
Цели и задачи автоматизации технологических процессов пищевой промышленности
Цель автоматизации — повысить качество, снизить материальные затраты, сократить сроки проектирования и уменьшить количество работников, занятых проектированием. Под автоматизацией проектирования обычно понимают систематическое применение ЭВМ в процессе проектирования при научно обоснованном распределении функций между проектировщиком и ЭВМ и при обоснованном выборе методов машинного решения задач.
Научно обоснованное распределение функций между человеком и ЭВМ подразумевает, что человек должен решать задачи, носящие творческий характер, а ЭВМ — задачи, удовлетворяющие требованиям возможности алгоритмизации и большей эффективности исполнения алгоритма на ЭВМ по сравнению с другим решением.
ЭВМ можно использовать не только как средство проектирования, но и как партнера по выполнению проектной работы. А это меняет многие традиционные представления об организации проектирования. В настоящее время уже ни у кого не вызывает сомнения, что за автоматизацией проектирования большое будущее. Но путь в это будущее лежит через решение многих научных и технических проблем. И не случайно, что автоматизация проектирования стала рассматриваться как новое научное направление. Оно находится на стыке различных научных дисциплин, и в этом его особенность.
Решительное ускорение научно-технического прогресса в проектировании достигается применением систем автоматизированного проектирования (САПР), основными частями которых являются технические средства, общее и специальное программное и математическое обеспечение. К отдельным частям САПР относят информационное обеспечение — банк данных, включающий различного рода справочные каталоги, значения параметров, сведения о типовых решениях и т. п.
В САПР решение задач обеспечивается совокупностью программ общего и специального программного обеспечения, которые разрабатываются специалистами по САПР. Разработанные программы применяют многократно в различных ситуациях, возникающих при проектировании многих объектов. Несмотря на это, знание методов и алгоритмов, реализованных в программах САПР, желательно для пользователя САПР. Эти знания помогут избежать многих ошибок в формулировке задач, назначении исходных данных, интерпретации результатов.
САПР конкретных отраслей имеет свою специфику, однако ряд основополагающих положений САПР имеет достаточно общий характер, например принципы построения общего и специального программного обеспечения, формирование взаимосвязанных типовых задач и программ, организация взаимодействия пользователя и ЭВМ, подходы к получению математических моделей проектируемых объектов и т. д. В развитии автоматизированного проектирования можно выделить несколько стадий.
Системы автоматизированного проектирования САПР строительных и дорожных машин
... -модульный метод проектирования на основе САПР. Он обеспечивает значительное сокращение сроков создания новой техники, повышение степени унификации и взаимозаменяемости элементов. 5.Современное направление развития дорожных машин. Научно-технический прогресс в строительном, дорожном и коммунальном ...
Первая стадия характеризуется использованием ЭВМ в архитектурно-строительном проектировании, когда с помощью частных программ рассчитывали отдельные элементы и части зданий. В то время, в начале 50-х годов, использование ЭВМ для решения проектных задач осуществлялось по известной схеме, применяемой и сейчас во многих случаях решения отдельных, не связанных между собой задач исследовательского характера. Эта схема включает математическую формулировку задачи, выбор численных методов решения, разработку алгоритма, запись программы на алгоритмическом языке, кодирование исходных данных, перфорацию, отладку программы, решение задачи, обработку результатов — построение графиков, таблиц, чертежей и т. п.
Большой объем неавтоматических работ, по своему характеру непривычных для проектирования, требовал специальной подготовки, большого терпения и особой аккуратности, и поэтому применение ЭВМ не могло носить массового характера. Попытки применения ЭВМ для проектирования, как правило, предпринимались в отношении задач, уже имевших четко выраженный расчетный характер. При этом в программах реализовывались отработанные в инженерной практике расчетные методики — методики, ориентированные на ручной режим. Подобное использование ЭВМ не вносило ничего принципиально нового в процесс проектирования и не могло дать качественных сдвигов в совершенствовании этого процесса. Такое использование ЭВМ можно рассматривать лишь как низшую ступень развития автоматизированного проектирования.
