
2. Цель и задачи исследования, планируемые результаты
Цель — снижение экономических затрат на транспортировку воды потребителям за счёт уменьшения и контроля объемов утекаемой воды в районной системе водоснабжения. Повышение надежности и длительности эксплуатации водопроводной сети.
На основании уже проведенных исследований районных систем водоснабжения г. Донецка и изученных проблем, был поставлен ряд задач проектирования системы автоматического управления.
- Уменьшение избыточного давления в районной сети водоснабжения за счет разработки системы автоматического управления давлением воды, что позволит увеличить срок эксплуатации системы водоснабжения.
- Усовершенствование установленных технических средств с целью повышения надежности и бесперебойной работы системы, а также пригодности к эксплуатации в условиях влажной среды.
- Внедрение новых методов регулирования технологических процессов на контрольных пунктах, а также новых методов управления насосами на водопроводном узле.
- Программная реализация функций защиты с целью реализации восстанавливаемости системы.
- Модернизация существующей системы телеметрии и диспетчеризации распределенных контрольных пунктов.
В рамках магистерской работы ожидается получение актуальных научных результатов по следующим направлениям:
- переоборудование комплекса технических средств автоматизации водопроводной сети с максимальным повышением надежности системы в целом и её отдельных узлов в частности;
- разработка методов эффективного управления давлением на участках сети, которые позволят снизить затраты на транспортировку воды и минимизировать наносимый ущерб оборудованию;
- централизованный сбор и мониторинг всех необходимых данных о состоянии системы водоснабжения без участия человека.
3. Анализ районной системы водоснабжения
Водопроводная сеть района — это сложный многоуровневый объект жилищно–коммунального хозяйства города, предназначенный для транспортировки воды для питья и технических целей из одного места (обыкновенно водозаборных сооружений) в другое — к водопользователю (городские и заводские помещения).
Он является одним из основных элементов системы водоснабжения.
Главное назначение районной системы водоснабжения — обеспечить водой каждую конечную точку потребления охватываемой территории, причем с таким минимально необходимым уровнем давления воды, достаточным для бесперебойной работы каждого критического узла и наносящим минимальный ущерб транспортной сети [ 1 ].
Прокладка трубопровода в системе водоснабжения
... называется районной или групповой системой водоснабжения[4]. Централизованная система водоснабжения населенного пункта или промышленного предприятия должна обеспечивать прием воды из источника, ... 1. Системы водоснабжения и режимы их эксплуатации водоснабжение технологический трубопровод 1.1 Усовершенствования основных элементов систем водоснабжения и их классификаций Под системой водоснабжения ...
Районная система водоснабжения является распределенной и состоит из главного водопроводного узла, водоводов, удаленных контрольных пунктов и ответвлений сети (рис.1).
Водопроводный узел служит для передачи воды от входящих магистральных водоводов к нисходящим потребительским путем нагнетания водяного давления и его распределения между нисходящими водоводами. Удаленные контрольные пункты выполняют задачи контроля и регулирования давления воды непосредственно на входе в потребительскую зону.
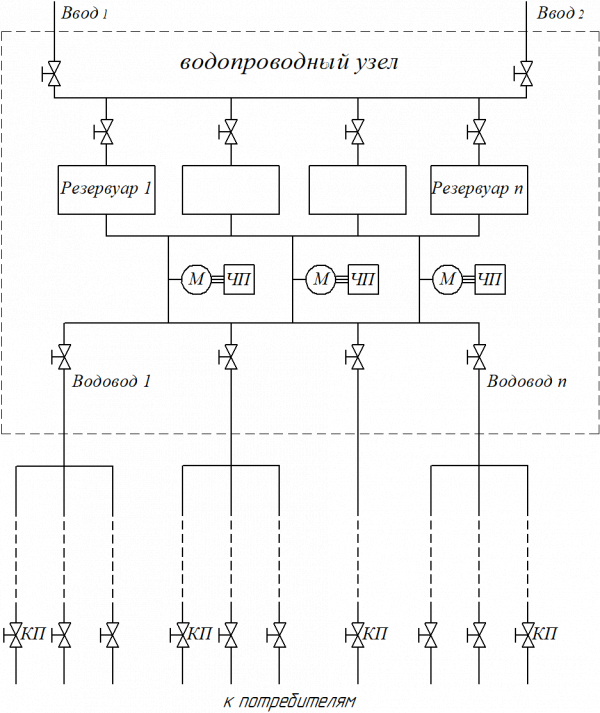
Рисунок 1 — Функциональная схема типовой районной системы водоснабжения г. Донецка
Система насосов нагнетает воду из резервуаров с необходимым уровнем давления для дальнейшей транспортировки. Каждый насос управляется частотным преобразователем, а вся насосная система обладает принципом резервирования для бесперебойной подачи воды потребителям. На узле существуют разветвления — водоводы, которые в дальнейшем доставляют воду в территориально распределенные части района [ 2 ]. Каждый из водоводов на выходе из водопроводного узла имеет свой регулятор давления.
