
Термин «автоматическое управление» означает процесс управления техническим объектом без вмешательства человека. При этом объект управления должен быть способен воспринимать управляющие воздействия – сигналы, содержащие информацию о том, что должно в них произойти. В большинстве случаев эти сигналы генерируются специальным управляющим устройством на основе информации о текущем состоянии объекта и его окружении. Таким образом, предметом автоматического управления, как раздела технической кибернетики, являются информационные связи и потоки в системе, образуемой объектом управления и управляющим им устройством, безотносительно к их физической природе и конкретному техническому исполнению.
Тот же принцип управления используется в следящих системах.
Следящая система управления — вид системы автоматического управления, в которой заранее неизвестен вид управляющего воздействия. Обычно следящие системы предназначены для воспроизведения на выходе изменения управляющего воздействия, слежения за ним. Они представляют собой особый класс систем автоматического управления, в которых изменения происходят по любому закону. Входной сигнал непрерывно обрабатывается системой, при этом заданное входное воздействие, обрабатываемое системой, изменяется произвольно в широких пределах.
В системах автоматического управления, которые состоят только из основных функционально необходимых элементов, служащих для реализации того или иного принципа регулирования, хотя и уменьшаются ошибки по сравнению с системами без регулятора, обычно не удаётся получить требуемых показателей качества. Для улучшения показателей качества вводят в системы автоматического управления корректирующие цепи. Одна из таких цепей дифференцирующая фазоопережающая.
1 Общая часть
1.1 Описание системы и требования, предъявляемые к ней
 |
Схема дифференцирующей фазоопережающей цепи наиболее распространена и называется, также форсирующей цепи или цепью быстрого реагирования. Данная схема представлена на рисунке 1.
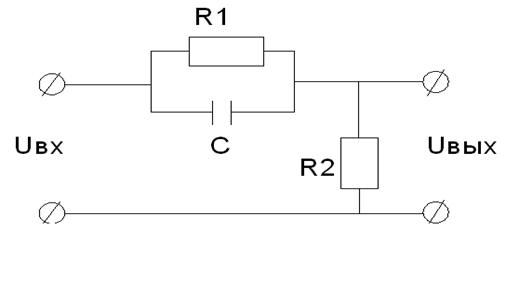
Рисунок 1
Передаточная функция этой цепи имеет вид:
![]() ;
;
где ![]() – коэффициент усиления цепи;
– коэффициент усиления цепи;
![]() и
и ![]() – постоянные времени цепи, характеризующие соответственно опережение и отставание (поскольку , то
– постоянные времени цепи, характеризующие соответственно опережение и отставание (поскольку , то ![]() )
)
 Следящая система состоит из объекта регулирования, автоматического регулятора (управляющее устройство), исполнительного механизма, преобразующего выходной сигнал регулятора в сигнал управления объектом, датчика и измерительного преобразователя. Функциональная схема следящей системы представлена на рисунке 2. Следящие системы, которые состоят только из основных функционально необходимых элементов, служащих для реализации того или иного принципа регулирования, хотя и уменьшаются ошибки по сравнению с системами без регулятора, обычно не удаётся получить требуемых показателей качества. Для улучшения показателей качества вводят в системы автоматического регулирования корректирующие цепи.
Следящая система состоит из объекта регулирования, автоматического регулятора (управляющее устройство), исполнительного механизма, преобразующего выходной сигнал регулятора в сигнал управления объектом, датчика и измерительного преобразователя. Функциональная схема следящей системы представлена на рисунке 2. Следящие системы, которые состоят только из основных функционально необходимых элементов, служащих для реализации того или иного принципа регулирования, хотя и уменьшаются ошибки по сравнению с системами без регулятора, обычно не удаётся получить требуемых показателей качества. Для улучшения показателей качества вводят в системы автоматического регулирования корректирующие цепи.
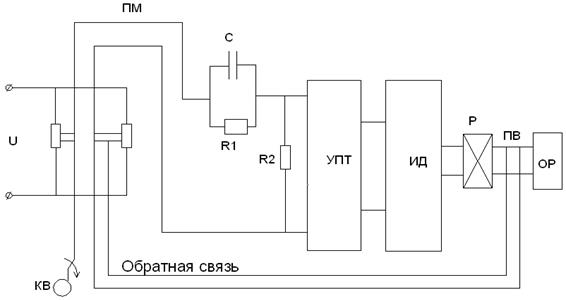
Рисунок 2
Рассмотрим пример следящей системы. В данной системе элементом сравнения служит потенциометрический мост ПМ, питаемый постоянным напряжением, а в качестве усилителя применен усилитель постоянного тока УПТ.
