
Люди всегда стремились улучшить свою жизнь и увеличить свои возможности. Поэтому люди мечтали изобрести различные инструменты, механизмы, машины с целью облегчения своего труда, повышения качества и производительности. Причем данные мечты появились задолго до того, как общество получило первые представления о точных науках.
Робототехника представляет собой естественное логическое продолжение техники как явления. Сейчас роботы постепенно вытесняют человека из многих сфер его деятельности, предоставляя взамен все новые возможности для приложения усилий: просмотр кинофильмов, подводные погружения, компьютерные игры и т.д. Часть всеобщего труда, затрачиваемая человечеством на производство средств производства, а не конечного продукта потребления, постепенно увеличивается от 0%, очевидно стремясь к 100%.
Робототехника на сегодняшний день является интенсивно развивающейся научно-технической дисциплиной, изучающей как теорию, методы расчета и конструирования роботов, их систем и элементов, так и проблемы комплексной автоматизации производства (Уже сейчас усилия большинства наилучших современных роботов направлены на производство других машин: станков, автомобилей, компьютеров) и научных исследований с применением роботов. Предметом робототехники является создание и применение роботов, других средств робототехники и основанных на них технических систем и комплексов различного назначения.
Поэтому:
Цель данного реферата:
Рассмотреть развитие робототехники в соотношении с историей всего человечества, узнать, как развивалась и зарождалась данная наука и что она представляет собой на данный момент.
Задачи данной работы:
- Рассмотреть и уточнить такие понятия как «Робот», «Андроид», «Машина», «Механизм» и «Робототехника».
- Проследить историю развития роботов, рассмотреть основных ученых в данной сфере и их изобретения.
- Применение роботов в наше время и планы на будущее в этой сфере.
1.
Термины «Механизм», «Машина», «Робот», «Андроид», «Робототехниика»
Перед началом работы необходимо уточнить и правильно разобрать понятия, с которыми мы будем встречаться данной работе, и которые просто необходимы, чтобы при освещении данной темы вся информация имела доступный и понятный смысл.
Механизм — это непосредственное использование материалов для обеспечения некоторой механической функции; при этом все основано на взаимном сцеплении и сопротивлении тел.
Роботы и робототехника в 21 веке
... Айзек Азимов сформулировал три закона робототехники, которые надолго определили наши представления о роботах: Робот не может причинить вред человеку ... который ассоциируется с терминами «робот» и «робототехника». Стремительные темпы развития промышленной роб ... рентгеновских снимков и т. п.). В этой области робототехника соприкасается с телехирургией, удалёнными операциями, выполняемыми человеком ...
Машина — это совокупность механизмов, заменяющих человека или животное в определенной области; преобразует энергию из одного вида в другие (в основном, в тепловую энергию).
Но, как отмечает Марвин Минский — американский ученый в области искусственного интеллекта, термин «машина» имеет отношение не столько к совокупностям, сколько к тому, для чего это совокупность используется, — а используется она главным образом для автоматизации труда.
Робот — понятие неопределенное, к которому можно отнести любой вид машины; термин обычно используется для художественного эффекта или означает, что в машине используются определенные манипуляторные механизмы, позволяющие машине манипулировать (управлять) предметами. Важным свойством роботов является определенная степень автономности.
Андроид — это робот-гуманоид, т.е. антропоморфная, имитирующая человека машина, стремящаяся заменить человека в любой его деятельности. Андроид обязан выглядеть и вести себя как человек.
Робототехника — прикладная наука, занимающаяся разработкой автоматизированных технических систем. Робототехника опирается на такие дисциплины как электроника, механика, программирование. Выделяют строительную, промышленную, бытовую, авиационную и экстремальную (военную, космическую, подводную) робототехнику.
История робототехники
1 Древние времена
Как уже было сказано, люди с древних времен мечтали создать механизмы, которые выполняли бы определенную работу и значительно облегчили бы их жизнь. На это указывают многочисленные мифы и легенды. Древние люди присваивали богам то, что казалось для них фантастикой и то, чем хотели бы обладать сами.
Самый известный миф (3 век до н.э.) — древнегреческий, повествующий о создании богом огня Гефестом двух рабынь из золота, прислуживающих ему, а также золотых треножников, выполнявших простейшие команды типа: принести, подать, унести. Позднее Гефест строит бронзового гиганта Талуса для охраны острова Крит от вражеских нашествий. Но есть и другие легенды, в которых Талос имеет иное происхождение. Множество деталей, присутствующих в мифах и легендах, косвенно указывают на то, что, скорее всего, Талос был первым в истории управляемым роботом. Сторонники этой теории подсчитали, что если бронзовый великан обходил Крит за день (согласно мифам), то он должен был перемещаться со средней скоростью 155 миль в час (ок. 250 км/ч).
Приверженцы гипотезы «палеокибернетики» предполагают, что при ранении Талоса в лодыжку (по мифам самое уязвимое место гиганта), вместо крови вытекала жидкость, похожая на расплавленный свинец.
В середине III тыс. до н.э. египтяне изобрели идею думающих машин: внутри статуй прятались жрецы, чтобы давать предсказания и советы.
В работах Платона (5 век до н.э.) выражаются идеи, имеющие отношение к человеческому мышлению и механике машин.
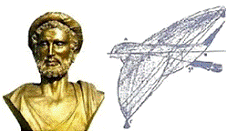
Блестящий философ и математик Архит из Тарентума (350 г. до н.э.), друг Платона, конструирует деревянного голубя, который мог летать за счёт переменных воздушных потоков и управлялся струей пара. Античная традиция приписывает Архиту первый теоретический труд по механике.
Робота зі скаргами незадоволених клієнтів
... Internet 21 4. Система роботи зі скаргами у мережі готелів Promus. 22 5. Система обслуговування клієнтів в Microsoft 23 6. ... в базах даних (якщо існують), а проблеми пов'язані зі скаргами, залишаються поза увагою менеджерів по маркетингові та торгового персоналу ... їх лояльність. Серед, хто скаржиться і вимагає компенсації, переважають люди досить молоді, з рівнем доходів населення і освітою ...
В 3 веке до н. э. римский поэт Клавдий упоминал об автомате, изготовленном Архимедом. Он имел форму стеклянного шара с изображением небесного свода, на котором воспроизводилось движение всех известных в то время небесных светил. Шар приводился в движение водой. А греческий изобретатель и физик Ктесибий из Александрии сконструировал водяные часы. Это был первый автомат для точного хронометрирования.
В книге «Пневматика» Герон Александрийский (I век н.э.) описывает подобные и многие другие автоматы древности. В качестве источника энергии в них использовались вода, пар, гравитация (гири).
В «Театре автоматов» описано даже устройство целого театра, представление в котором разыгрывали фигурки-куклы, приводимые в движение с помощью системы зубчатых колес, блоков и рычагов.