Вторая стадия характеризуется разработкой математических моделей, методов и алгоритмов, уже в достаточной степени учитывающих возможности ЭВМ и позволяющих повысить точность, универсальность, степень оптимальности полученных результатов. На этой стадии развития автоматизированного проектирования были проведены работы по алгоритмизации многих задач, которые до этого не имели расчетного характера. Например, задачи изготовления чертежей, проведения трасс, компоновки и размещения элементов в блоках и др. Однако используемые при этом технические средства и программы не были объединены в единую проектирующую систему.
На третьей стадии устранение отдельных недостатков основано на системном подходе к решению проблем проектирования с помощью ЭВМ, т. е. на создании и внедрении систем автоматизированного проектирования, объединяющих технические средства и математическое обеспечение, параметры и характеристики которых выбирают с максимальным учетом особенностей задач инженерного проектирования. В 1960 г. были разработаны «Основные положения автоматизированной системы проектирования объектов строительства» (АСПОС).
В 70-х годах началась аналогичная работа в области сельскохозяйственного строительства и ведущих отраслях народного хозяйства. Для унификации отраслевых систем была разработана «Система автоматизации проектно-конструкторских работ и технологической подготовки производства» (САПР).
В соответствии с межотраслевой технологией АСПОС стала называться «Система автоматизированного проектирования объектов строительства» (САПР-ОС).
В САПР решаются не только отдельные задачи, но и большинство взаимосвязанных между собой задач, причем в отличие от предыдущего уровня развития теперь не требуется при переходе к новой задаче вручную перекомпоновывать данные — результаты решения одной задачи система автоматически представляет в форме, необходимой для использования в другой задаче. САПР состоит из нескольких составных частей, называемых техническим, математическим, программным, лингвистическим, информационным, методическим и организационным обеспечениями, параметры и характеристики которых выбирают с учетом особенностей задач инженерного проектирования.
Проектирование и реализация хранилища данных для анализа бизнес ...
... решений, поэтому компаниям требуется организовать работу с информацией наилучшим образом. Поэтому возникла необходимость в создании специализированных систем хранения данных и дополнительных средств анализа поступающей информации. Система хранения данных состоит из набора программного обеспечения ...
Техническое обеспечение включает в себя технические средства (ЭВМ, периферийное оборудование), с помощью которых решаются задачи проектирования.
Математическое обеспечение представляется математическими моделями, методами и алгоритмами для решения проектных задач.
Программное обеспечение — это совокупность программ для реализации автоматизированного проектирования. Программное обеспечение может быть специальным и общим. Специальное программное обеспечение включает в себя пакеты прикладных программ (ППП), предназначенных для решения конкретных проектных задач. Общее программное обеспечение предназначено для управления вычислительным процессом в САПР и подготовки программ из ППП к исполнению на ЭВМ.
В общее программное обеспечение входят операционные системы ЭВМ, функционирующих в САПР, а также программы, не входящие в состав операционных систем, но выполняющие сходные функции (управление заданиями, данными, редактирование, трансляция и т. п.) в конкретной САПР.
Лингвистическое обеспечение выражается совокупностью языковых средств, используемых в САПР. В лингвистическое обеспечение входят общеизвестные алгоритмические языки, используемые для данной программы САПР, и входные языки, служащие для описания объектов проектирования и заданий на выполнение проектных процедур. Входные языки представляют для использования САПР наибольший интерес, определяя удобства общения инженера с ЭВМ в процессе проектирования.
Информационное обеспечение — совокупность сведений, необходимых для выполнения проектирования. Основную часть информационного обеспечения составляет база данных — информационные массивы, используемые более чем в одной программе проектирования. База данных в процессе проектирования должна пополняться, в ней возможны корректировка содержимого, стирание устаревших и ненужных сведений ит. п. Должна быть обеспечена также защита данных от неправильных изменений. Все перечисленные функции по работе с базой данных обеспечиваются системой управления базой данных (СУБД).
База данных вместе с СУБД называется банком данных.
Методическое и организационное обеспечение представляет собой совокупность документов, устанавливающих состав и правила функционирования средств САПР и подразделений проектного предприятия.