Требованиями для данной системы являются:
- запас устойчивости системы по фазе φ=40 0 ;
- достижение максимального значения коэффициента усиления, при котором обеспечивается заданная динамическая точность;
- выбор величины постоянной времени производной, позволяющей
 скомпенсировать влияние наиболее инерционного звена системы;
скомпенсировать влияние наиболее инерционного звена системы;
- выбор значения постоянной времени отставания так, чтобы вводимая цепь благодаря знаменателю передаточной функции вносила запаздывание в область более высоких частот;
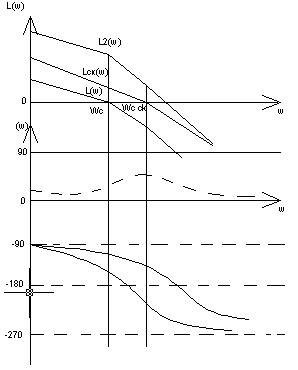
- логарифмическая амплитудно-частотная характеристика (ЛАЧХ)
Системы должна пересекать ось L(ω)=0Дб, при частоте, равной меньшей частоте сопряжения системы;
- достаточный запас устойчивости;
- уменьшение инертности системы;
- уменьшенная величина погрешностей.
Очень важными требованиями к данной системе являются обеспечение высокой надежности, как относительно сохранения параметров, так безаварийность и ремонтопригодность.
Стабильность позиционирования и обработки в значительной степени зависит от стабильности электромеханической системы приводов подач, которая определяется стабильностью её звеньев.
1.2 Выбор и обоснование методов расчета
Для определения устойчивости САР используют критерии устойчивости, т.е. с помощью них можно определить устойчива ли система или нет, не прибегнув к решению больших задач с использованием дифференциальных уравнений.
Для решения проблем корректирования следящей системы с помощью дифференцирующей фазоопережающей цепи можно пользоваться тремя методами:
- аналитический метод (критерий устойчивости Рауса-Гурвица).
На практике критерий Гурвица обычно применяют для проверки устойчивости систем невысокого порядка, так как при высоком порядке расчеты условия устойчивости становятся очень громоздкими. Данный метод позволяет судить об устойчивости замкнутой системы по положительным коэффициентам характеристического уравнения без громоздких решений. Необходимые и  достаточные уравнения устойчивости системы определяются соотношениями коэффициентов, зависящих от порядка системы;
достаточные уравнения устойчивости системы определяются соотношениями коэффициентов, зависящих от порядка системы;
- графо-аналитический метод (критерий устойчивости Михайлова).
Данный метод основан на связи характера переходных процессов систем с амплитудой и фазой вынужденных колебаний, устанавливающихся при синусоидальном воздействии. Анализ устойчивости сводится к построению комплексной частотной характеристики по характеристическому многочлену замкнутой системы. Формулировка данного метода: “Для устойчивости линейной системы необходимо и достаточно чтобы годограф при изменении частоты ω от 0 до ∞ начинался на вещественной оси в точке a 1 и проходил последовательно против часовой стрелки n -квадрантов комплексной плоскости, не обращаясь в 0 и стремясь к ∞ в n -квадранте, где n – порядок системы.” Критерий устойчивости Михайлова имеет недостаток, который заключается в том, что при увеличении порядка системы (например, начиная с 4-го) резко возрастает объем вычислений;
- графо-аналитический метод (критерий устойчивости Найквиста).
Критерий Найквиста позволяет судить об устойчивости по амплитудно-фазовым характеристикам разомкнутой системы. Этот метод применим для систем, устойчивых в разомкнутом состоянии. Формулировка: “Для устойчивости системы необходимо и достаточно, чтобы амплитудно-фазовая характеристика устойчивой разомкнутой системы при изменении частоты ω от 0 до ∞ не охватывала точку с координатами {-1 ; j 0 }.” Если нет местных обратных связей, то замкнутая система будет устойчивой при условии, что она состоит из устойчивых звеньев.
- критерий устойчивости Найквиста с использованием ЛЧХ.
Применение аналитического и графического критериев Найквиста на логарифмической плоскости приводят к более наглядной оценке устойчивости и запасов устойчивости по фазе и модулю. Формулировка: “Для устойчивости замкнутой системы необходимо и достаточно чтобы на всех частотах, где ЛАЧХ разомкнутой системы положительная (L(ω)>0), фазовый сдвиг не достигал значения -π(180°) или достигал его четное число раз. Замкнутая система будет  находиться на границе устойчивости, если на частоте ω c , ЛАЧХ разомкнутой системы обращается в 0 .”