2 Средние века
В средние века большой популярностью пользовались различного рода автоматы, основанные на использовании часовых механизмов. Были созданы всевозможные часы с движущимися фигурами людей, ангелов и т.п.
Механик араб ал-Джазари (1206) в «Книге о познании хитроумных механических приспособлений» объясняет принципы устройства разных автоматов.
К этому периоду относятся сведения о создании первых подвижных человекоподобных механических фигур — андроидов.
Так, андроид алхимика Альберта Великого (1193-1280) представлял собой куклу в рост человека, которая, когда стучали в дверь, открывала и закрывала ее, кланяясь при этом входящему. В 13 веке Альберт Великий создал автомат, ставший впоследствии известным как «говорящая голова», способный воспроизводить человеческий голос.
В 1495 году Леонардо да Винчи разработал детальный проект механического человека, способного двигать руками и поворачивать голову (а возможно собрал и испытал).
Механизм выглядит как бронированный рыцарь, облачённый в броню, по видимости являющегося первым антропоморфным роботом.
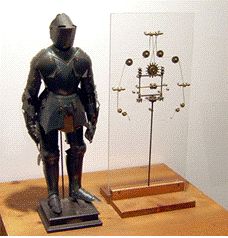
Внутри доспехов находился механизм, приводящий в движение искусственного человека при помощи тросов и роликов, создавая иллюзию, что там внутри есть живой человек. Рыцарь-робот умел садиться, двигать головой и руками, анатомически правильно открывать и закрывать рот. Также, он мог имитировать звуки — шёл под сопровождение автоматических барабанов.

Чертежи художника свидетельствуют о том, что все части устройства имели достаточную координацию: контроль над ними осуществлялся за счёт механического устройства управления программируемого способом прямого кодирования и расположенного в грудной клетке робота, а ноги приводились в движение отдельно, посредством внешней рукоятки, натягивающей трос, соединённый с важнейшими звеньями в лодыжке, колене, бедре.
Робот-Рыцарь Да Винчи «одевался» в доспехи, характерные для Германии и Италии в конце XV в.
Ганс Бульман (1525) в Нюрнберге строит первого реального андроида. Считают, что было создано несколько полностью завершенных механизмов, в том числе андроиды, играющие на музыкальных инструментах.
Иоганн Мюллер (1533), прозванный Региомонтанусом, в Нюрнберге создает железную муху и искусственного орла, оба из которых могли подниматься в воздух. Предполагается, что механизмы имели паровую тягу.
Часы. Закон четвертого измерения
... относящиеся к X веку. Изобретение механических часов приписывают Римскому Папе Сильвестру II ... человек, в том числе адмирал, герой Англо-французской войны, погибли. Эта трагедия стала для Британии страшным потрясением. Вскоре парламент подготовил билль, согласно которому беспрецедентно огромная по тем ... отводилась скромная роль средства измерения скорости движения, не более того, поскольку ...
Джианелло Ториано (1540) из Кремоны конструирует андроида в виде женщины, играющей на лютне.
Джон Ди (1543) в Англии создает деревянного жука, способного летать.
Амбруаз Паре (1564), издает «Dix livres de chirurgie», в которой описывает проект механической руки. Рука во всем схожа с человеческой и имеет механические «мускулы».
2.3 17-18 век
Шотландский лорд Джон Непер (1617) создает приспособление для выполнения простейших вычислений.
Базируясь на работах Непера, профессор университета немецкого города Тюбинген, Вильгельм Шиккард (1623), разрабатывает счетную машину для сложения, вычитания, а также табличного умножения и деления шестиразрядных десятичных чисел. В письме к Кеплеру он приводит рисунок машины и рассказывает, как она устроена.

Во Франции Блез Паскаль (1642) описывает механическую машину для суммирования и вычитания чисел.
В 1694 Лейбниц совершенствует машину Паскаля, добавив в нее возможность производить умножение и деление.
В замке Хейлбрунн (1725) в Германии создан механический театр. Представление из жизни деревни разыгрывается с помощью 119 персонажей под аккомпанемент органа.
Немецкий философ и алхимик Албертус Магнус (1727) пытается создать искусственных существ.
Работы по созданию андроидов достигли наибольшего развития в XVIII в. Одновременно с расцветом часового мастерства.
Французский механик и изобретатель Жак де Вокансон создал в 1738 году первое работающее человекоподобное устройство (андроид), которое играло на флейте. «Флейтист» был ростом с человека. Подвижными пальцами он мог исполнять 11 мелодий с помощью заложенной в него программы.
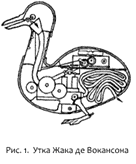
Вокансон также создал механическую утку, покрытую настоящими перьями, которая могла ходить, двигать крыльями, крякать, пить воду, клевать зерно и, перемалывая его маленькой внутренней мельницей, отправлять нужду на пол. Утка состояла из более чем 400 движущихся деталей и была однозначно признана венцом творения мастера.
Немецкий изобретатель Фридрих фон Кнаус (1760) создает андроида, способного держать перо и писать 107 различных слов.
В России (1770) создается одно из первых механических вычислительных устройств — машина Якобсона.
Созданием автоматов также занимались швейцарские часовщики Пьер-Жак Дро (1721-1790) и его сын Анри Дро (1752-1791).
От имени последнего позднее было образовано и понятие «андроид».
Одно из первых своих изделий — замечательные маятниковые часы с пастушком и собачкой — Дро повез в столицу Испании город Мадрид к королю Фердинанду IV. Демонстрация производилась в присутствии многочисленной придворной знати. Возбужденный Дро показал им созданное произведение. Когда часовая стрелка подходила к какому-либо часу, пастушок подносил ко рту флейту и свистел столько раз, сколько должно было пробить часов. У ног пастушка лежала собачка, охранявшая корзинку с яблоками. Стоило кому-нибудь из придворных дотронуться до фруктов, как собачка начинала лаять. Сняли руку с фруктов — лай тут же прекращался. Королю понравилось изобретение Пьера Дро, и он, хорошо заплатив, купил часы.
История часов и часы в истории
... создавала благоприятные условия как для астрономических наблюдений, так и для использования гномонов и солнечных часов для измерения времени. ... время имели в быту и на кораблях песочные часы, которые стали использоваться для регулирования смены вахт. Начали создаваться сложного устройства водяные часы, часто с использованием средств механики, применявшихся тогда для устройства механических часов. ...
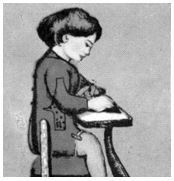
Пьер-Жак Дро начал создавать после такого успеха различные автоматы, из которых наибольшую известность получили писец и художник. Писец (1770) мальчика. Он был ростом с пятилетнего ребенка. Он сидел на скамейке перед столиком, а весь приводной механизм размещался внутри куклы, отчего она выглядела еще изящнее. В правой руке маленького механического человека было гусиное перо (в те времена стальных перьев еще не знали).