В виду большой сложности и трудоемкости работ по созданию САПР, структура и процесс ее разработки строго регламентированы многочисленными стандартами.
2. Классификация законов регулирования
В системах автоматического регулирования поддержание заданного значения регулируемого параметра или изменение его по определенному закону обеспечивается аппаратурными средствами, имеющие общее название — автоматические регуляторы.
По виду регулируемого параметра автоматические регуляторы подразделяются на регуляторы температуры, давления, влажности, разряжения, расхода, состава и т. п.
Классификация регуляторов
... регулирование и регулятор называют двухпозиционными. В регуляторах такого типа происходит квантование, т.е. преобразование регулирующего воздействия в дискретную величину. ... регулирующего органа через положение, соответствующее равновесному состоянию системы. Это вызывает колебательный режим работы регулятора и динамическую ошибку регулирования. регулятора непрямого действия На работу регулятора ...
По характеру изменения регулирующего воздействия автоматические регуляторы подразделяются на регуляторы с линейными и нелинейными законами регулирования.
Примером регуляторов с нелинейным законом регулирования могут служить двухпозиционные регуляторы температуры в холодильных машинах. В трехпозиционных дискретных системах выходной сигнал может принимать три значения: -1, 0, +1, т.е. “меньше”, “норма”, больше”. Качество работы таких САР выше, хотя их надежность ниже.
Кроме органов настройки основных параметров, регуляторы имеют также органы настройки, косвенно влияющие на эти коэффициенты или режимы его работы, например, органы настройки, изменяющие чувствительность регулятора, демпфирование входного сигнала и др.
Закон регулирования — это математическая зависимость, с помощью которого определяется регулирующее воздействие по сигналу рассогласования.
Регуляторы с линейным законом регулирования по математической зависимости между входными и выходными сигналами подразделяются
- пропорциональные (Регуляторы);
- пропорционально-интегральные (ПИ-регуляторы);
- пропорционально-интегрально-дифференциальные (ПИД-регуляторы).
Обобщенная структурная схема САР представлена на рис. 2.1.

а — разомкнутая система по каналу задающего воздействия;
- б — замкнутая система по каналу задающего воздействия;
- Рисунок 2.1- Структурная схема САР
Для системы регулирования, показанной на рисунке 2.1,(а), ее амплитудно-фазовая характеристика (АФХ) определяется выражением
W(jω) = Wp(jω) · Wоб(jω), (2.1)
где Wp(jω) — АФХ регулятора; об(jω) — АФХ объекта регулирования.
Если комплексная частотная характеристика регулятора будет
Wp(jω) = kp, (2.2)
то АФХ всей системы запишется в виде
W (jω) = kp · Wоб(jω).
(2.3)
Следовательно, при подключении к объекту регулятора с АФХ (2.2) АФХ системы на каждой частоте увеличивается в kp раз.
Такие регуляторы называются пропорциональными (П-регуляторы) и имеют один параметр настройки — коэффициент передачи kp.
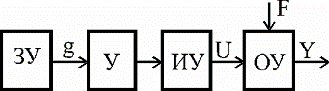
Переходные процессы в П-регуляторе описываются выражением
μ = kp · ε, (2.4)
где ε — входное воздействие на регулятор, равное отклонению регулируемой величины от заданного значения;
- μ — воздействие регулятора на объект, направленное на ликвидацию отклонения регулируемой величины от заданного значения.
Статическую ошибку, возникающую при пропорциональном регулировании, можно исключить, если кроме пропорционального ввести еще и интегральное звено. Последнее образуется путем постоянного суммирования ε за определенный промежуток времени и формирования сигнала управления, пропорционального полученной величине.
Математически этот процесс может быть описан
 (2.5)
(2.5)
Право в системе социальных регуляторов
... взаимоотношении друг с другом. [11;123]. Глава 2. Социальные нормы как регуляторы право поведение государство социальный 2.1 Понятие и классификация социальных норм Для того, чтобы человек мог жить в ... норм, которые их регулируют. В своей совокупности существующие нормы представляют единую систему социального регулирования, в которой эффективность каждого вида норм наибольшей мерой оказывается только ...
