
Простейший в серии 1816 микроконтроллер МК48 имеет на кристалле (в корпусе БИС) следующие аппаратурные средства: процессор разрядностью 1 байт; стираемое программируемое ПЗУ программ емкостью 1 Кбайт; ОЗУ данных емкостью 64 байта; программируемый 8-битный таймер/счетчик; программируемые схемы ввода/вывода (27 линий); блок векторного прерывания от двух источников; генератор; схему синхронизации и управления.
Значительно более сложный и развитый МК51 имеет в своем составе такие аппаратурные средства: процессор, в состав которого входят 1-байтное АЛУ и схемы аппаратурной реализации команд умножения и деления; стираемое ПЗУ программ емкостью 4 Кбайта, ОЗУ данных емкостью 128 байт; два 16-битных таймера/счетчика; программируемые схемы ввода/вывода (32 линии); блок двухуровневого векторного прерывания от пяти источников; асинхронный канал дуплексного последовательного ввода/вывода информации со скоростью до 375 кбит/с; генератор, схему синхронизации и управления.
Структуры микроконтроллеров серии 1816 и их системы команд таковы, что в случае необходимости функционально-логические возможности контроллеров могут быть расширены. С использованием внешних дополнительных БИС постоянной и оперативной памяти адресное пространство МК может быть значительно расширено, а путем подключения различных интерфейсных БИС число линий связи МК с объектом управления может быть увеличено практически без ограничений.
Микроконтроллеры серии 1816 требуют одного источника электропитания напряжением +5В ± 10%, рассеивают мощность около 1,5 Вт и работают в диапазоне температур от 0 до 70 °С. По входам и выходам МК серии 1816 электрически совместимы с интегральными схемами ТТЛ. МК48 и МК51 имеют различные системы команд и, следовательно, не обладают свойством программной совместимости на уровне объектных кодов. При этом они программно совместимы по принципу «снизу вверх» (МК48 → МК51) на уровне исходных текстов программ, написанных на языке ассемблера.
Микроконтроллер МК48 может работать в диапазоне частот синхронизации от 1 до 6 МГц, а минимальное время выполнения команды составляет 2,5 мкс. Микроконтроллер МК51 может работать в диапазоне частот от 1,2 до 12 МГц, при этом минимальный цикл выполнения команды равен 1 мкс, а быстродействие равно одному миллиону коротких операций в секунду.
Из такой краткой характеристики однокристальных МК серии 1816 видно, что эти приборы обладают значительными функционально логическими возможностями и представляют собой эффективное средство компьютеризации (автоматизации на основе применения средств и методов обработки данных и цифрового управления) разнообразных объектов и процессов.
Разработка системы управления роботом
... управлением понимается не только непосредственное управление от микроконтроллера каждым ключом силового преобразователя (инвертора и управляемого выпрямителя, если он есть), но и обеспечение возможности прямого ввода в микроконтроллер ... управления промышленным роботом. Требуется обеспечить управление двигателем постоянного тока, приводящим робот ... схема практической части блока управления ...
1. Основные характеристики счетчиков
Счетчиком называют устройство, совокупность сигналов на выходе которого в определенном коде отображает число импульсов, поступивших на его вход.
Для создания счетчиков несколько триггеров Т-типа соединяют последовательно, так, чтобы выход предыдущего триггера был подключен ко входу последующего. Каждый триггер имеет только два устойчивых состояния. Поэтому количество комбинаций выходных сигналов, снимаемых с выходов всех триггеров, а соответственно и максимальное количество подсчитанных импульсов N равно
где т — количество последовательно включенных триггеров.
Каждый из триггеров такой цепочки называют разрядом счетчика. Поэтому, если, например, т = 4, то говорят, что счетчик четырехразрядный. Максимальное число, которое может подсчитать счетчик![]() называется коэффициентом, или модулем, счет.
называется коэффициентом, или модулем, счет.
![]()
Если количество входных импульсов![]() больше
больше![]() то происходит переполнение счетчика. При этом он возвращается в нулевое состояние и цикл счета повторяется. Поэтому коэффициент счета характеризует число входных импульсов, необходимых для того, чтобы один цикл преобразования был выполнен и счетчик вернулся в исходное состояние.
то происходит переполнение счетчика. При этом он возвращается в нулевое состояние и цикл счета повторяется. Поэтому коэффициент счета характеризует число входных импульсов, необходимых для того, чтобы один цикл преобразования был выполнен и счетчик вернулся в исходное состояние.
В случаях, когда выходной сигнал снимается только с последнего триггера, его перепад 1, 0 или 0, 1 появляется после каждого цикла счета, определяемого коэффициентом счета![]() Поэтому при подаче на вход непрерывной последовательности импульсов с частотой fBX на его выходе будем иметь последовательность, имеющую частоту
Поэтому при подаче на вход непрерывной последовательности импульсов с частотой fBX на его выходе будем иметь последовательность, имеющую частоту
![]()
Такие счетчики выполняют функцию деления частоты и называются счетчиками-делителями.