Писец макал перо в стоящую перед ним чернильницу и писал разные слова и даже фразы без всякого участия человека.

Буквы были крупные, красивые, даже с нажимом и располагались в ровные строчки. Между словами оставлялись промежутки. Здесь на французском языке написано: «Своему родному городу. Жак Дро».
Когда механический человек писал, он двигал головой, и казалось, следил за тем, что пишет. Окончив работу, писец посыпал лист бумаги песком для высушивания чернил, а потом стряхивал его. По чистой случайности «пишущий мальчик» и часть его «рукописей», а также и другие изобретения отца и сына Дро сохранились до наших дней.
За работой над изготовлением «пишущего мальчика» наблюдал шестнадцатилетний сын Пьера Дро — Анри. Мальчик унаследовал от отца исключительную способность к механике и через три года сам принялся за постройку нового механического человека, который по замыслу должен был рисовать. По размеру рисовальщик был таким же, как и его «старший брат». В правой руке он держал карандаш и рисовал различные фигурки, а также писал. Например, он мог изобразить маленькую собачонку и подписать под рисунком «мой Туту». А портреты Людовиков XV и XVI и Марии Антуанетты и сейчас приводят в восхищение посетителей музея в Невшателе. В процессе работы рисовальщик останавливался, как бы созерцая нарисованное, а также иногда сдувал с листа бумаги соринки.
Спустя некоторое время оба механика, отец и сын Дро, занялись вместе изобретением и постройкой третьего механического человека — музыкантши. По сложности она намного превосходила своих «братьев». Эта кукла играла на фисгармонии, ударяя пальцами по клавишам. Четко и легко удавались ей трели и быстрые пассажи.

Перед началом игры музыкантша осматривала ноты и делала рукой некоторые предварительные движения. Кроме того, она поворачивала голову и глаза, как бы следя за положением рук. Ее грудь подымалась и опускалась, как будто она дышала. Окончив игру, музыкантша наклоняла голову, благодаря слушателей за одобрение. Сохранилось восторженное описание этой фигуры современником: «Девушка играет, шевелит губами, грудь ее поднимается и опускается при «дыхании», она смотрит на клавиши, в ноты, а иногда бросает взгляд на публику, по окончании «номера» встает и кланяется». Источником движения всех трех описанных автоматов является часовой механизм с заводной пружиной. Пружина приводит в действие сложнейшие системы зубчатых колес, рычажков, штанг и кулачков — все то, что в дальнейшем стали называть программным механизмом. Эти человекоподобные игрушки представляли собой многопрограммные автоматы с оперативно сменяемыми программами.
Робота з таблицями у Word
... на границях таблиці, то за допомогою клавіш можна вийти з таблиці Якщо натиснenb клавішу < Таb >, коли ... комірках або утримуючи натиснуту клавішу <Shift >, натиснути одну з клавіш управління курсором. Крім того, можна використовувати швидкі клавіші, ... видалення комірок Для того щоб видалити рядки, стовпці чи комірки з таблиці, спочатку варто виділити комірки, а потім виконати команду ...
Не остались в стороне и русские механики. Однако их конструкции отличались простотой конструкции. Так, механик И.П. Кулибин (1790) построил в течение трех лет яичную фигуру — универсальные часы.

Часы давали театрализованное представление и играли музыку. В этих часах было три самостоятельных механизма и три завода: часовой, боевой и курантовый, а также автоматические приборы для приведения в действие механизмов, воспроизводящих сцены, музыку и бой. Как свидетельствует сохранившаяся опись частей, составленная Кулибиным, часы яичной фигуры состояли из 427 деталей. Все они были изготовлены исключительно точно и тонко.
4 19 век
Жозеф Мари Жаккард (1801) создает автоматический ткацкий станок, управляемый при посредстве перфокарт. Наличие или отсутствие отверстий в перфокарте заставляло нить подниматься или опускаться при ходе челнока, создавая тем самым запрограммированный рисунок. Станок Жаккарда был первым массовым промышленным устройством, автоматически работающим по заданной программе.
Фридрих Кауфман (1810) конструирует механического трубача. В трубаче используется шаговый программный барабан.
Мэри Шелли (1818) пишет первый научно-фантастический роман «Франкенштейн, или Современный Прометей». В романе впервые появляется жутковатая идея использования электричества для оживления мертвой материи. Идея создания андроидов, которые основаны на ранее живой ткани ужаснула многих читателей и привлекла многих ученых, как возможность новых открытий и экспериментов.
Майкл Фарадей (1821) сообщает о своем открытии электромагнитного вращения и создает первые модели электродвигателей.
В 1827 г. В Санкт-Петербурге демонстрировался «Храм очарований или механический, физический и оптический кабинеты». Чудеса начинались с лестницы — искусственная женщина начинает играть на валторне, если кто-то заходит на площадку. У входа в зал кланялись механические слуги. Если кто-то садился на диван — слуга-автомат выносил поднос с напитками.
В 1833 г. Чарльз Бэббидж разрабатывает принципы «Аналитической машины» («Analytical Engine») — механического прототипа появившихся спустя столетие ЭВМ. В проекте Бэббиджа были предусмотрены все основные компоненты, имеющиеся в современном компьютере: устройство для хранения цифровой информации (память); устройство, выполняющее операции над числами (арифметическое устройство); устройство для управления обработкой (устройство управления); устройства ввода с перфокарт, с которых считывались программа и данные, подлежащие обработке. Машина Бэббиджа была задумана как чисто механическое устройство с возможным приводом от парового двигателя, но содержала ряд фундаментальных идей. В число операций была включена операция условного перехода и операции с кодами команд. Присутствовал также и прообраз микропрограммирования — значение инструкций задавалось с помощью позиционирования металлических штырей в цилиндре с отверстиями, который назывался «контрольный цилиндр».
Роль роботов в жизни человека
... исследователем. Впервые слово «робот» прозвучало в его пьесе «R. U.R.» (1920 год), в ней роботами именовались синтетические люди-слуги немеханической природы. Ромбот (чеш. robot, от robota — «подневольный труд») — автоматическое устройство, созданное ...