В распределенной водопроводной транспортной сети возникает ряд проблем. В связи с рельефом местности (рис. 2), различающимся диаметром трубопровода на разных участках сети, избыточным давлением воды, а также существующим порывам трубопровода, в сети возникают гидравлические удары.
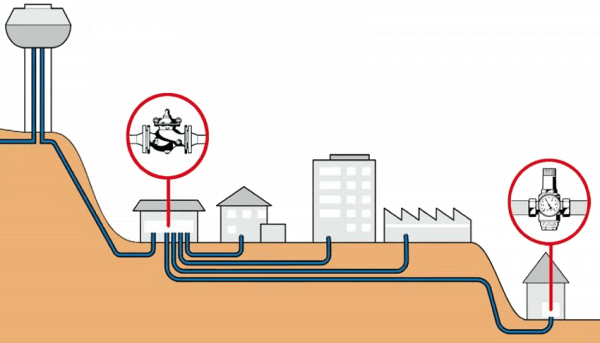
Рисунок 2 — Влияние неровности рельефа и распространения высотного строительства на давление воды в трубопроводах
Гидравлические удары негативно влияют на установленное на трубопроводе оборудование и непосредственно наносят существенный ущерб трубопроводу (рис. 3).
Это приводит к появлению новых порывов и утечек, а, следовательно, увеличивает экономические затраты на водообеспечение потребителей и значительно снижает срок эксплуатации системы.
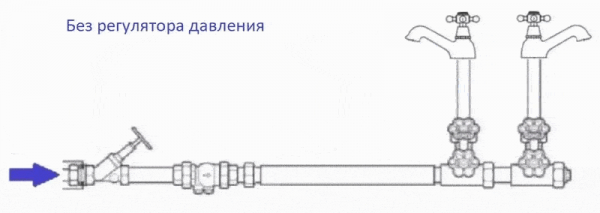
Рисунок 3 — Влияние гидроудара на трубопровод с установленным регулятором давления и без него
(анимация: 20 кадров, 10 циклов повторения, 79 килобайт)
Утечки — количество утерянной воды в процессе её транспортировки от источника к конечному потребителю вследствие повреждений сети. Устаревшие коммуникации трубопроводов, негерметичные уплотнения, старая или некачественная арматура, механические повреждения, а также ряд других факторов приводят к серьёзным утечкам и потерям воды в современных городских системах водоснабжения [ 3 ].
Утечку можно определить, как неучтённую потерю воды в системе водоснабжения. Цена утечек складывается из непосредственно стоимости потерянной воды, дополнительных затрат на подготовку, очистку и подачу недостающей воды, а также из дополнительных капитальных вложений на увеличение мощностей водопроводных сетей, очистных сооружений, строительство новых насосных станций и т.д. С ростом давления нелинейно увеличиваются и утечки (рис. 4).
Автоматизация системы водоснабжения
... показателя pH будет производить PH-018 (ЭкоЮнит). водоснабжение автоматизация контроллер Рисунок 3 - PH-018 Область применения: мониторинг и ... работы в тяжелых условиях с плохим качеством исходной воды, а также может использоваться для очистки воды с низким давлением ... водопроводной сети. Вся отработавшая вода сбрасывается в источник ниже (по течению) места забора воды. При необходимости эта вода ...
Это в свою очередь приводит к избыточному увеличению расхода воды.