где k и =1/Ти — коэффициент пропорциональности интегральной составляющей, а Ти — постоянная времени интегрирования, параметр настройки регулятора.
Если kи ≠ 0, то даже при незначительных отклонениях регулируемой величины сигнал со временем может достичь любой величины, что приведет к перемещению регулирующего органа до момента, пока ε не станет равным 0.
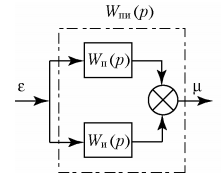
Рисунок 2.2 — Структурная схема идеального ПИ- регулятора
Передаточная функция ПИ-регулятора (по схеме, рис. 2.2):
 (2.6)
(2.6)
При скачкообразном изменении регулируемой величины на значение ε 0 ПИ-регулятор со скоростью, определяемой быстродействием привода, перемещает исполнительный механизм на величину (kp·ε0 ), после чего исполнительный механизм дополнительно перемещается в ту же сторону со скоростью ε0 /Ти, пропорциональной отклонению регулируемой величины. Следовательно, в ПИ-регуляторе при отклонении регулируемой величины от заданного значения мгновенно срабатывает пропорциональная (статическая) составляющая регулятора, а затем постепенно увеличивается интегральная (астатическая) составляющая регулятора.
П- и ПИ-регуляторы не могут упреждать ожидаемое отклонение регулируемой величины, реагируя только на уже имеющееся отклонение.
Возникает необходимость в регуляторе, который вырабатывал бы дополнительное регулирующее воздействие, пропорциональное скорости отклонения регулируемой величины от заданного значения
 (2.7)
(2.7)
Такое регулирующее воздействие используется в дифференциальных и ПИД-регуляторах. ПИД-регуляторы воздействуют на объект пропорционально отклонению ε регулируемой величины, интегралу от этого отклонения и скорости изменения регулируемой величины:
 (2.8)
(2.8)
По возможностям ПИД-регуляторы являются универсальными. Используя их, можно получить любой закон регулирования. Структурная схема и закон регулирования идеального ПИД-регулятора приведены на рис. 2.3.
Рисунок 2.3 — Cтруктурная схема ПИД-регулятора (а) и закон ПИД-регулирования (б)
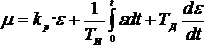
При скачкообразном изменении регулируемой величины ПИД-регулятор в начальный момент времени оказывает мгновенное бесконечно большое воздействие на объект регулирования, затем величина воздействия резко падает до значения, определяемого пропорциональной составляющей, после чего постепенно начинает оказывать влияние интегральная составляющая регулятора. Переходной процесс при этом (рис. 2.4) имеет минимальные отклонения по амплитуде и по времени.
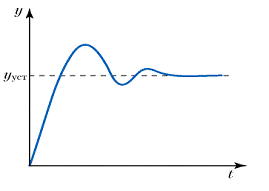
Рисунок 2.4 -Переходной процесс при ПИД- регулировании
Параметрами настройки ПИД-регуляторов являются коэффициент пропорциональности регулятора kp, постоянная времени интегрирования Ти и постоянная времени дифференцирования Тд.
Управление электроэнергетической системой
... (уравнений), описывающих процесс функционирования объекта управления (ОУ) с учетом воздействий управления и воздействий окружающей среды. Составим уравнения динамики системы, приведенной на рисунке 1. Выражения, ... постоянная инерции эквивалентного агрегата; К н - коэффициент, определяющий регулирующий эффект нагрузки; S c - статизм первичных регуляторов турбин. Величины параметров : Т с = 0.3 [с ]; ...
Разомкнутые и замкнутые автоматические системы регулирования
При изображении систем управления применяют два принципа — функциональный и структурный принцип и соответственно схемы подразделяются на функциональные и структурные схемы.
Разомкнутые системы автоматического регулирования
Системы управления разделяются на разомкнутые и замкнутые системы. Управление по разомкнутому циклу осуществляется без контроля результата.
ЗУ — задающее устройство;
- У — усилитель;
- ИУ — исполнительное устройство;
— задающее воздействие;
— управляющее воздействие;
— выходная величина;
— возмущающее воздействие;
- ОУ- объект управления.