В 1843 г., Августа Ада Лавлейс, публикует свои комментарии к статье Луи Фредерико Менабреа «Очерк аналитической машины, изобретенной Ч.Бэббиджем». Составленные 28-летней графиней примечания к статье итальянского инженера навсегда вписали её имя в историю науки. По существу, Ада Лавлейс заложила научные основы программирования на вычислительных машинах за столетие до того, как стала развиваться эта научная дисциплина. Ряд высказанных Лавлейс общих положений (принцип экономии рабочих ячеек, связь рекуррентных формул с циклическими процессами вычислений и др.) сохранил свое принципиальное значение и для современного программирования, а её определение «цикла» почти дословно совпадает с приводящимся в современных учебниках программирования. В память о ней назван разработанный в 1980 году крупнейшими специалистами по программированию язык АДА — один из наиболее универсальных алгоритмических языков.
Петербургским учителем музыки Куммером в 1846 предложено механическое устройство для автоматизации вычислений (счислитель Куммера), серийно выпускавшееся (с различными модификациями) вплоть до 70-х годов XX в.
Джонни Брейнерд (1865), одарённый конструктор, строит Парового Человека. Механизм Брейнерда был приблизительно трёхметрового роста, ни одна лошадь не могла сравниться с ним: гигант с лёгкостью тянул фургон с пятью пассажирами. Там, где обычные люди носят шляпу, у Парового Человека была труба дымохода, откуда валил густой чёрный дым. Паровой Человек мог двигаться со скоростью до 30 миль в час (около 50 км/час).

г. На Всемирной выставке в Париже представлена стопоходящая машина академика Пафнутия Львовича Чебышева. Механизм Чебышева явился первой попыткой создания транспортного средства шагающего типа и положил начало конструированию шагающих устройств на основе траекторного синтеза.
Проходят первые испытания Электрического Человека (1885) Фрэнка Рида. У машины был довольно мощный прожектор, а противников ожидали электрические разряды, которыми Человек стрелял прямо из глаз. Судя по всему, источник питания находился в закрытом сеткой фургоне. О способностях Электрического Человека и о его скорости ничего не известно.
Профессором Арчи Кемпионом (1893) на Международной колумбийской выставке представлен опытный образец робота Boilerplate. Boilerplate был задуман как средство бескровного решения конфликтов — иными словами, это был опытный образец механического солдата. Робот существовал в единственном экземпляре, но у него была возможность осуществить предложенную функцию — Boilerplate неоднократно участвовал в боевых действиях.
мая 1895г. Александр Степанович Попов впервые в мире сделал научный доклад об изобретенном им методе использования излученных электромагнитных волн для беспроводной передачи электрических сигналов.
В 1898 г. Никола Тесла (Nicola Tesla) демонстрирует первый дистанционно управляемый механизм на выставке в Madison Square Garden в Нью-Йорке.
июня 1898 года механический солдат Boilerplate Арчи Кемпиона впервые участвует в бою, во время атаки обратив противника в бегство.
Транспортный робот
... было бы использовать в практике: например, лесная машина фирма “Табержек”, робот лаборатории транспортных систем АН СССР. Эти машины не оправдали надежды конструкторов и не показали динамических ... систем, то видно, что их мобильность значительно выше, чем у созданных человеком транспортных средств. Человек, совершенствуя природу на базе создания комбинированных шагающих механизмов с другими типами ...
5 1900-1939
Луи Филип Перью (1900) в Америке создает Автоматического Человека (Automatic Man).
«Этот гигант из дерева, каучука и металлов, который ходит, бегает, прыгает, разговаривает и закатывает глаза — практически во всём в точности подражает человеку». Автоматический Человек был ростом 7 футов 5 дюймов (2,25 метра), одет был в белый костюм, носил гигантскую обувь и соответствующую шляпу.
Ли де Форест (1906) патентует вакуумный триод, использовавшийся в качестве переключателя в первых электронных компьютерах
В 1918 г. Михаил Александрович Бонч-Бруевич изобретает ламповый триггер. Триггер способен хранить одну двоичную цифру. Это изобретение закладывает фундамент электронных цифровых компьютеров. Французы Абрахам и Блох (1918) изобретают электрическую счетную машину, которая работает с двоичными числами.
г. чешский писатель Карл Чапек написал пьесу «R. U. R.» («Россумские универсальные роботы»).
В этой пьесе, поставленной 21 января 1921 года на сцене Пражского национального театра, рассказывается о некоем Россуме, который основал фабрику, на которой биологическим путем выращивались роботы, отличавшиеся очень высокой работоспособностью. Несмотря на то, что эти создания сегодня получили бы скорее название «андроиды», чем «роботы», употребление слова «робот» стало повсеместным. «Роботы — это люди … они механически совершеннее нас, они обладают невероятно сильным интеллектом, но у них нет души», — таким образом, определяет понятие «робот» один из персонажей пьесы.
Так, впервые появилось понятие «робот», которое в скором времени из фантастической литературы перешло в науку и технику. Роботы в пьесе, изначально созданные для замены людей на заводах, вскоре вышли из-под контроля людей и начали уничтожать своих создателей. Так К. Чапек иллюстрирует мысль о том, что техника может приносить пользу человечеству, только находясь в честных, добрых руках. Таким образом, К. Чапек не только создал литературное произведение, но и поставил и рассмотрел ряд важных вопросов робототехники, таких как: способы создания роботов, их основные характеристики, размеры производства и области использования, социально-психологические аспекты взаимоотношения роботов и людей, самовоспроизведение роботов.
Ванневар Буш (1925) и его коллеги разрабатывают первую аналоговую ЭВМ Differential Analyzer, машина разработана, чтобы решать дифференциальные уравнения. Построенная в 1930, она будет использоваться для артиллерийских вычислений в течение Второй Мировой Войны.
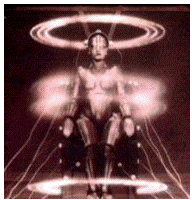
Фриц Ланг (1927) снимает «Metropolis». Робот Мария — первый робот в кинематографе. Созданная безумным ученым Ротвангом (Rotwang), чтобы заменить его умершую жену, гладкая металлическая женщина становится международной иконой.
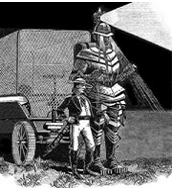
В 1928 г. Английский инженер Ричардсон создает электрического человека Эрика, внешне похожего на закованного в доспехи средневекового рыцаря. Эрик управляется на расстоянии. Выполняя команды, встает, садится, отвечает на простые вопросы; при ответе у него светятся глаза, а во рту загораются зеленые лампочки.
ПРОМЫШЛЕННЫЕ РОБОТЫ (4)
... качественно более высокий уровень. Появление и развитие промышленных роботов, безусловно, явились одним из крупнейших достижений науки и техники последних лет. Они позволили расширить фронт работ по автоматизации ... хотя бы по материалам данной книги. В нашей стране за короткие сроки создана целая сеть специализированных предприятий и организаций по роботостроению во многих машиностроительных и ...
