
Способы регулирования асинхронного двигателя
Асинхронный двигатель является наиболее массовым электрическим двигателем. Эти двигатели выпускаются мощностью от 0,1 кВт до нескольких тысяч киловатт и находят применение во всех отраслях хозяйства. Основным достоинством асинхронного двигателя является простота его конструкции и невысокая стоимость. Однако по принципу своего действия асинхронный двигатель в обычной схеме включения не допускает регулирования скорости его вращения. Особое внимание следует обратить на то, что во избежание значительных потерь энергии, а, следовательно, для короткозамкнутых асинхронных двигателей во избежание перегрева его ротора, двигатель должен работать в длительном режиме с минимальными значениями скольжения.
Рассмотрим возможные способы регулирования скорости асинхронных двигателей (см. рис.1).
Скорость двигателя определяется двумя параметрами: скоростью вращения электромагнитного поля статора ω 0 и скольжением s:

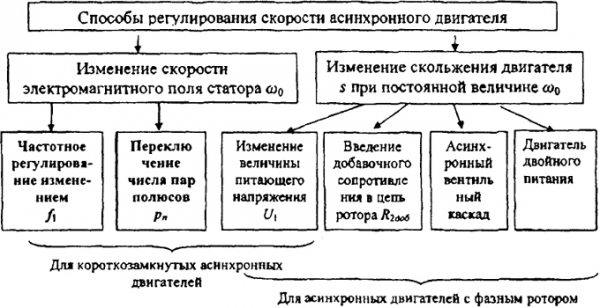
Рис.1. Классификация способов регулирования асинхронных двигателей
Исходя из (1) принципиально возможны два способа регулирования скорости: регулирование скорости вращения поля статора и регулирование скольжения при постоянной величине ω 0 .
Скорость вращения поля статора определяется двумя параметрами (см.3.3): частотой напряжения, подводимого к обмоткам статора f 1 , и числом пар полюсов двигателя рп . В соответствии с этим возможны два способа регулирования скорости: изменение частоты питающего напряжения посредством преобразователей частоты, включаемых в цепь статора двигателя (частотное регулирование), и путем изменения числа пар полюсов двигателя.
Регулирование скольжения двигателя при постоянной скорости вращения поля статора для короткозамкнутых асинхронных двигателей возможно путем изменения величины напряжения статора при постоянной частоте этого напряжения. Для асинхронных двигателей с фазным ротором, кроме того, возможны еще два способа: введение в цепь ротора добавочных сопротивлений (реостатное регулирование) и введение в цепь ротора добавочной регулируемой э.д.с. посредством преобразователей частоты, включаемых в цепь ротора (асинхронный вентильный каскад и двигатель двойного питания).
Двигатели постоянного тока: пуск, регулирование скорости, тормозные режимы
Статор является источником магнитного поля и механическим остовом машины, якорь - часть машины, в обмотке которой индуцируется э. д. с. Рис. 1. Устройство простейшего двигателя постоянного тока На одном валу с ...
В настоящее время благодаря развитию силовой преобразовательной техники созданы и серийно выпускаются различные виды полупроводниковых преобразователей частоты, что определило опережающее развитие и широкое применение частотно-регулируемого асинхронного электропривода. Основными достоинствами этой системы регулируемого электропривода являются:
- плавность регулирования и высокая жесткость механических характеристик, что позволяет регулировать скорость в широком диапазоне;
- экономичность регулирования, определяемая тем, что двигатель работает с малыми величинами абсолютного скольжения, и потери в двигателе не превышают номинальных.
Недостатками частотного регулирования являются сложность и высокая стоимость (особенно для приводов большой мощности) преобразователей частоты и сложность реализации в большинстве схем режима рекуперативного торможения.
Подробно принципы и схемы частотного регулирования скорости асинхронного двигателя рассмотрены ниже.
Изменение скорости переключением числа пар полюсов асинхронного двигателя позволяет получать несколько (от 2 до 4) значений рабочих скоростей, т.е. плавное регулирование скорости и формирование переходных процессов при этом способе невозможно.
Поэтому данный способ имеет определенные области применения, но не может рассматриваться, как основа для построения систем регулируемого электропривода.