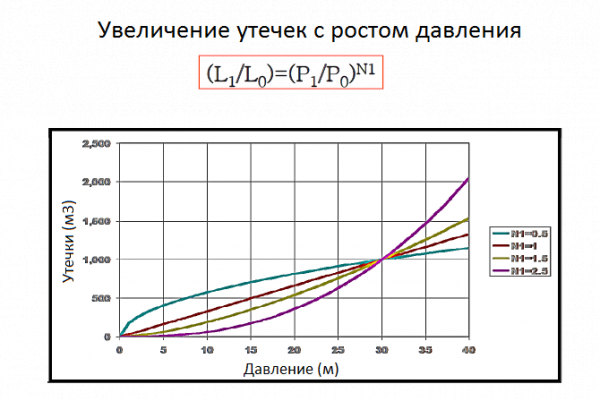
Рисунок 4 — Зависимость утечек от давления в сети
Также известно, что расход воды в системах водоснабжения изменяется с достаточно постоянной цикличностью повышаясь до максимума в утренние и вечерние часы и снижаясь до минимума в ночные часы [ 4 ]. При этом давление в критическом узле изменяется с той же цикличностью, повышаясь до максимума при минимальном расходе в ночные часы, и снижается до минимума при максимальном расходе в часы пик (рис. 5).
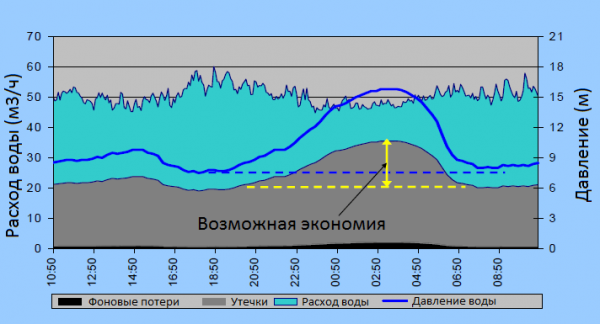
Рисунок 5 — Изменение давления, расхода и количества утечек в сети в течение суток
Таким образом, в разное время суток необходимо подавать потребителям воду с разным давлением [ 5 ]. Появляется необходимость постоянного изменения уставки.
Также стоит учитывать, что в существующих районных системах водоснабжения установлено неусовершенствованное и ненадежное оборудование. Как видно из графика (рис. 6), имея определенный уровень давления воды на выходе одного из контрольных пунктов, периодически приборы прекращали срабатывать, а показания выпадали
и не соответствовали действительности.
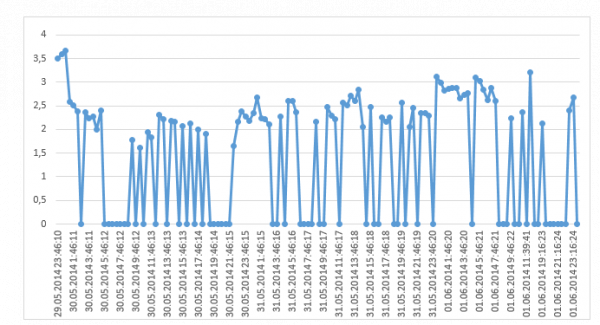
Рисунок 6 — Показания давления воды на контрольном пункте
Среди существующих проблем актуален и отказ приборов вследствие затопления контрольного пункта (рис. 7).
Как следствие, адекватная удаленная обратная связь с объектом теряется [ 6 ]. Таким образом, следует сделать вывод, что применяемое на объекте оборудование не обладает требуемым уровнем надежности и защиты для эксплуатации в условиях среды с повышенной влажностью.