Рисунок 3.1 — Функциональная схема разомкнутой САР
Такое управление называется жестким. Разомкнутые системы применяются для стабилизации и программного управления.
Задающее устройство вырабатывает задающее воздействие , в соответствии, с которым устанавливается управляющее воздействие . Управляющим называется воздействие, которое вырабатывает исполнительное устройство (исполнительный элемент).
Это воздействие поступает на объект управления и определяет значение выходной величины. На объект управления кроме управляющего всегда действует другое воздействие, называемое возмущающим. Возмущающих воздействий может быть несколько.
Возмущающее воздействие нарушает связь между управляющим воздействием и выходной величиной объекта. При постоянном задающем воздействии изменение возмущающего воздействия вызывает изменение выходной величины . Большинство устройств систем управления являются инерционными.
Системы автоматического управления по возмущению (системы компенсации)
Разомкнутые системы с управлением по возмущению характерны тем, что управляющий сигнал формируется в зависимости от величины основного возмущающего воздействия. Эти системы предназначены для уменьшения влияния возмущающего воздействия на выходную величину объекта управления путем измерения самого этого воздействия и компенсации его влияния за счет искусственного воздействия на процесс.
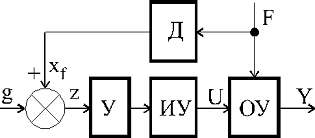
У — усилитель;
- ИУ — исполнительное устройство;
— задающее воздействие;
— управляющее воздействие;
— выходная величина;
— возмущающее воздействие.
Д — датчик возмущающего воздействия;
- ОУ- объект управления;
— сигнал пропорциональный возмущающему воздействию;
— сигнал на входе усилителя.
Рисунок 3.2 — Функциональная схема САР по возмущению
Классификация систем автоматического управления и регулирования. ...
... главных признаков является метод управления, по которому САУ подразделяются на системы, неприспосабливающиеся к изменяющимся условиям работы объекта регулирования и приспосабливающиеся (или адаптивные) системы. Рис. 1.7. Классификация систем автоматического управления и регулирования Неприспосабливающиеся САУ — это ...
В рассматриваемой системе ![]() . Можно считать, что сигнал связан с возмущающим воздействием соотношением
. Можно считать, что сигнал связан с возмущающим воздействием соотношением ![]() , где
, где ![]() — коэффициент передачи датчика.
— коэффициент передачи датчика.
В системах управления по возмущению можно добиться полной компенсации влияния возмущающего воздействия на выходную величину в установившемся режиме работы.
Эти системы должны быстро реагировать на меняющееся возмущающее воздействие, так как изменение сигнала на выходе усилителя происходит одновременно с изменением возмущающего воздействия.
В системах управления на объект действует несколько возмущающих воздействий. Те возмущения, которые не измеряются, будут вызывать изменение выходной величины.
Замкнутые системы автоматического регулирования
В замкнутых САР управляющее воздействие формируется в непосредственной зависимости от управляемой величины .
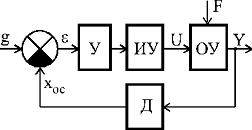
У — усилитель;
- ИУ — исполнительное устройство;
— управляющее воздействие;
— выходная величина;
— возмущающее воздействие.
Д — датчик возмущающего воздействия;
- ОУ- объект управления;
— задающее воздействие;
— сигнал обратной связи;
— отклонение сигнала обратной связи от задающего
воздействия
Рисунок 3.3 — Функциональная схема замкнутой САР
В замкнутой системе сигнал с выхода датчика Д, измеряющего выходную величину, поступает на вход системы. Такая связь входа системы с его выходом называется обратной связью.
Сигнал на входе усилителя равен .
Если из задающего воздействия вычитать выходную величину , то будет представлять отклонение регулируемой величины от заданного значения.
В замкнутой системе управляющее воздействие формируется в функции отклонения . Замкнутые системы называются системами автоматического регулирования по отклонению.
4 Управляющие функции АСУТП
Назначение АСУ ТП заключается в целенаправленном ведении ТП и обеспечении информацией смежных и вышестоящих органов и систем управления.