2. Частотное регулирование асинхронных электроприводов
Принципиальная возможность регулирования угловой скорости асинхронного двигателя изменением частоты питающего напряжения вытекает из формулы ω = 2πf 1 (1 — s)/p. При регулировании частоты также возникает необходимость регулирования амплитуды напряжения источника, что следует из выражения U1 ≈ Е1 = kФf1 . Если при неизменном напряжении изменять частоту, то поток будет изменяться обратно пропорционально частоте. Так, при уменьшении частоты поток возрастет, и это приведет к насыщению стали машины и как следствие к резкому увеличению тока и превышению температуры двигателя; при увеличении частоты поток будет уменьшаться и как следствие будет уменьшаться допустимый момент.
Для наилучшего использования асинхронного двигателя при регулировании угловой скорости изменением частоты необходимо регулировать напряжение одновременно в функции частоты и нагрузки, что реализуемо только в замкнутых системах электропривода. В разомкнутых системах напряжение регулируется лишь в функции частоты по некоторому закону, зависящему от вида нагрузки.
Частотное регулирование угловой скорости электроприводов переменного тока с двигателями с короткозамкнутым ротором находит все большее применение в различных отраслях техники. Например, в установках текстильной промышленности, где с помощью одного преобразователя частоты, питающего группу асинхронных двигателей, находящихся в одинаковых условиях, плавно и одновременно регулируются их угловые скорости. Примером другой установки с частотно-регулируемыми асинхронными двигателями с короткозамкнутым ротором могут служить транспортные рольганги в металлургической промышленности, некоторые конвейеры и др.
Расчеты преобразователя частоты для регулирования скорости асинхронного ...
... также специальные асинхронные двигатели, предназначенной для работы в режиме регулирования скорости от преобразователей частоты. Ведущие зарубежные электротехнические фирмы уже освоили производство транзисторных и тиристорных преобразователей частоты для электропривода. Основой таких преобразователей являются, как правило, ...
Частотное регулирование угловой скорости асинхронных двигателей широко применяется в индивидуальных установках, когда требуется получение весьма высоких угловых скоростей (для привода электрошпинделей в металлорежущих станках с частотой вращения до 20 000 об/мин).
Экономические выгоды частотного регулирования особенно существенны для приводов, работающих в повторно-кратковременном режиме, где имеет место частое изменение направления вращения с интенсивным торможением.
Для осуществления частотного регулирования угловой скорости находят применение преобразователи, на выходе которых по требуемому соотношению или независимо меняется как частота, так и амплитуда напряжения. Преобразователи частоты можно разделить на электромашинные и вентильные. В свою очередь электромашинные преобразователи могут быть выполнены с промежуточным звеном постоянного тока и непосредственной связью. В последних используют коллекторную машину переменного тока, на вход которой подают переменное напряжение с постоянной частотой и амплитудой, а на выходе ее получают напряжение с регулируемой частотой и амплитудой. Электромашинные преобразователи с непосредственной связью практического применения не получили.
Регулирование скорости, тока и момента с помощью резисторов в цепях ротора и статора
Один из распространенных способов регулирования скорости, тока и момента АД с фазным ротором связан с введением и изменением дополнительных резисторов в цепи его ротора. Схема, в которой реализуется этот способ регулирования, приведена на рис. 4.7, а. Основным достоинством этого способа является простота реализации, что определило его широкое применение в ряде электроприводов.
Для построения семейства получаемых при этом способе искусственных механических характеристик проведем анализ их характерных точек. С помощью выражения для скорости идеального холостого хода ω0 = ρf1/p отмечаем следующее:
1) скорость идеального холостого хода АД ω 0 при регулировании Rд2 не изменяется;
2) максимальный (критический) момент двигателя Мк также остается неизменным;
3) критическое скольжение Sк увеличивается при увеличении R 2д .
Использование этих характеристик для регулирования скорости АД характеризуется такими же показателями, что и для ДПТ независимого возбуждения. Диапазон регулирования скорости небольшой — около 2 — 3, что определяется снижением жесткости характеристик и ростом потерь по мере увеличения диапазона регулирования скорости.
Плавность регулирования при реостатном регулировании небольшая и определяется плавностью изменения дополнительного резистора R2д. Скорость АД изменяется только вниз от основной.
Экономичность способа определяется стоимостью используемых средств регулирования и расходами при эксплуатации электропривода. Затраты, связанные с созданием данной системы электропривода, невелики, так как для регулирования обычно используются простые и дешевые ящики металлических резисторов. В то же время при эксплуатации этой системы затраты велики, поскольку значительны потери энергии.