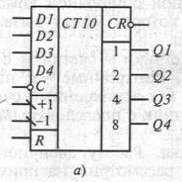
Меткой счетчика на схемах служат буквы СТ, указываемые в основном поле (рис 1, а).
После них иногда проставляют число, характеризующее коэффициент счета, например, 2 или 10.
По коэффициенту счета счетчики подразделяют на двоичные, двоично- десятичные (декадные), с произвольным постоянным коэффициентом счета, с переменным коэффициентом счета.
По способу организации внутренних связей между триггерами их делят на счетчики: с последовательным переносом; с параллельным переносом; с комбинированным переносом; кольцевые.
В зависимости от выполняемой функции различают суммирующие, вычитающие и реверсивные счетчики.
Иногда рассматривают асинхронные и синхронные счетчики, что жестко связано с классификацией по способу организации внутренних связей.
В асинхронных счетчиках подсчитываемые импульсы поступают на вход только первого триггера. Каждый последующий триггер управляется сигналом предыдущего.
В синхронных счетчиках входные импульсы обычно подаются одновременно на вход С всех триггеров. Переключение только нужных из них осуществляется с помощью логических цепей, имеющихся на J-м и К-м входах отдельных триггеров.
Синхронные счетчики имеют большее быстродействие. Это объясняется тем, что в многоразрядных асинхронных счетчиках из-за задержки распространения в каждом разряде, переключение триггеров старших разрядов может задержаться относительно входных импульсов, которые следуют с большой частотой. Это приведет к кратковременной ошибочной комбинации мгновенного со стояния триггеров, которая может вызвать неверные сигналы на выходе дешифратора.
Асинхронные счетчики — счетчики с последовательным переносом информации, синхронные — с параллельным. Если часть устройства работает как асинхронный счетчик, а часть — как синхронный, то это счетчик с последовательно-параллельным переносом информации.
Двоичные счетчики. Работу двоичного счетчика с последовательным переносом рассмотрим на примере микросхемы 155ИЕ5 (рис. 1, 6).
Он выполнен на четырех синхронных JK-триггерах. Входы J и K всех триггеров объединены между собой и на них по дан потенциал логической единицы. Следовательно, все триггеры выполняют функцию T-трйггера и меняют свое состояние на противоположное при каждом переходе напряжения 1,0 на входе синхронизации С. Для расширения функциональных возможностей три триггера соединены в цепочку, а один включен раздельно. Имеются также два входа Ж Они являются входами ЛЭ DD5, имеющего инверсное управление. При подаче логического нуля на оба входа ЛО на выходе ЛЭ DD5 появляется логическая единица. Она устанавливает все триггеры счетчика в нулевое состояние.
Для получения четырехразрядного счетчика выход триггера DDI Q1 подключается ко входу синхронизации С2 триггера DD2. Входные импульсы подаются на вход синхронизации C1 микросхемы DD1.
Так как триггеры меняют свое состояние в момент перепада 1,0, то в момент окончания первого входного импульса на выходе QI появится логическая 1. В момент окончания второго импульса триггер DDI вернется в исходное нулевое состояние. При этом перепад сигнала 1,0 на выходе Q перебросит триггер DD2 в состояние 1. Третий импульс перебросит триггер DDI в единичное состояние. Четвертый импульс вызовет переброс первого и второго триггеров в нулевое состояние, а третьего — в единичное. Состояния триггеров счетчика при дальнейшем увеличении числа входных импульсов видно из таблицы истинности (табл.1).
Таблица 1
|
N |
Q1 |
Q2 |
Q3 |
Q4 |
|
0 |
0 |
0 |
0 |
0 |
|
1 |
1 |
0 |
0 |
0 |
|
2 |
0 |
1 |
0 |
0 |
|
3 |
1 |
0 |
0 |
|
|
4 |
0 |
0 |
1 |
0 |
|
5 |
1 |
0 |
1 |
0 |
|
6 |
0 |
1 |
1 |
0 |
|
7 |
1 |
0 |
0 |
1 |
|
8 |
0 |
1 |
0 |
1 |
|
9 |
1 |
1 |
0 |
1 |
|
10 |
0 |
0 |
1 |
1 |
|
11 |
1 |
0 |
1 |
1 |
|
12 |
0 |
1 |
1 |
1 |
|
13 |
1 |
1 |
1 |
1 |
Таким образом, каждый триггер уменьшает частоту входного сигнала в 2 раза, а четыре последовательно включенных триггера обеспечивают ее деление на 16. Число, записанное в счетчике и представленное сочетанием логических нулей и единиц на выходах Q, можно определить с помощью уравнения
![]()
где т — номер триггера;![]() -вес соответствующего разряда; Q…Qm — единица или ноль в зависимости от сигнала на соответствующем входе.