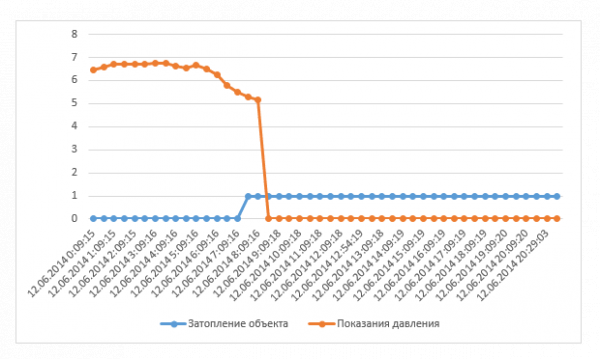
Рисунок 7 — Отказ прибора вследствие затопления контрольного пункта
4. Обзор и анализ известных решений по автоматизации систем водоснабжения
4.1 Решения по автоматизации двигателей нагнетающих насосов
В системе водопроводного узла установлены асинхронные двигатели переменного тока. Наиболее распространенными являются следующие способы регулирования скорости асинхронного двигателя: изменение дополнительного сопротивления цепи ротора, изменение подводимого к обмотке статора двигателя напряжения, изменение частоты питающего напряжения, а также переключение числа пар полюсов [ 7 ]. Метод переключения числа пар полюсов не подходит для решения исследуемых задач, так как требует замены существующих электродвигателей на двигатели с наличием нескольких обмоток в статоре.
Расчеты преобразователя частоты для регулирования скорости асинхронного ...
... систем управления, прогрессивных конструкторских и схемотехнических решений. Создаются также специальные асинхронные двигатели, предназначенной для работы в режиме регулирования скорости от преобразователей частоты. Ведущие ... 1=0,62о.е. X́1=0,14o.e. R˝2=0,029o.e. X˝2=0,18o.e. Частота вращения n=750об/мин. 2. Выбор схемы преобразователя Автономный инвертор напряжения строится по мостовой схеме. ...
Большинство современных систем регулирования скорости вращения двигателя построено на принципе частотного управления. Для решения задач регулирования скорости и момента в современном электроприводе применяют два основных метода частотного управления:
- скалярное управление;
- векторное управление.
Асинхронный электропривод со скалярным управлением является на сегодняшний день наиболее распространенным. Он применяется в составе приводов насосов, вентиляторов, компрессоров и других механизмов, для которых важно поддерживать либо скорость вращения вала двигателя (при этом используется датчик скорости), либо технологический параметр (например, давление в трубопроводе, при этом используется соответствующий датчик).Основной принцип скалярного управления — изменение частоты и амплитуды питающего напряжения [ 8 ]. Максимальный диапазон регулирования скорости вращения ротора при неизменном моменте сопротивления для электроприводов со скалярным управлением достигает 1:10.
Метод скалярного управления относительно прост в реализации, но обладает двумя существенными недостатками. Во–первых, при отсутствии датчика скорости на валу двигателя невозможно регулировать скорость вращения вала, так как она зависит от нагрузки. Наличие датчика скорости решает эту проблему, однако остается второй существенный недостаток — нельзя регулировать момент на валу двигателя [ 9 ]. С одной стороны, и эту проблему можно решить установкой датчика момента, однако такие датчики имеют очень высокую стоимость, зачастую превышающую стоимость всего электропривода. Но даже при наличии датчика управление моментом получается очень инерционным. Более того, при скалярном управлении нельзя регулировать одновременно и момент, и скорость, поэтому приходится выбирать ту величину, которая является наиболее важной для данного технологического процесса.
Для устранения недостатков, присущих скалярному управлению, фирмой SIEMENS еще в 1971 году был предложен метод векторного управления. [ 10 ] Первые варианты электроприводов с векторным управлением требовали использования двигателей со встроенными датчиками потока. Это существенно ограничивало применение таких приводов. В современных электроприводах в систему управления закладывается математическая модель двигателя, которая позволяет рассчитывать момент на валу и скорость вращения вала. При этом необходимыми являются только датчики тока фаз статора двигателя. Благодаря специальной структуре системы управления обеспечивается независимое и практически безынерционное регулирование двух основных параметров — момента на валу и скорости вращения.
На сегодняшний день сформировалось два основных класса систем векторного управления — бездатчиковые системы (без датчика скорости на валу двигателя) и системы с обратной связью по скорости [ 11 ]. Применение того или иного метода векторного управления определяется областью применения электропривода. При небольших диапазонах изменения скорости (не более 1:100) и требованиях к точности ее поддержания не более ±0,5% применяют бездатчиковое векторное управление. Если же скорость вращения вала изменяется в широких пределах (до 1:10000 и более), имеются требования к высокой точности поддержания скорости вращения (до ±0,02% при частотах вращения менее 1 Гц) или есть необходимость позиционирования вала, а также при необходимости регулирования момента на валу двигателя на очень низких частотах вращения, применяют методы векторного управления с обратной связью по скорости.