Электрические потери в роторной цепи ΔР2, называемые потерями скольжения. Чем больше скольжение s, тем больше потери в роторной цепи, поэтому реализация большого диапазона регулирования скорости приводит к значительным потерям энергии и снижению КПД электропривода.
Измеритель вертикальных скоростей
... при снижении. По шкале определяют величину вертикальной скорости. Применяют и другие способы получения затухающей шкалы. Например, у вариометров с большим пределом измерения затухание шкалы достигается ... элементов, сокращением их массы и применением амортизации блоков. Для повышения надежности работы СВС упругие чувствительные элементы анероидных и манометрических датчиков изготавливают из ...
Регулирование скорости этим способом применяется в тех случаях, когда требуется небольшой диапазон регулирования скорости и работа на пониженных скоростях непродолжительна. Например, этот способ нашел широкое применение в электроприводе ряда подъемно-транспортных машин и механизмов.
Рассматриваемый способ также используется для регулирования тока и момента АД при его пуске.
Если обратиться к характеристикам двигателя, то можно отметить, что за счет подбора сопротивления резистора пусковой момент АД может быть увеличен вплоть до значения критического момента Мк. Это свойство АД используется при его пуске с моментом нагрузки, превышающим пусковой момент АД Мп на естественной характеристике.
Пусковой ток АД уменьшается по мере увеличения R 2д , что позволяет с помощью введения добавочных резисторов осуществлять его ограничение.
Задача по расчету дополнительных резисторов в цепи ротора обычно формулируется следующим образом. Задана искусственная механическая характеристика АД (полностью или частично) или отдельная точка этой характеристики с координатами ω и , Ми . Найти сопротивление дополнительного резистора R2д , при включении которого в цепь ротора АД будет иметь заданную искусственную характеристику или же она будет проходить через заданную точку. При этом предполагается, что естественная механическая характеристика АД известна (рассчитана или снята экспериментально).
Отметим, что требуемая искусственная характеристика может быть задана по условиям пуска или регулирования скорости.
Расчет сопротивления добавочного резистора R 2д может быть выполнен несколькими способами в зависимости от формы задания требуемой искусственной механической характеристики.
1. Искусственная характеристика задана полностью и известен участок критического момента. В этом случае расчет целесообразно вести по формуле, с помощью которой находится отношение критических скольжений АД на естественной и искусственной характеристиках,
2. Если искусственная характеристика задана своей рабочей частью и участок критического момента не определен, то удобно использовать метод отрезков, Чаще всего этот способ применяется для АД с короткозамкнутым ротором, у которых нельзя использовать цепь ротора для включения каких-либо регулирующих устройств. Так же используется включение резистора в одну фазу, что позволяет получить примерно такие же характеристики двигателя при уменьшении количества регулирующих элементов.
Искусственные характеристики построены исходя из анализа характерных точек механической характеристики, а именно:
1. Скорость идеального холостого хода ω 0 не зависит от сопротивления фазы статора R1 , поэтому все искусственные характеристики проходят через одну и ту же точку на оси ординат.
2. Критические момент и скольжение АД уменьшаются по мере увеличения R 1д .
3. Пусковой момент АД М п , также уменьшается при увеличении R1д .
Искусственные характеристики мало пригодны для регулирования скорости АД: они обеспечивают небольшой диапазон изменения скорости; жесткость характеристик АД и его перегрузочная способность, характеризуемая критическим моментом, по мере увеличения R 1д снижаются; способ отличает и низкая экономичность.
Технология ремонта обмоток электрических машин
... статора проводов катушки всыпной обмотки При ремонте электрических машин старых конструкций с закрытыми пазами рекомендуется до начала демонтажа обмотки снять с натуры ее обмоточные данные (диаметр провода, число ... принимается в зависимости от числа полюсов, 2р = 2; 4; 6; 8; К = 1,3; 1,35; 1,45; 1,55 (соответственно). Для однослойной концентрической обмотки приближенную величину определяют, умножая ...
В силу этих недостатков регулирование скорости АД с помощью активных резисторов в цепи его статора применяется редко. Этот способ обычно используется для ограничения токов и моментов АД с короткозамкнутым ротором в различных переходных процессах — при пуске, реверсе и торможении. Например, такая схема применяется в электроприводе лифтов, имеющем двухскоростной АД. В таких электроприводах при переходе с высокой скорости на пониженную в цепь низкоскоростной обмотки статора вводится добавочный резистор, который обеспечивает ограничение тока и момента АД.