находиться на границе устойчивости, если на частоте ω c , ЛАЧХ разомкнутой системы обращается в 0 .”
Для того чтобы скорректировать следящую систему целесообразно использовать графо-аналитический метод с использованием логарифмических частотных характеристик (ЛЧХ), так как при этом методе оптимизации следящей системы более хорошо видны погрешности характеристик ЛЧХ графиков и другие недостатки работы системы. При всем этом, проанализировав графики и изменяя отдельные характеристики системы, можно добиться совпадения текущих параметров с требуемыми.
2 Расчётная часть
2.1 Разработка структурной схемы
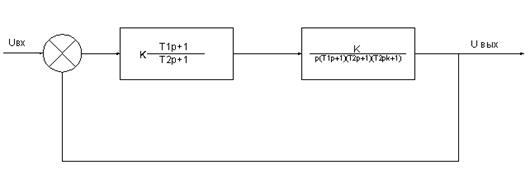
Для следящей системы необходимо высокое быстродействие и реагирование на изменяющиеся процессы в системе, увеличить коэффициент усиления системы k при сохранении достаточного запаса устойчивости по фазе, как об этом говорилось в разделе 1.3. И только при последовательном включении дифференцирующего фазоопережающего устройства с коэффициента усиления системы k при сохранении достаточного запаса устойчивости по фазе. Действительно, передаточная функция скорректированной системы при этом будет иметь вид:
![]() .
.
 2.2 Построение исходной и желаемой ЛЧХ
2.2 Построение исходной и желаемой ЛЧХ
Построение исходной ЛЧХ
Пусть передаточная функция нескорректированной следящей системы в разомкнутом состоянии
W р (P)=k/P(T1 P+1)( T2 P+1), (T1 > T2 ).
Подставляя вместо параметров их численные значения, получим
W р (P)=1/(0,1278Р3 +1,52Р2 +Р).
Перейдём теперь к частотной характеристике
W р (jω)=1/(-1,52ω2 +jω(1 — 0,1278ω2 ))
Или
W р (jω)= -1,52ω2 — jω(1 — 0,1278ω2 )/2,31ω4 +ω2 (1 — 0,1278ω2 )2 .
Запишем теперь выражение для амплитудно-частотной характеристики
А р (ω)= √(2,31ω4 +ω2 (1 — 0,1278ω2 )2 )/2,31ω4 +ω2 (1 — 0,1278ω2 )2 .
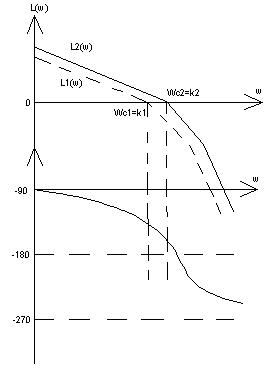
В логарифмическом масштабе амплитудно-частотная характеристика имеет вид
L p (ω)=20lg1-20lgω+20lg[2,31ω4 +ω2 (1-0,1278ω2 )2 ]-20lg[2,31ω4 +ω2 (1-0,1278ω2 )2 ].
При ω << 1, значение L p (ω)=0;
- При ω >>1, значение L p (ω) будет иметь следующий вид:
L p (ω)=20lg1-20lgω+20lg[2,31ω4 +ω2 (1-0,1278ω2 )2 ]-20lg[2,31ω4 +ω2 (1-0,1287ω2 )2 ].
Из данных значений составляем уравнение:
20lg1-20lgω+20lg[2,31ω 4 +ω2 (1-0,1278ω2 )2 ]-20lg[2,31ω4 +ω2 (1-0,1278ω2 )2 ]=0;
- Решаем и получаем ω =1c.
При подстановке в L p (ω)= 0.
Запишем фазовую частотную характеристику:
φ(ω)=arctg(ω 2 – 0,1278ω4 )/ 2,31ω4 ,
подставляя значение ω, получаем φ(ω)=-23 о.
 Коэффициент усиления k=ωс =1/Т1 =1/1,42= 0,70.
Коэффициент усиления k=ωс =1/Т1 =1/1,42= 0,70.
Запас устойчивости по фазе Δφ=180 о – 900 – arctg ωc T1 – arctg ωc T2 ,
при подстановке значений Δφ=36,6 о .
Запас устойчивости для того что бы система была устойчивой должен быть в пределах γ=30 о – 45о .
 |
Построение желаемой ЛЧХ
К следящей системе подсоединим последовательно дифференцирующее фазоопережающее звено с передаточной функцией
W k =kk (T1k P+1)/(T2k P+1).