Цель управления математически формулируется обычно в виде критерия управления и часто сводится к получению максимального экономического эффекта с учетом плановых, экономических и технических ограничений. В частном случае это может быть максимальная производительность, минимальная стоимость, минимальный расход дорогого сырья и т. д.
Практически цель управления реализуется путем стабилизации параметров процесса на входе и заданных параметров готовой продукции, оптимизации и согласования режимов работы агрегатов, обеспечения безопасности функционирования ТП.
Функции АСУ ТП направлены на выполнение поставленных частных целей управления и выполняются комплексом технических средств (КТС) и персоналом.
Переходная функция системы управления. Импульсная характеристика. ...
... систем, эффективным средством как при проектировании САУ, так и при реализации управляющих воздействий в них. Как показывает анализ, для записи передаточных функций в изображениях по Лапласу в теории автоматического управления ... единице [5]: (3.2) Переход к передаточной функции стандартатной формы делает возможным получение модели, в которой параметры передаточной функции К и Т - коэффициенты, имеют ...
Информационные функции обеспечивают контроль основных параметров процесса и сигнализацию об отклонении от этих параметров; измерение и регистрацию по вызову; запросы оператора; вычисление ТЭП, показателей качества продукции и процесса; периодическую регистрацию и др. Совокупность информационных функций составляет информационную подсистему АСУ ТП.
Управляющие функции обеспечивают выработку и реализацию управляющих воздействий на объект управления, стабилизацию параметров, программное изменение режима, защиту, формирование и реализацию оптимальных управляющих воздействий, распределение нагрузок между агрегатами, управление пусками и остановами агрегатов.
§ автоматическое управление отдельными агрегатами и регулирование отдельных параметров;
- § защита и блокировка технологического оборудование в случае отклонения текущих параметров от установленных значений;
- § дистанционное управление технологическим оборудованием с клавиатуры ПЭВМ (включить\выключить, открыть\закрыть).
Совокупность управляющих функций составляет управляющую подсистему АСУ ТП (рис.4.1).
Кроме вышеперечисленных основных (внешних) функций имеются служебные (внутренние) функции АСУ ТП: контроль за правильностью функционирования, связь с АСУ более высокого уровня, слежение за астрономическим временем и отсчет временных интервалов.
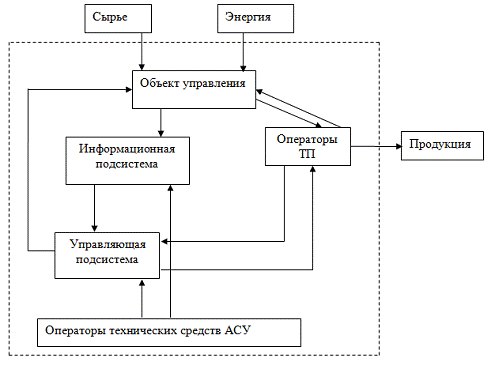
Рисунок 4.1- Обобщенная функционально-информационная
автоматизация регулятор настройка
Список использованных источников
[Электронный ресурс]//URL: https://drprom.ru/referat/avtomaticheskoe-regulirovanie-tehnologicheskih-protsessov/
1 Хасанов З.М., Макулов И.А. Системы управления и регулирования автоматизированного электропривода — Уфа: БГАУ, 2004. — 180 с.
2 Коновалов Б.И. Теория автоматического управления: Учебное пособие. — Томск: Томский межвузовский центр дистанционного образования, 2000. — 99 с.
Шиянова Н. И. Теория автоматического управления: Курс лекций. -Мелеуз, филиал ГО У B1IO «МГУТУ», 2009. — 98 с.
Бесекерский В.А., Попов Е.П. «Теория систем автоматического управления. — 4-е изд., перераб. и доп. — СПб.: Профессия, 2003. — 747 с.
Первозванский А.А. Курс теории автоматического управления. М., Наука, 1986
Втюрин В.А. Автоматизированные системы управления технологическими процессами. Основы АСУТП. Учебное пособие для студентов специальности 220301. — Санкт-Петербург 2006.