Механизмы и системы двигателя
... МЕХАНИЗМЫ И СИСТЕМЫ ДВИГАТЕЛЯ. Поршневой двигатель внутреннего сгорания состоит из следующих механизмов и систем: кривошипно-шатунного и газораспределительного механизмов, а также систем – питания, охлаждения, смазки, зажигания и пуска. Кривошипно-шатунный механизм воспринимает давление ... управления насос-форсунками и приводов служебного и аварийного остановов двигателя Подтянуть крепления двигателя, ...
При использовании векторного управления достигаются следующие преимущества:
- высокая точность регулирования скорости даже при отсутствии датчика скорости;
- плавное, без рывков, вращение двигателя в области малых частот;
- возможность обеспечения номинального момента на валу при нулевой скорости (при наличии датчика скорости);
- быстрая реакция на изменение нагрузки: при резких скачках нагрузки практически не происходит скачков скорости;
- обеспечение такого режима работы двигателя, при котором снижаются потери на нагрев и намагничивание, а, следовательно, повышается КПД двигателя.
Наряду с очевидными преимуществами, методу векторного управления присущи и некоторые недостатки, такие, как большая вычислительная сложность и необходимость знания параметров двигателя. Кроме того, при векторном управлении колебания скорости на постоянной нагрузке больше, чем при скалярном управлении [ 12 ]. Следует отметить, что существуют области, в которых возможно использование только скалярного управления, например, в групповом электроприводе, где от одного преобразователя питаются несколько двигателей.
4.2 Решения и методы понижения давления воды на контрольных пунктах
Наиболее актуальным и широко применяемым способом снижения давления воды в сети на контрольной точке является установка механического пружинного регулятора давления после себя
(рис. 8).
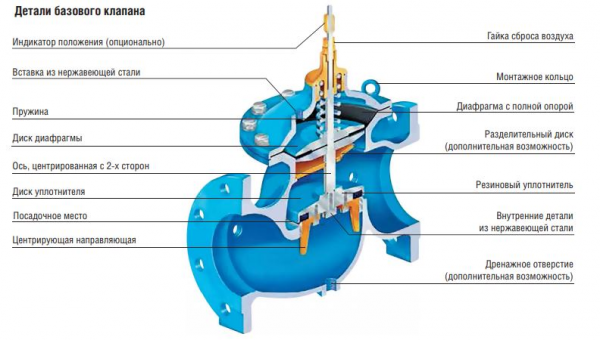
Рисунок 8 — Механический пружинный регулятор давления заменить картинку
Регуляторы давления — это устройства, служащие для уменьшения и поддержания давления воды до заданного значения на выходе, вне зависимости от расхода [ 13 ]. Такие устройства еще называют клапанами понижения давления или редукционными клапанами. Они работают по принципу уравновешивания усилий (третий закон Ньютона), действующих на мембрану: с одной стороны — силы напряжения пружины, а с другой — силы напора после редукции. В случае возникновения изменения входного давления подвижный шток регулятора станет в новое положение равновесия для заданной настройки давления и количества потребляемой воды (компенсация входного давления).
Таким образом, даже в случае сильных колебаний входного давления, оно быстро гасится, и на выходе регулятора давление удерживается на постоянном уровне. Механический пружинный регулятор имеет постоянную уставку, которая задается также механическим путем (вручную).
Главным недостатком такого решения является необходимость человеческого вмешательства ( подкручивания
) каждый раз для изменения уставки.
Механический регулятор давления не может обеспечить высокую точность регулирования, несмотря на его быстродействие. Также вследствие длительной эксплуатации пружинного регулятора происходит его износ и разбалансировка, а также повреждение и стирание
механических элементов регулятора.
Дело — система автоматизации делопроизводства и электронного ...
... способом документы, хранящиеся и обрабатываемые в системе автоматизации делопроизводства и электронного документооборота «ДЕЛО». При ... регистрация документа, созданного на основе проекта. Формирование поручений по документам; Управление прохождением документов ... виде. Электронный документооборот существенно повышает эффективность работы управленческого и производственного персонала: ускоряет ...