На радиовыставке в Париже (1929) демонстрируется электрическая собака. Когда ее освещают, она начинает двигаться на свет и лаять. Если лампочку отводили в сторону, не переставая освещать собаку, последняя поворачивалась и продолжала лаять, двигаясь к источнику света.
В 1933 г. на выставке «Столетие прогресса» в Чикаго робот используется в качестве лектора. Начиная лекцию о процессе пищеварения, он расстегивал жилет, открывая грудь и живот, стенки которых были прозрачными, и показывал пальцем пищевод, желудок, кишечник и печень, объясняя строение своих внутренних органов наглядно.
В том же 1933 г. ряд роботов, управляемых по радио, сконструировал и построил в Австрии инженер Август Губер. Его роботы ходили, двигали головой и руками, мигали, курили, и разговаривали по телефону. Многие конструкторы в те годы отдали дань идее создания искусственного электромеханического человека — могучего и покорного слуги своего хозяина. Многие всерьез полагали, что именно такие роботы и заменят в будущем людей на заводах и фабриках. Однако в дальнейшем стало ясно, что подобные роботы — это пока, в сущности, такие же игрушки, какими были андроиды XVIII веков.
В 1937 г. Тезис Чёрча-Тьюринга, независимо разработанный Алонсо Чёрчем и Аланом Тьюрингом, устанавливает, что все задачи, решаемые человеком, приводимы к конечному множеству алгоритмов, или, более просто, что машинное распознавание и человеческое распознавание — по существу эквивалент.
г. Первый программируемый покрасочный механизм разработан Виллардом Поллардом и Гарольдом Розелундом для компании DeVilbiss. В действительности, история выглядит иначе.
В 1938 году американец Уиллар Л.В. Поллард действительно изобретает управляемый манипулятор. И не просто, а параллельный манипулятор! Три проксимальных звена управлялись двумя приводами на базе. Три дистальных звена крепились к проксимальным звеньям карданной передачей. Два из них крепились к третьему на шарнире. Головка распылителя крепится к третьему дистальному звену опять карданной передачей, обеспечивающей ей горизонтальный ход. Вертикальный и горизонтальный углы поворота головки управляются еще двумя приводами при помощи троса. Итого 5 степеней свободы.
Однако же, это был не первый робот-манипулятор и не тот, что достался компании DeVilbiss. Робот Уилларда Л.В. Полларда от 1938 года так и не был никогда построен.
Первый, действительно существовавший индустриальный робот, принадлежит другому Полларду. 29 октября 1934 года, Уиллард Л.Г. Поллард подал в бюро патентов заявку об изобретении нового полностью автоматического устройства для окраски поверхностей. Патент состоял из двух частей: электрической управляющей системы и механического манипулятора. Программа задавала скорость вращения приводов глубиной ямок на плотной перфоленте, а механическая часть робота представляла собой параллельный манипулятор по типу пантографа всего с двумя приводами. И хотя заявка была в 1934, с выдачей патента не спешили. Патент оказался на руках только в 1942 году, а между тем в 1937 году лицензия на производство этого манипулятора каким-то образом досталась компании DeVilbiss. Именно DeVilbiss в 1941 году при помощи Гарольда Роузланда построила первые прототипы этого устройства. Однако окончательная Роузландовская версия, выпущенная на рынок в 1944 году, была совсем другим механизмом, заимствовав у Полларда младшего только идею системы управления.
Часто в литературе выделяют несколько поколений роботов. Однако, это имеет непрямое отношение к развитию технологий. К роботам первого поколения обычно причисляют все копирующие и программируемые манипуляторы. Такие машины выполняют жесткую программу и чаще называются промышленными роботами. Роботы второго поколения оснащены датчиками для выполнения более интеллектуальных функций. Наконец, к роботам третьего поколения относятся автономные мобильные роботы с самостоятельной адаптивной программой. Примерами роботов I, II и III-го поколений будут, соответственно:
автоматическая линия по сортировке яблок по спелости
научно-исследовательские проекты для космоса и поиска новых решений.
Таким образом, это несколько отличается от поколений ЭВМ, поскольку ЭВМ разного поколения отличаются элементной базой, а роботы — возможностями. ЭВМ первого поколения можно увидеть разве что в музее, в то время как роботы разных поколений успешно работают вместе и нет особых причин для вымирания промышленных роботов с жесткой программой. Сам термин промышленный робот впервые появился на страницах американского журнала «American metal & market» в 1960 году.

Также в 1938 г. в МВТУ им. Баумана создана кафедра М-9, в дальнейшем получившая название «Многоцелевые гусеничные машины и мобильные роботы».
На всемирной выставке в Нью-Йорке (1939) Westinghouse Electric Corp., чтобы поразить посетителей, представляет механического гуманоидного робота Elektro и робота-собаку Sparko. Elektro весит 136 кг. и может ходить, разговаривать и… курить.
6 1940-е года
Джон Анатасоф и Клиффорд Берри (1940) предпринимают попытку построить электронный компьютер. Он мог бы стать первым в истории человечества электронным компьютером, но он не программировался. Труд 10.000 человек составляет Британское компьютерное военное усилие. Созданный на электромеханических реле Робинзон становится первым в мире операционным компьютером. Его мощности достаточно, чтобы декодировать сообщения, зашифрованные немецкой машиной Энигма первого поколения.
Конрад Цузе (1941) в Германии завершает Z-3, первый в мире полностью программируемый компьютер. Цузе приглашает Арнольда Фаста, слепого математика, программировать Z-3.
Открытие транзисторного эффекта Вадимом Евгеньевичем Лашкаревым. Это явление получило название p-n перехода.
Айзек Азимов (1942) впервые использует в своем рассказе «Runaround» слово «робототехника» и предсказывает развитие мощной робототехнической промышленности. В рассказе «Runaround» также впервые появляются «Три Закона Робототехники» Азимова:
- Робот не может причинить вред человеку или своим бездействием допустить, чтобы человеку был причинён вред.
- Робот должен подчинятся командам человека, если эти команды не противоречат первому закону.
- Робот должен заботиться о своей безопасности, пока это не противоречит первому и второму закону.
Впоследствии Азимов добавляет в этот список «Нулевой Закон»: Робот не может причинить вред человечеству или своим бездействием допустить, чтобы человечеству был причинён вред.
Эти три закона Айзека Азимова до сегодняшнего дня остаются стандартами при проектировании и разработке роботов.
В 1943 г. Артуро Розенблат, Норберт Винер и Джулиан Биглоу вводят в обращение термин «кибернетика».
Джордж Девол (1946) патентует универсальный прибор, использующий магнитное записывающее устройство для управления машинами.
7 1950-е года
Грей Уолтер (1950), английский нейрофизиолог, ставит свои знаменитые кибернетические эксперименты с «черепашками». «Черепашки» представляют собой самодвижущиеся электромеханические тележки, способные ползти на свет или от него, обходить препятствия, заходить в «кормушку» для подзарядки разрядившихся аккумуляторов.