4. Регулирование скорости ад изменением числа пар полюсов
Этот способ используется для регулирования скорости многоскоростных АД с короткозамкнутым ротором. Возможность получения искусственных характеристик АД данным способом, и следовательно, регулирования его скорости, непосредственно следует из выражения для угловой скорости магнитного поля АД ω 0 = 2 πf1 /p.
Изменение числа пар полюсов АД р производится за счет переключений в обмотке статора, при этом число пар полюсов короткозамкнутого ротора изменяется автоматически. Так как количество полюсов АД может быть равным только целому числу — 1, 2, 3 и т. д., то следовательно, данный способ обеспечивает только ступенчатое регулирование скорости. Двигатели, допускающие регулирование скорости этим способом, получили название многоскоростных.
Изменение числа полюсов АД достигается, когда на статоре АД располагаются две (или больше) не связанные друг с другом обмотки, имеющие разное число пар полюсов р 1 и р2 . При подключении к сети одной обмотки, например с p1 парами полюсов, АД имеет синхронную скорость
![]()
Вторая обмотка при этом обесточена. Для получения другой скорости отключается первая обмотка и подключается на сеть вторая обмотка с р2 парами полюсов, при этом синхронная скорость АД станет равной
![]()
и АД будет иметь уже другую механическую характеристику.
Наряду с такими АД, получившими название многообмоточных, широкое распространение получил другой тип многоскоростных АД, у которых изменение числа пар полюсов вращающегося магнитного поля достигается за счет изменения схемы соединения статорной обмотки АД. Для этого каждая фаза статора разделена на несколько одинаковых частей (чаще всего на две части) и имеет от них соответствующее число выводов.
Рассмотрим принцип получения различного числа пар полюсов при переключении частей обмотки статора на следующем упрощенном примере.
На рис. 1 показана схема одной фазы статорной обмотки, которая состоит из двух одинаковых частей 1н—1к, 2н—2к, имеющих два проводника. Если секции соединены так, как это показано на рис. 4.9, а, и к обмотке статора подведен ток I, имеющий в данный момент времени направление, показанное стрелками, то образуется магнитное
Расчет обмотки статора трехфазного асинхронного двигателя при ...
... двухслойную петлевую обмотку. 4 Расчёт обмоточных данных Обмотка асинхронного двигателя, размещённая в магнитопроводе его статора состоит из трёх самостоятельных фазных обмоток (А, В, С). Обмотка трёхфазной ... обмоточными данными: у — шаг обмотки; q — число пазов на полюс и фазу (равно числу секций в катушечной группе); N — число катушечных групп; число электрических градусов, приходящихся на один ...
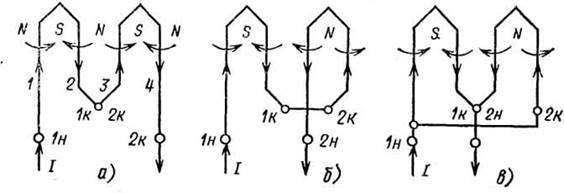
Рис. 1. Изменение числа пар полюсов обмотки статора
поле с четырьмя полюсами, т. е. p = 2 (направление магнитных силовых линий определяем с помощью правила буравчика).
Оставив направление тока тем же, изменим несколько схему соединения обмотки, подключив конец первой секции 1к к концу второй 2к (рис. 1б).
Из рис. 1б следует, что в этом случае статорная обмотка образует магнитное поле с числом пар полюсов, вдвое меньшим по сравнению с полем рис. 1а. Уменьшение вдвое числа пар полюсов достигается и в схеме рис. 1в, где секции соединены параллельно (1н с 2к, 1к с 2н).
В том и другом случае (рис. 1 б и в) уменьшение числа пар полюсов, и следовательно, увеличение скорости АД, достигается изменением направления тока на противоположное в одной из секций (в данном случае во второй).
При этом диапазон изменения угловой скорости магнитного поля равен двум.
Наиболее часто на практике встречаются две схемы переключения статорной обмотки многоскоростных АД: 1) с треугольника (Д) на двойную звезду (УУ); 2) со звезды (У) на двойную звезду (УУ)..
Рассмотрим схемы соединения статора ‘и механические характеристики АД для этих случаев.