Наряду с механическими регуляторами, для решения задач понижения давления воды в сети последнее время стали внедряться пилотируемые (управляемые) задвижки (рис. 9).
Управляемая задвижка имеет конструктивно простое исполнение в сравнении с механическим регулятором давления. Однако неотъемлемой частью задвижки является электропривод и управляющий контроллер, что существенно увеличивает стоимость системы. Значительным преимуществом управляемой задвижки относительно механического регулятора является возможность удаленного управления и изменения уставки, а также высокие показатели качества регулирования [ 14 ].

Рисунок 9 — Задвижка баттерфляй с электроприводом
5. Проектирование системы автоматического управления
5.1 Обоснование принятого направления решения задачи
На данном этапе на водопроводных узлах г. Донецка в качестве нагнетающих насосов установлены асинхронные двигатели переменного тока. Исходя из проведенного анализа существующих решений и методов реализации управления скоростью вращения электродвигателя, решено реализовать метод частотного регулирования.
Автоматическое управление векторным частотным преобразованием качественнее всего выполнять методом широтно–импульсной модуляции [ 15 ]. Способы ШИМ управления позволяют максимально исключить потери энергии и обеспечивают высокий КПД преобразования за счет одновременного управления частотой и амплитудой. Таким образом, внедрение частотного преобразователя с векторным управлением в систему управления асинхронными двигателями для нагнетания давления воды позволит добиться таких улучшений качества эксплуатации системы:
- повышение точности регулирования скорости;
- устранение рывков в работе двигателя в рабочем диапазоне частот;
- увеличение быстродействия и реакции системы при резких изменениях возмущающих воздействий;
- повышение КПД двигателей и, как следствие, снижение энергозатрат.
С целью повышения надежности системы водоснабжения, а также бесперебойной её работы необходимо установить на каждый из нагнетающих давление воды двигателей отдельный частотный преобразователь. Принцип резервирования позволит добиться безотказной работы всей системы даже в случае выхода из строя одного или нескольких преобразователей, а также в период технического обслуживания двигателей, резервуаров и другого оборудования на водопроводном узле [ 16 ].
Для автоматизации удаленных контрольных пунктов было решено заменить механические регуляторы давления воды на управляемые задвижки. Главным преимуществом установки управляемых задвижек станет возможность изменения уставки давления воды удаленно в любое время суток.
Для реализации такого решения необходимо переоборудование контрольных пунктов. А именно, установка вспомогательных датчиков и исполнительного механизма — электропривода. Также принято решение использовать на контрольных пунктах понижения давления воды управляющий контроллер для сбора и обработки информации, формирования управляющих сигналов.
Система управления промышленным роботом
... крепится рабочий инструмент. 1.2 Принципы управления промышленным роботом. Современные роботы функционируют на основе принципов обратной связи, подчинённого управления и иерархичности системы управления роботом. Иерархия системы управления роботом подразумевает деление системы управления на горизонтальные слои, управляющие общим ...
Всю информацию о состоянии объекта необходимо периодически передавать на централизованный диспетчерский пункт. С диспетчерского пункта на объект должны передаваться соответствующие уставки давления воды и уровня воды в резервуарах хранения. Так как водопроводный узел и контрольные пункты понижения давления распределены на большой территории, а сам диспетчерский пункт удален от них, необходимо также разработать систему беспроводной передачи данных [ 17 ].
5.2 Функциональная схема технических средств системы автоматического управления
Согласно принятому направлению решения задачи проектирования системы автоматизации водопроводных узлов разработана функциональная схема автоматизации. Объект автоматизации является распределенным и состоит из главной части — водопроводного узла (рис. 10), удаленных частей —контрольных пунктов понижения давления (рис. 11), а также управляющего диспетчерского пункта.