В 1950 г. Алан Тьюринг в своей работе «Computing Machinery and Intelligence» описывает способ определения, является ли машина мыслящей, ставший известным как «критерий Тьюринга» («Turing Test»).
Критерий Тьюринга закладывает основу ежегодных соревнований между творцами думающих программ.
В 1951 г. в СССР выходит приказ о создании автоматических систем управления военной техникой. С этой целью в МВТУ им. Баумана создана кафедра СМ-7, впоследствии получившая название кафедры специальной робототехники и мехатроники.
Джордж Девол (1954) разрабатывает первого промышленного программируемого робота и вводит термин Universal Automation, который, по совету его жены Эвелин, впоследствии будет укорочен и даст название его будущей компании Unimation.
В 1955 г. программа SAGE закладывает начало будущей революции в автоматизированном проектировании.
В 1956 г. Джордж Девол и Джозеф Энгельбергер встречаются за коктейлем, чтобы обсудить написанное Айзеком Азимовым. Историческая встреча заканчивается соглашением о совместной работе по созданию роботов. Их новая компания будет называться Unimation, inc.
Также в 1956 г. Клод Шеннон в Массачусетском технологическом институте (MIT) выдвигает идею создания очувствленного робота. Аспирант института Генрих Эрнст (Heinrich Ernst) реализует эту идею и конструирует очувствленную руку-манипулятор, управляемую компьютером. Рука Эрнста собирала разбросанные по поверхности стола кубики и укладывала их в ящик.

В Беркли в 1956 г. создан мобильный робот, получивший имя Squee. Squee имеет четыре сенсора (два фотоэлемента и два контактных датчика), три электродвигателя (двигатель привода, двигатель поворота и двигатель, открывающий и закрывающий ковш, или «руки») и «мозг» из полдюжины реле. Squee охотится за «орехами» (теннисными шариками), которые освещают лучом света. Подобрав «орех», Squee отвозит его на освещаемую светом площадку и снова возвращается к охоте.
В 1958 г. Под руководством Н.П. Брусенцова в вычислительном центре Московского университета была создана и запущена в производство первая и единственная в мире троичная ЭВМ «Сетунь» (серийно выпускалась 1962-1964).
В 1959 г. Виктор Михайлович Глушков обнародовал идею «мозгоподобных» структур ЭВМ, в которых будут объединяться миллиарды процессорных элементов и может произойти слияние памяти с обработкой данных, так что данные будут обрабатываться по всей памяти с максимальным распараллеливанием операций.
8 1960-е года
В 1960 г. создан первый робот «Versatran», предназначенный для практического промышленного использования, разработан в компании AMF Джонсоном и Миленковичем.

В Университете Джона Хопкинса (1960) создано кибернетическое устройство, получившее известность как «Животное Хопкинса». Под управлением транзисторных схем «Животное» блуждало по коридорам физической лаборатории, пока не «чувствовало» разрядку аккумуляторных батарей. После чего с помощью специального оптического фотоэлемента начинало искать на белых стенах лаборатории черные розетки. Найдя такую розетку, «Животное» с помощью специальной чувствительной руки со штепселем заряжало свои батареи и снова переходило в режим «блуждания». Поведение «Животного» можно было сравнивать с поведением одноклеточных организмов, подобных амебе.
С космодрома Байконур (1961) осуществлен пуск ракеты-носителя «Молния», которая вывела на траекторию полета к Венере советскую автоматическую межпланетную станцию «Венера-1». В ходе этого полета впервые в истории осуществлена двусторонняя связь с автоматической станцией, удаленной на 1,400,000 км.
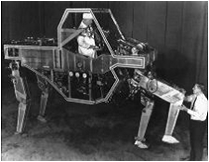
Ральф Мозер (1961) в General Electric начинает разработку стопоходящего грузовика. Машина будет иметь четыре ноги, весить 1300 кг. и иметь скорость до 4 миль в час.
Джо Энгельбергер (1962) внедряет первые разработанные Unimation промышленные роботы-манипуляторы на заводах автоконцерна General Motors в Нью Джерси. Простейшие контроллеры роботов считывают команды с магнитного барабана. Механические руки, получившие название Unimate, используются для выполнения наиболее неприятных операций при сборке автомобилей и позволяют перемещать 40-килограммовые детали в трёх плоскостях.
Автоматическая станция «Венера-3» впервые достигла поверхности Венеры в 1966 г., доставив вымпел СССР. Это был первый в мире перелет автоматического аппарата с Земли на другую планету.
В Стэнфордском институте начат проект по созданию мобильного робота, который может рассуждать об окружающей обстановке. Созданный робот за свою неустойчивость будет назван «Шейки» — трясучка.
Сеймур Паперт (1967) и его команда начинают работать над языком ЛОГО (LOGO).
Основой ЛОГО является своеобразный робот «черепашка», которому можно отдавать простые, интуитивно понятные команды. Базирующийся на LISP, ЛОГО станет одним из популярнейших средств обучения программированию.

Осьминогоподобный манипулятор разработан Марвином Мински в 1968. Двенадцать сочленений управлялись ЭВМ PDP-6. Манипулятор был способен поднять взрослого человека.
В 1969 г. Одо Студжер и Ричард Морли независимо разрабатывают Программируемый Логический Контроллер. Это изобретение производит поистине драматические изменения в робототехнике.
Виктор Шейнман (1969) в Стэнфордской лаборатории искусственного интеллекта создает манипулятор, получивший имя Стэнфордская рука. Кинематическая конфигурация этого манипулятора становится стандартом, известным как Стандартная Рука.

Стэнфордский интегральный робот Шейки (Shakey) представлен как первый мобильный робот, управляемый искусственным интеллектом. Шейки обеспечивал выполнение задания, даже если оно было сформулировано в самом общем виде. Робот мог действовать в помещениях, где находилось несколько недеформируемых предметов простой формы.

Система технического зрения позволяла ориентироваться в окружающей среде, избегать препятствий и принимать решения о дальнейшем маршруте. Шейки использовал бортовую ЭВМ SDS-940, телекамеру, лазерный дальномер и датчики столкновения на бампере, чтобы собрать данные, которые затем передавались по радиоканалу на стационарные ЭВМ PDP-10 и PDP-15 производства DEC. Обратные команды передавались также по радиоканалу, что позволяло Шейки перемещаться со скоростью 2 метра в час.
Хотя уже через два года финансирование проекта было прекращено, Стэнфордский мобильный робот стал одной из выдающихся вех в истории робототехники.
В этом же году, в СССР созданы первые интегральные исследовательские роботы ЛПИ-1, а чуть позднее — ЛПИ-2.