Треугольник — двойная звезда. Для получения большего числа пар полюсов р^ секции каждой фазы статора включены в треугольник согласно, т. е. так, как это показано на рис. 2а, где А 1н и A2н — начала соответственно первой и второй секций фазы A; А1к и A2к — их концы. Обозначения для выводов секций фаз В и С, схемы включения которых аналогичны схемам фазы A, опущены. Соединение секций по схеме рис.2 б, как отмечалось выше, вызовет уменьшение в 2 раза числа пар полюсов АД. Схема рис. 2б, получила название двойной звезды.
Для получения общего вида механических характеристик определим допустимую мощность АД при включении его статора по схемам рис. 2, а и б. Учитывая, что допустимый ток в секции обмотки статора I 1доп = I1ном остается неизменным при переключении числа пар полюсов, допустимую первичную мощность определим:
для схемы треугольник (рис. 2, а)
![]() (1)
(1)
для схемы двойная звезда (рис. 2, б)

(2)
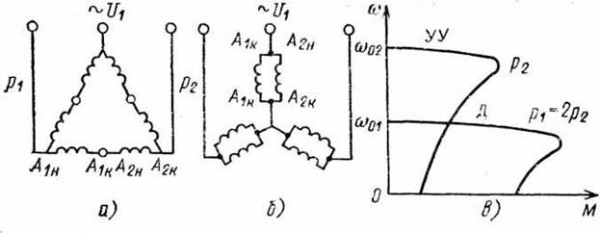
Рис. 2.
Соединение обмоток статора в треугольник (а), двойную звезду (б) и механические характеристики при схемах треугольник — двойная звезда (Д—УУ) (в)
Из полученных выражений следует, что при cos φ1д ≈ cos φ1уу допустимая мощность АД остается практически неизменной. Поэтому при увеличении вдвое числа пар полюсов АД и уменьшении тем самым вдвое синхронной скорости допустимый момент на валу АД увеличивается примерно в 2 раза. Механические характеристики АД для данного способа переключения обмоток показаны на рис. 2в. Они соответствуют регулированию скорости при постоянной мощности.
Спектрально двойные звезды
... регулярное смещение спектральных линий все равно выдаст ее истинную двойную природу. Нередко двойственность тесных пар звёзд можно выявить, изучая периодические изменения их блеска. Измерение скоростей звезд двойной системы ... от направления к полюсу мира против хода часовой стрелки от 0 до 360°. Если повторять такие измерения одной и той же двойной звезды спустя достаточно продолжительные ...
Звезда — двойная звезда. В этой схеме меньшей угловой скорости АД соответствует соединение обмоток статора, показанное на рис. 3а. Секции фаз статора
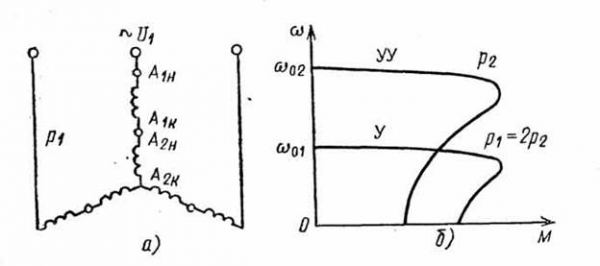
Рис. 3.
Соединение обмоток статора в звезду (а) и механические характеристики двигателя при схемах звезда — двойная звезда (б) соединены в этой схеме также последовательно и согласно и образуют при подключении АД к сети систему р1. пар полюсов вращающегося магнитного поля, которой соответствует синхронная скорость ω 01 . Переключение на двойную звезду осуществляется по схеме на рис. 2б, при этом число пар полюсов станет p2 = p1 /2. Получаемые механические характеристики такого двухскоростного АД изображены на рис. 3б,. В отличие от рассмотренной выше схемы переключения треугольник — двойная звезда, в которой регулирование скорости АД осуществляется при постоянной мощности нагрузки на его валу, в этой схеме изменение скорости может осуществляться при постоянном моменте нагрузки Мс . Это следует из рассмотрения выражений допустимой мощности АД, которая для схемы двойная звезда (рис. 4.10, б) определяется формулой (2), а для схемы звезда согласно рис. 3а — формулой
(3)
Из (2) и (3) видно, что допустимая мощность при переключении статорной обмотки на меньшее число пар полюсов (когда скорость АД увеличивается в 2 раза) возрастает также в 2 раза. Тем самым допустимые моменты при работе АД в обеих схемах включения примерно одинаковы и характеристики имеют показанный на рис. 3б вид.