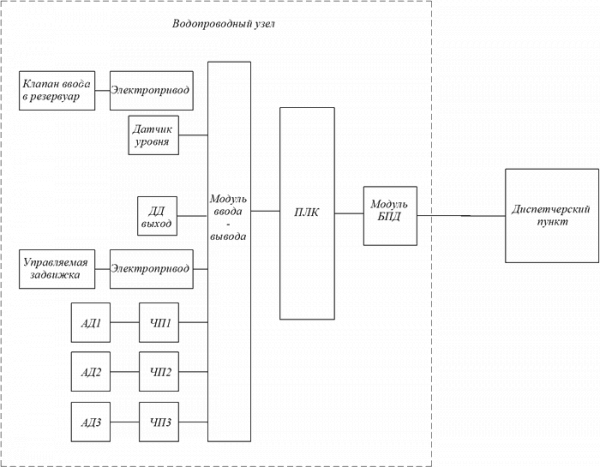
Рисунок 10 — Функциональная схема автоматизации водопроводного узла
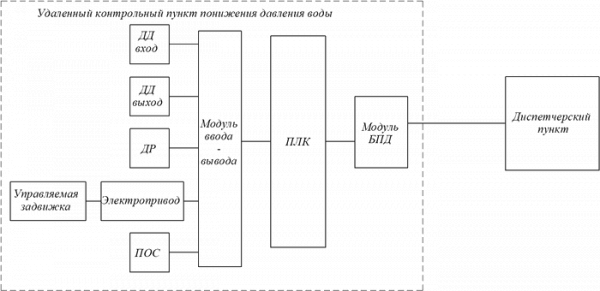
Рисунок 11 — Функциональная схема автоматизации удаленных контрольных пунктов понижения давления
Непосредственно водопроводный узел с точки зрения выбора средств автоматизации необходимо разделить на три составляющих:
- автоматизация нагнетающих давление воды двигателей;
- автоматизация заполнения резервуаров хранения воды;
- автоматизация установления требуемых уровней давления воды в выходных водоводах водопроводного узла.
Для управления асинхронными двигателями (АД1–3) было принято решение использовать бездатчиковые частотные преобразователи (ЧП), каждый из которых будет задавать скорость вращения соответствующего двигателя. Управляющие сигналы будут подаваться на частотные преобразователи из управляющего программируемого логического контроллера (ПЛК) с помощью модуля вывода сигналов.
В каждом из резервуаров хранения воды необходимо установить датчик уровня воды. Управляющим сигналом с помощью электропривода будут открываться или закрываться запирающие краны ввода воды в резервуар.
На каждом из выходных водоводов водопроводного узла необходимо поддерживать соответствующий, зачастую отличный от других, уровень давления воды. Для этого решено использовать управляемую задвижку. Необходимо установить датчики давления (ДД) воды перед задвижкой и после неё, а также датчик расхода воды (ДР).
Также на электропривод необходимо установить потенциометр обратной связи (ПОС), который позволит контроллеру знать текущее положение задвижки.
Для реализации двустороннего обмена информацией между ПЛК и диспетчерским пунктом было решено использовать беспроводные сети передачи данных. Для этого необходимо на каждый ПЛК дополнительно установить модуль беспроводной передачи данных.
Выводы
В результате проведенного анализа районной системы водоснабжения выявлено, что объект исследования состоит из центральной точки — водопроводного узла, и контрольных пунктов понижения давления. На водопроводном узле нагнетается давление из резервуаров с помощью насосов и распределяется между водоводами, согласно соответствующим уставкам. Контрольные пункты зачастую расположены на входах в потребительскую зону и служат для защиты потребителей от избыточного давления воды. Был проведен анализ существующих решений автоматизации водопроводных узлов сети водоснабжения и изучена проблематика объекта. Выяснено, что возможности совершенствования существующих систем не исчерпаны, а реализация современных методов автоматизации поможет решить ряд важных технических проблем и экономических задач. На основании проведенного анализа поставлены цели, установлены требования к системе и функции, которые должна выполнять система автоматического управления давлением воды на водопроводном узле. Приняты и обоснованы основные решения по проектированию системы автоматизации системы водоснабжения, составлена функциональная схема.
Механизация и автоматизация производства систем теплогазоснабжения и вентиляции
... автоматизации; охарактеризовать современные схемы управления системами кондиционирования воздуха. Комплекс инженерных систем теплогазоснабжения и кондиционирования микроклимата предназначен для выработки тепловой энергии, транспортирования горячей воды, ... гидравлического режима тепловых сетей необходимо перед потребителями поддерживать такой перепад давления теплоносителя, который во всех ...