9 1970-е года
ноября 1970, ракета-носитель «Протон-К» вывела на траекторию полета к Луне автоматическую межпланетную станцию «Луна-17» с самоходным аппаратом «Луноход-1» на борту. 17.11.70 «Луна-17» совершила мягкую посадку в районе Моря Дождей.
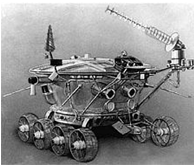
Через два с половиной часа «Луноход-1» по трапу сошел с посадочной платформы, приступив к выполнению исследовательской программы. «Луноход-1» был создан за несколько лет до запуска конструктором Григорием Николаевичем Бабакиным. Управление исследовательским аппаратом осуществлялось при помощи комплекса аппаратуры контроля и обработки телеметрической информации на базе ЭВМ «Минск-22». 20 февраля, по окончанию 4 лунного дня (лунный день длится две земные недели), ТАСС сообщил о полном выполнении первоначальной программы работ. Однако «Луноход-1» не собирался «умирать» и в три раза перекрыл свой первоначально рассчитанный ресурс. Колеса лунохода проложили по Луне дорожку длиной 10 540 м. Более чем в 500 точках ее были определены физические свойства грунта. Во время движения лунохода на Землю было передано около 25 тыс. снимков и 211 панорам лунной поверхности. Высадка мобильного автоматического аппарата на лунную поверхность стала очередной победой СССР в освоении космического пространства.
В Стэнфордском университете (1970) создан мобильный робот, ставший известным как Стэнфордская тележка. Робот разработан для задачи следования по линии, но может также управляться компьютером по радиоканалу.
Кеннет Колби и Сильвия Вебер представляют отчет о программном моделировании параноидального человека в статье, озаглавленной «Artificial Paranoia». Программа PARRY так убеждает, что клинические психиатры не могут отличить ее поведение от реального параноика.
Робототехника в 1971 официально признана в СССР как новое научное направление. Академик Евгений Павлович Попов в МВТУ возглавляет кафедру специальной робототехники и мехатроники. Под его началом создается научная школа, ставшая оплотом робототехники в стране. Одними из первых работ становятся разработки системы обслуживания термоядерного реактора и систем управления манипуляторами в экстремальных условиях.
В Институте Кибернетики под руководством академика Николая Михайловича Амосова создан автономный транспортный робот «ТАИР»(1972).
Робот представляет собой трехколесную самоходную тележку, снабженную системой датчиков (дальномер и тактильные датчики), и управляется аппаратно реализованной нейронной сетью (узлы сети — специальные электронные схемы, собранные на транзисторах).
Робот демонстрирует целенаправленное движение в естественной среде и обход препятствий в виде людей, деревьев, скамеек. Цель движения робота задается координатами точки на местности.
- Группа Робототехники в Эдинбургском университете строит Фредди — известного шотландского робота, использующего систему технического зрения, чтобы собирать предметы автоматически из кучи частей.
В Советском Союзе выходит первая в мире «Энциклопедия кибернетики». В подготовке энциклопедии приняли участие более 100 ведущих ученых СССР (1974).
Дуглас Ленат (1976) демонстрирует систему искусственного интеллекта Автоматизированный Математик, как часть своей докторской диссертации в Стэнфорде. Интеллект AM позволяет производить свободно-управляемый поиск интересных предположений и делать «открытия» в теории чисел и абстрактной математике.
Под руководством В.С. Бурцева в 1977 создан первый симметричный многопроцессорный вычислительный комплекс (МВК) «Эльбрус-1» на ИС средней интеграции со средствами аппаратной поддержки развитой структуризации программ и данных. СССР начинает уверенно лидировать в строительстве суперкомпьютеров.
В СССР создан интегральный робот «Кентавр» (1977) для межпланетных исследований. Робот построен по колесной формуле — 6х6 и управляется вычислительным комплексом М-6000. Информация о внешней среде поступает от лазерного сканирующего измерителя расстояний и тактильной системы, построенной на микровыключателях и упругих чувствительных элементах. Навигационная система состоит из гироскопа и системы счисления пути с одометром.
— В СССР в Институте Кибернетики под руководством Н.М. Амосова создан робот МАЛЫШ, управляемый обучающейся нейронной сетью. Робот объезжает препятствия в естественной среде. На МАЛЫШЕ проведен ряд фундаментальных исследований в области создания обучающихся роботов с нейросетевыми системами управления.
10 1980-1990-е года
Начаты продажи персонального робота HERO 1 (1982).
На управляющей плате HERO микропроцессор 6808, 8K ROM, 4K RAM. Робот снабжен 7-сегментным дисплеем. Дополнительно поставляются расширительные платы памяти и интерфейса RS-232.
В 1983г. по заказу КГБ в МВТУ им. Баумана (кафедра СМ-7) создан мобильный робот, работающий со взрывоопасными предметами в составе подразделений по борьбе с терроризмом.
В США, в 1985 появляется в продаже домашний робот RB5X. Его можно запрограммировать на речь, перемещения по комнате и выполнение несложных заданий по доставке предметов.
Совместно Академией бронетанковых войск МО, МВТУ им. Баумана, Государственным институтом физико-технических проблем и другими организациями разработан, изготовлен и испытан в 1991 автономный интеллектуальный робототехнический комплекс на базе танка. Комплекс оснащен интегрированной информационно-управляющей системой, бортовой встроенной системой искусственного интеллекта и системой дистанционного управления. Исполнительные устройства управляют движением и системой управления оружием. На роботе-танке исследованы возможности повышения эффективности бронетанковой техники путем перераспределения решаемых задач между человеком и машиной.
На основе исследований в 1995, создана первая робототехническая хирургическая система Intuitive Surgical.
Первый футбольный турнир среди роботов RoboCup (1997) проводится в Нагойя (Япония).
В турнире участвуют 40 команд в трех классах. Соревнования посетили около 7000 зрителей. Во время первого чемпионата роботам было сложно даже просто найти мяч. А когда он, наконец, попадал к игроку, последний часто отправлял его в собственные ворота.
В Исследовательском центре Xerox в Пало-Альто создан модульный самореконфигурируемый робот PolyBot G1. Основанный на стэнфордских разработках Марка Йима робот состоит из модулей на основе микроконтроллера 68HC11. В кубических модулях размером около 5-ти сантиметров применены стандартные сервомоторчики, используемые в RC-хобби.

1998. «Больницы — это та самая окружающая среда, которая идеально подходит для использования роботов», — сообщает Джозеф Энгельбергер, представляя робота-помощника HelpMate Trackless Robotic Courier. Обладая грузоподъемностью около 100 кг, робот может объезжать препятствия без посторонней помощи, используя ультразвуковые и инфракрасные датчики, и даже подниматься и спускаться по лестнице. Для передвижения роботу не требуется прочерченная на полу линия, что Энгельбергер считает огромным шагом вперед.
