то система ограничений исходной задачи несовместна и исходная задача не разрешима.
| Табл 0 | 0 | 2 | 3 | -5 | 0 | 0 | — M | — M | — M | q | |
| Csi | базис | A0 | A1 | A2 | A3 | A4 | A5 | A6 | A7 | A8 | |
| -M | A6 | 7 | 2 | 1 | -1 | -1 | 0 | 1 | 0 | 0 | 7 |
| -M | A7 | 6 | 1 | 2 | 1 | 0 | -1 | 0 | 1 | 0 | 3 |
| -M | A8 | 8 | 1 | 4 | 0 | 0 | 0 | 0 | 0 | 1 | 2Ümin |
| D | -21M |
-4M -2 |
-7M -3 |
5 | M | M | 0 | 0 | 0 | ||
| Ýmin |
Элемент a 82 =4 является направляющим (в таблице выделен зеленым цветом).
Столбцы, соответствующие искусственным переменным по мере вывода из базиса из расчета исключаются.
| Табл 1 | 0 | 2 | 3 | -5 | 0 | 0 | — M | — M | q | |
| Csi | базис | A0 | A1 | A2 | A3 | A4 | A5 | A6 | A7 | |
| -M | A6 | 5 | 7/4 | 0 | -1 | -1 | 0 | 1 | 0 | 20/7Ümin |
| -M | A7 | 2 | 1/2 | 0 | 1 | 0 | -1 | 0 | 1 | 4 |
| 3 | A2 | 2 | 1/4 | 1 | 0 | 0 | 0 | 0 | 0 | 8 |
| D |
-7M+6 |
-9М/4–3/4 | 0 | M+5 | M | M | 0 | 0 | ||
| Ýmin |
Элемент a 61 =7/4 является направляющим (в таблице выделен зеленым цветом).
| Табл 2 | 0 | 2 | 3 | -5 | 0 | 0 | — M | q | |
| Csi | базис | A0 | A1 | A2 | A3 | A4 | A5 | A6 | |
| 2 | A1 | 20/ 7 | 1 | 0 | -4/ 7 | -4/ 7 | 0 | 0 | – |
| -M | A7 | 4/ 7 | 0 | 0 | 9/ 7 | 2/ 7 | -1 | 1 | 4/9Ümin |
| 3 | A2 | 9/ 7 | 0 | 1 | 1/ 7 | 1/ 7 | 0 | 0 | 9 |
| D |
-4M/ 7 +67/ 7 |
0 | 0 |
-9M/ 7 +30/ 7 |
2M/ 7 -5/ 7 |
M | 0 | ||
| Ýmin |
Направляющий элемент a 73 =9/ 7 (в таблице выделен зеленым цветом).
| Табл 3 | 0 | 2 | 3 | -5 | 0 | 0 | |
| Csi | базис | A0 | A1 | A2 | A3 | A4 | A5 |
| 2 | A1 | 28/9 | 1 | 0 | 0 | 0 | -4/9 |
| -5 | A3 | 4/9 | 0 | 0 | 1 | 2/9 | -7/9 |
| 3 | A2 | 11/9 | 0 | 1 | 0 | -1/9 | 1/9 |
| D | 23/3 | 0 | 0 | 0 | 23/9 | 30/9 |
Найдено оптимальное решение, так как все оценки неотрицательные и в базисе нет искусственных переменных:
x 1 =28/9, x2 =11/9, x3 =4/9, x4 =0, L=23/3.
1. Разработка САПР. В 10 кн. Под ред. А.В. Петрова – М.: Высш. шк., 1990.
2. Системы автоматизированного проектирования: Учебн. пособие для ВУЗов: В 9 кн. / Под ред. И.П. Норенкова. – М.: Высш. шк., 1986. –159 с.
3. Основы построения систем автоматизированного проектирования / А.И. Петренко, О.И. Семенков. – 2-е изд., стер. – К.: Вища шк. Головное изд-во, 1985 – 294 с.
4. Справочник по САПР/ А.П. Будя, А.Е. Кононюк, К.П. Куценко и др.; Под ред. В.И. Скурихина. – К.: Техника, 1988. – 375 с.
5. Вермишев Ю.Х. Основы автоматизации проектирования. – М.: Радио и связь, 1988 – 288 с.
6. САПР изделий и технологических процессов в машиностроении / Р.А. Аллик, В.И. Бородянский, А.Г. Бурин и др. Под общ. ред. Р.А. Аллика. – Л.: Машиностроение, 1986. – 319 с.
7. Бойко В.В., Савинков В.М. Проектирование баз данных информационных систем. 2-е изд., перераб. и доп. – М.: Финансы и статистика, 1989. – 351 с.
8. Грувер М., Зиммерс Э. САПР и автоматизация производства: Пер. с англ. – М.: Мир, 1987. – 528 с.
9. Гардан И., Люка М. Машинная графика и автоматизация конструирования: Пер. с франц. – М.: Мир, 1987. – 272 с., ил.
10.Корячко В.П. и др. Теоретические основы САПР: Учебник для ВУЗов. – М.: Энергоатомиздат, 1987. – 400 с., ил.
11.Робототехника и гибкие автоматизированные производства. В 9 кн. Учебное пособие для ВУЗов / Ю.М. Соломинцев и др. Под ред. И.М. Макарова. – М.: Высш. шк., 1986.
12.Хирн Д., Бейкер М. Микропроцессорная графика: Пер. с англ. – М.: Мир, 1987. – 352 с.