Дальнейшие исследования направлены на следующие аспекты:
- разработка полной многоуровневой математической модели районной системы водоснабжения;
- минимизация управляющих воздействий регуляторов, используемых в системе;
- моделирование спроектированной системы и получение результатов;
- выбор исполнительных механизмов и комплекса технических средств в соответствие с полученными результатами моделирования;
- расчет итоговых экономических показателей эффективности модернизации районной системы водоснабжения.
При написании данного реферата магистерская работа еще не завершена. Окончательное завершение: июнь 2019 года. Полный текст работы и материалы по теме могут быть получены у автора или его руководителя после указанной даты.
Дата публикации реферата: декабрь 2018г.
Список источников
[Электронный ресурс]//URL: https://drprom.ru/referat/avtomatizatsiya-sistem-vodosnabjeniya-i-vodootvedeniya/
- Журба М.Г. Водоснабжение. Проектирование систем и сооружений / М.Г. Журба, Л.И. Соколов, Ж.М. Говорова — 2–е изд., перераб. и доп. — М.: Издательство АСВ, 2003. — 288 с.
- Петренко В.И. Водоснабжение и канализация / В.И. Петренко — М.: Высшая школа, 1992. — 415 с.
- Абрамов Н.Н. Расчёт водопроводных сетей: Учеб. пособие для вузов / Н.Н. Абрамов, М. М. Поспелова, М.А. Сомов — 4–е изд., перераб. и доп. — М.: Стройиздат, 1983. — 278 с.
- Зуев К.И. Автоматизация систем водоснабжения и водоотведения : учеб. пособие / К.И. Зуев ; Владим. гос. ун—т им. А. Г. и Н. Г. Столетовых. — Владимир : Изд–во ВлГУ, 2016. – 224 с.
- Бесекерский В.А. Теория автоматического регулирования и управления / В.А. Бесекерский, Е.П. Попов — М.: Наука, 1972. — 768 с.
- Филипс, Ч.Л. Системы управления с обратной связью /Ч.Л. Филлипс, Р.Д. Харбор; Пер.с англ.Б.И.Копылова. — М.: Лаборатория Базовых Знаний, 2001. — 616 с.
- Рульнов А.А. Автоматизация систем водоснабжения и водоотведения / А.А. Рульнов, К.Ю. Евстафьев — М.: Инфра, 2010. — 208 с.
- Лукас В.А. Теория автоматического управления: Учеб. для вузов / В.А. Лукас — 2–е изд., перераб. и доп. — М.: Недра, 1990. — 416 с.
- Олссон Г. Цифровые системы автоматизации и управления / О. Густав, П. Джангуидо. — 3–е изд., перераб. и доп. — СПб. : Невский Диалект, 2001. — 557 с.
- Дорф Р. Современные системы управления / Р.Дорф, Р. Бишоп; Пер. с англ. Б.И. Копылов. — М: Лаборатория базовых знаний, 2004. — 832 с.
- Клюев А.С. Проектирование систем автоматизации технологических процессов: справочное пособие / А.С. Клюев, Б.В. Глазов, А.Х. Дубровский, А.А. Клюев; под ред. А.С. Клюева. — 2–е изд., перераб. и доп. — М. : Энергоатомиздат, 1990. — 464 с.
- Бабиков М.А. Элементы и устройства автоматики: Уч. пособие для вузов / М.А. Бабиков, А. В. Косинский — М.: Высш. шк., 1975. — 464 с.
- Солодовников В.В. Основы теории и элементы систем автоматического регулирования / В.В. Солодовников, В.Н. Плотников, А.В Яковлев. — М.: Машиностроение, 1985. — 536 с.
- Вермишев Ю.Х. Основы автоматизации проектирования / В. Ю. Христофорович ; Ю. Х. Вермишев. — М. : Радио и связь, 1988. — 278 с.
- Гудвин Г.К. Проектирование систем управления / Г.К. Гудвин. — М.: БИНОМ. Лаборатория знаний, 2004. — 911 с.
- Воронов А.А. Теория автоматического управления / А.А. Воронов — М.: Высшая школа, 1986. — 367 с.
- Куо Ф. Протоколы и методы управления в сетях передачи данных / пер. с англ. — М.: Радио и связь, 1985. — 480 с.