Помимо рассмотренных двухскоростных АД применяются также трех- и четырехскоростные АД. Первые из них помимо переключаемой обмотки статора, выполняемой аналогично рассмотренной выше, имеют также и одну непереключаемую обмотку. Четырехскоростные АД с различным числом пар полюсов р 1 , р2 , p3 , p4 позволяют получить четыре различные механические характеристики.
Рассматриваемый способ регулирования скорости характеризуется рядом положительных показателей, что определяет широкое его применение в регулируемом электроприводе переменного тока. К ним в первую очередь следует отнести экономичность регулирования, так как регулирование скорости изменением числа пар полюсов не сопровождается выделением в роторной цепи больших потерь энергии скольжения, вызывающих излишний нагрев АД и ухудшающих его КПД.
Из рис. 2в и 3б видно, что механические характеристики многоскоростных асинхронных электродвигателей отличаются хорошей жесткостью и достаточной перегрузочной способностью.
Спектральная классификация звезд
... состав звезд. Гарвардская спектральная классификация. Особенности звездных спектров. Источники звёздной энергии. Рождение и срок жизни звезд. Гипотезы о причине взрывов звезд. реферат [ ... двойных звезд и методы их изучения. Обмен веществом в тесных двойных системах. Характерные примеры двойных звезд. Компоненты двойных звезд. Опыта изучения двойных звезд. Создание теорий внутреннего строения звезд ...
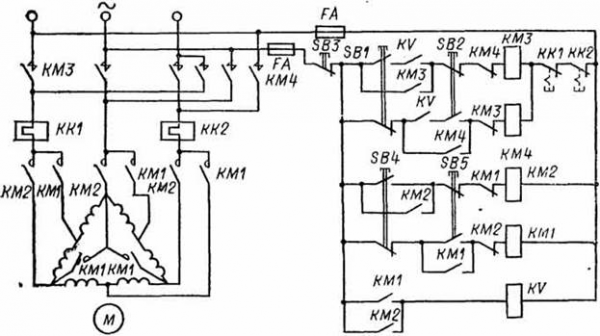
Рис. 4. Схема управления двухскоростным АД
Недостатком этого способа является ступенчатость изменения скорости двигателя и относительно небольшой диапазон ее регулирования, не превышающий обычно 6—8.
На рис. 4 показана практическая схема управления двухскоростным АД с короткозамкнутым ротором. Схема обеспечивает две скорости АД путем соединения обмотки статора в треугольник или двойную звезду, а также его реверсирование. Она состоит из контакторов большой КМ1 и малой КМ2 скорости, линейных контакторов направления вращения АД «Вперед» КМ3 и «Назад» КМ4, блокировочного реле KV и кнопок управления SB3, SB1, SB2, SB4, SB5. Защита электропривода осуществляется тепловыми реле KK1 и КК2 и предохранителями FA.
Для пуска АД, например, на низкую скорость нажимается кнопка SB4, после чего срабатывает контактор КМ2 и реле KV. Статор АД оказывается включенным по схеме треугольник, а реле KV, замкнув свои контакты в цепях аппаратов КМЗ и КМ4, подготавливают двигатель к подключению к сети. Далее нажатие кнопки SB1 или SB2 приводит к включению АД соответственно в направлении «Вперед» или «Назад».
После разбега АД до низкой скорости может быть осуществлен его разгон до высокой скорости. Для этого должна быть нажата кнопка SB5, что приведет к отключению контактора КМ2 и включению контактора KM1 и пересоединению в результате этого обмотки статора со схемы треугольник на схему двойная звезда.
Остановка АД производится нажатием кнопки SB3, после чего он отключается от сети и схема возвращается в исходное положение.
Применение двухцепных кнопок в схеме позволяет осуществить блокировку от одновременного срабатывания контакторов КМ1 и КМ2, КМЗ и КМ4. Этой же цели служат включенные в цепи катушек этих контакторов размыкающие блокировочные контакты КМ1, КМ2, КМЗ, КМ4.
Список литературы:
[Электронный ресурс]//URL: https://drprom.ru/referat/chastotnoe-regulirovanie-asinhronnogo-dvigatelya/
Были использованы материалы сайта www.edulib.ru