-вес соответствующего разряда; Q…Qm — единица или ноль в зависимости от сигнала на соответствующем входе.
Из (9.2) следует, что вес четвертого триггера — 8, третьего — 4, второго — 2, первого — 1. Это иногда отмечают соответствующими цифрами в обозначении на дополнительном поле с правой стороны (рис.1, а).
Так как подсчитываемые импульсы последовательно изменяют состояние триггеров слева направо, причем их состояние меняется в моменты их прихода (по срезу 1,0), то говорят, что это асинхронные счетчики с последовательным переносом.
В течение цикла преобразования числа, записанные в счетчике, увеличиваются при поступлении каждого нового импульса. Поэтому данный счетчик относится к числу суммирующих.
Достоинствами подобного счетчика являются: простота схемы; легкость увеличения разрядности (путем подключения к выходу последнего триггера цепочки из последовательно соединенных триггеров).
Недостатки: сниженное быстродействие из-за того, что триггеры срабатывают последовательно один за другим; возможность появления кратковременных ложных сигналов на выходах дешифраторов, подключенных к счетчику вследствие задержек с переключением отдельных триггеров.
счетчик двоичный микроконтроллер
2. Микроконтроллер в пошаговом режиме работы и в режиме внешнего доступа
Пошаговый режим. Схема запуска и временная диаграмма работы МК в пошаговом режиме показаны на рис.2. Этот режим используется на этапе отладки МК-системы и предоставляет разработчику возможность выполнить прикладную программу покомандно.
Сигнал ¬ШАГ = 0 останавливает работу МК после окончания цикла те кущей команда, после чего МК выдает подтверждающий сигнал САВП = 1.
Для вывода МК из состояния останова необходимо подать сигнал ШАГ = 1 , на который МК откликается генерацией подтверждающего, сигнала САВП = 0. Для того чтобы МК остановился после следующей команды, на вход ¬ШАГ вновь должен быть подан сигнал 0, как только сигнал САВП станет равным нулю. Переход от команды к команде осуществляется по нажатию кнопки ¬ШАГ, устанавливающей буферный D-триггер по входу синхронизации.
Сигнал ¬ШАГ на выходе D-триггера не приобретет значение 1 до тех пор, пока сигнал САВП не будет равен 1 . Так как вход R асинхронного сброса D-триггера эквивалентен трем ТТЛ-нагрузкам, то между выходом САВП и входом сброса D-триггера необходимо установить усилитель.
Режим внешнего доступа. Подача уровня +5 В на вход ОРПП позволяет отключить резидентную память программ МК и осуществлять выборку команд только из внешней памяти. Этот режим работы удобен на этапе отладки МК-системы, так как позволяет пользователю подключать внешнюю память, содержащую или диагностическую программу, или варианты прикладной программы. При помощи этого же сигнала ОРПП с уровнем +25 В возможно выполнить чтение содержимого РПП извне, что необходимо на этапе программирования МК для проверки вводимой информации.
а)
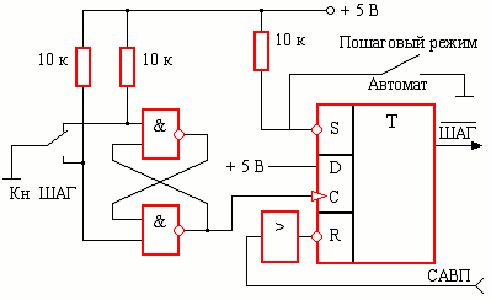
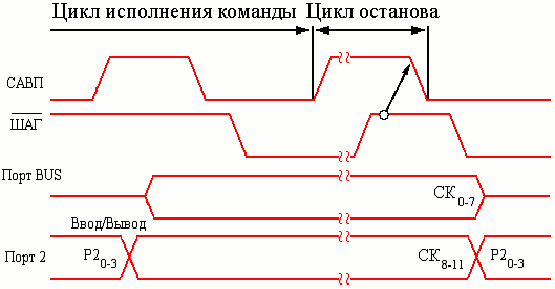
Рис. 2. Схема (а) и временная диаграмма (б) пошагового режима работы МК48
Список литературы
[Электронный ресурс]//URL: https://drprom.ru/referat/mikroprotsessoryi-v-shemah-avtomatiki/
1. Конспект лекций по микропроцессорным устройствам Нефедкиной Г.Ф. за 2008 г.
- Сташин В.В. и др. Проектирование цифровых устройств на однокристальных микроконтроллерах В.В. Сташин, А.В. Урусов, О.Ф. Мологонцева. — М.: Энергоатомиздат, 1990. — 224 с.
- Шило В.Л.
Популярные цифровые микросхемы. Москва. «Радио и связь» 1989г.
- Гусев В.Г., Гусев Ю.М. Электроника и микропроцессорная техника: Учебник для вузов — М.: Высш. шк, 2006.-799с.