После подсоединения корректирующего устройства, функция скорректированной системы принимает вид
W ск (P)=W(P)Wк (P)=kск (T1к P+1)/P(T1 P+1)(T2 P+1)(Т2к Р+1)
По условию Т 1 =Т1к , передаточная функция при этом
W ск (P)= kск /P(T2 P+1)(Т2к Р+1)
По условию Т 2 >Т2к , так что выбираем несколько меньший коэффициент, чем Т2 , Т2к =0,05c.
Дальше делаем аналогично по построению исходной ЛЧХ:
k ск = Wc = 1/0,09 = 11,1;
W ck (P)= 11,1/(0,0045P3 +0,14P2 +P);
W ck (jω)= 11,1(-0,14ω2 -jω(1-0,0045ω2 ))/0,0196ω4 +ω2 (1-0,0045ω2 ) 2 ;
A(ω)= 11,1√(0,0196ω 4 +ω2 (1-0,0045ω2 ) 2 )/ 0,0196ω4 +ω2 (1-0,0045ω2 ) 2 ;
L(ω)= 20lg11,1 – 20lgω+ 20 lg[0,0196ω 4 +
+ω 2 (1-0,0045ω2 ) 2 ]- 20lg[0,0196ω4 +ω2 (1-0,0045ω2 ) 2 ];
- При ω <<1, L(ω)=20lg11,1;
 При ω >>1, L(ω)= 20lg11,1 – 20lgω+ 20 lg[0,0196ω4 +ω2 (1-0,0045ω2 ) 2 ]- -20lg[0,0196ω4 +ω2 (1-0,0045ω2 ) 2 ];
При ω >>1, L(ω)= 20lg11,1 – 20lgω+ 20 lg[0,0196ω4 +ω2 (1-0,0045ω2 ) 2 ]- -20lg[0,0196ω4 +ω2 (1-0,0045ω2 ) 2 ];
20lg11,1 – 20lgω+ 20 lg[0,0196ω 4 +ω2 (1-0,0045ω2 ) 2 ]- 20lg[0,0196ω4
+ω 2 (1-0,0045ω2 ) 2 ] =20lg11,1;
- ω=0;
- Подставляя в формулы получаем L(ω)=20,9, φ(ω)=0.
2.3 Анализ характеристик. Вывод
Максимально возможное значение коэффициента усиления k ск, при котором запас устойчивости по фазе равен 30о -45о ,
k ск =1…2/ Т2 ,
то есть оно увеличилось по сравнению с коэффициентом усиления до включения корректирующего контура в
k ск /k≈T1 /T2 раз. Поскольку скоростная ошибка обратно пропорциональна коэффициенту усиления разомкнутой системы, то она с введением корректирующей цепи уменьшится в это же число раз.
Частота среза ω ск скорректированной системы увеличилась по сравнению с частотой среза ωс нескорректированной системы также в
ω ск/ ωс = T1 /T2
раз. Во столько же раз примерно уменьшится и время t p переходного процесса.
 Для того чтобы повысить коэффициент усиления системы до значения kск , необходимо увеличить коэффициенты усиления функционально необходимых эшлементов либо включить дополнительные усилители.
Для того чтобы повысить коэффициент усиления системы до значения kск , необходимо увеличить коэффициенты усиления функционально необходимых эшлементов либо включить дополнительные усилители.
Поскольку
W ск (P)= kск /P(T2 P+1)(Т2к Р+1)
W ск (P)=W(P)Wк (P)=kск (T1к P+1)/P(T1 P+1)(T2 P+1)(Т2к Р+1)
W р (P)=k/P(T1 P+1)( T2 P+1), (T1 > T2 ).
 Заключение
Заключение
В ходе выполнения курсового проекта был произведен расчет устойчивости системы при помощи критерия устойчивости Найквиста с использованием ЛЧХ.
Произведя расчеты и построив графики, выяснили, что система является устойчивой; был рассчитан коэффициент усиления. Следовательно можно выбрать корректирующее устройство.
Данная система находит свое применение в авиастроении, на предприятиях в следящих устройствах, в регулировании автоматических систем, в радиоэлектронике и схемотехнике.
 Литература
Литература
[Электронный ресурс]//URL: https://drprom.ru/referat/avtomaticheskoe/
Бесекерский В. А., Попов Е. П. Теория систем автоматического регулирования. Издание третье, исправленное. Издательство «Наука». Москва 1975
Зайцев А. П. Основы теории автоматического управления. Москва 2000