— NEC представляет яйцевидный трехколесный домашний робот R100, повинующийся голосовым командам. R100 записывает и отправляет видеопочту по Интернет, а также может включать кондиционеры, телевизоры и видеомагнитофоны посредством инфракрасного пульта дистанционного управления. Видеосистема способна распознавать до десятка разных людей. Рост робота — 44 см, вес — 7 кг, словарный запас — около 300 фраз. В новой модификации, которая появится в 2004 г. и получит имя PaPeRo (Partner-type Personal Robot), робот будет способен на слух и практически синхронно переводить с японского языка на английский и наоборот.
11 21 век
Кевин Уорвик (2000) в Орегонском университете создает первого киборга (кибернетический организм).
В небольшой стандартный робот Khepera включены элементы мозга морской змеи. Соединенный с сенсорами мозг реагирует на световые сигналы, перемещаясь в тень при освещении сенсоров. Работы ведутся Орегонским, Чикагским и Иллинойским университетами США, а также университетом Генуи, Италия.
Синтия Брезел (2001), работающая над проектом социально организованных роботов, ставит цель — научить робот KISMET не только думать, но и понимать, что всякие действия имеют последствия. Так ребенок учится вести себя через взаимодействие с другими детьми и взрослыми. Управлять своим социальным поведением и выражением лица роботу помогают 15 внешних компьютеров.
— В мюнхенском Институте биохимии имени Макса Планка создан первый в мире нейрочип. Микросхема, изготовленная Питером Фромгерцом и Гюнтером Зеком, сочетает в себе электронные элементы и нервные клетки. Около 20 нейронов улитки помещены в кремниевую микросхему. Соседние нервные клетки образуют контакты друг с другом и с микросхемой. Первые эксперименты начались в 1985 году, когда делались попытки зарегистрировать активность отдельного нейрона пиявки при помощи транзистора.
Японский изобретатель робота-собаки Aibo Масахиро Фудзита (2003) из лаборатории Sony выступает с заявлением о недопустимости использования роботов в ситуациях конфликта, подобных войне в Ираке. «Пока ещё очень трудно понять, могут ли роботы биться друг с другом, но посредством Интернета хакер или какой-другой плохой парень может легко управлять ими и вредить людям», — подчеркнул Фудзита.
Профессор австралийского университета Monash Энди Рассел (2003) создает робота RAT, распознающего запахи. Робот диаметром 10 см оснащён четырьмя типами датчиков — химическим, ультразвуковым, воздушным и тактильным. Он способен следовать за запахом через построенный в лаборатории лабиринт.
В России, в 2004 г. создан робот нового поколения, способный обнаруживать и обезвреживать взрывные устройства. Робот, разработанный учеными РАН из лаборатории «Сенсорика», способен проникать и доставлять в труднодоступные зоны средства наблюдения и разведки, а также осматривать подозрительные объекты и в случае необходимости осуществлять их транспортировку или разминирование. Робот может работать индивидуально или в группе аналогичных машин, а также совместно с создаваемыми в лаборатории средствами воздушной разведки и связи — малогабаритными дистанционно пилотируемыми летательными аппаратами.
В 2005 году, в университете Карнеги-Меллона разработан военный робот Gladiator. Робот может дистанционно управляться джойстиком. На специальном шлеме оборудован окуляр, с помощью которого солдат может видеть то же, что и робот, находящийся в нескольких километрах от пункта управления.

Робот, созданный Юничи Такено (2005) и командой разработчиков из университета Мейдзи в Японии, способен увидеть разницу между зеркальным отражением себя самого и другого робота, который выглядит точно так же. Робот основывается на анализе движений увиденного образа и своих собственных. В результате он способен отличить своё зеркальное отражение от находящегося рядом идентичного робота, копирующего его движения. Примерно в 70% случаев робот понимает, что зеркальное отражение — это он сам.
Международный институт передовых телекоммуникационных исследований (2006) совместно с компанией Honda разработал новый тип связи между человеком и машиной. Робот-манипулятор подчинялся мыслям испытуемого без всякой видимой связи с ним. Новый интерфейс мозг-машина (Brain Machine Interface) основан на ежесекундном анализе картины активности участков мозга.
Миниатюрные роботы-коллективисты способны взаимодействовать друг с другом и обмениваться информацией. У каждого бота имеется произвольный набор параметров — «генов», определяющих поведение. В процессе исследований отбирали ботов, наиболее эффективно отыскивающих пищу. Их «геномы» затем смешивались, что приводило к постепенной эволюции.
Заключение
Рассмотрев историю создания роботов и развития робототехники и опираясь на цели и задачи, заявленные мной в самом начале, можно сделать следующие выводы:
- Рассмотрев необходимые определения по данной теме, и раскрыв их суть, лучше понимаешь суть данных приборов и то, в чем заключаются многочисленные этические споры вокруг них.
- Роботы активно влились в жизнь человечества, о чем свидетельствуют многочисленные киноленты и то, что сферу их применения все больше и больше расширяют в сторону решения обычных задач.
- Люди активно рассуждают и думают над дальнейшей судьбой и будущим данного направления техники, понимая, что в их руках находятся такие знания, которые при неправильном использовании могут навредить всему человечеству.
- На данный момент основным направлением в создании роботов является то, что нужно сделать их более самостоятельными, более думающими и мыслящими.
Ученые пытаются создать прототип себе, способного применять свои знания и умения без команд.
- Созданные роботы применяются в основном в улучшении и облегчении жизнедеятельности, без внедрения каких-либо опасных предметов или вооружения, хотя есть и такие варианты.
- Особенность данной науки в том, что некоторые очень важные направления ее развития и пункты определяли не ученые, а писатели-фантасты.
- В основном робототехника — это программирование, создание определённых компьютерных языков, плат, систем.
- Очень примечательно было узнать, как создание роботов проходило в самом начале, что это считалось искусством, выполнялось с микроскопической точностью, что было достаточно сложно для того времени.
Список литературы
[Электронный ресурс]//URL: https://drprom.ru/referat/istoriya-razvitiya-robotov/
1. Боголюбов А.Н., Никитин Д.А. Популярно о робототехнике. — Киев: Наук. Думка, 1989. — 200 с.
— Лукьянова Е.В. Робототехника и искусственный интеллект. Опыт Японии // Искусственный интеллект: философия, методология, инновации. Материалы Пятой Всероссийской конференции студентов, аспирантов и молодых учёных (г. Москва, МГТУ МИРЭА, 9-11 ноября 2011 г.) // Под ред. Д.И. Дубровского и Е.А. Никитиной. — М.: «Радио и Связь», 2011. — С. 236-238.
3. Макаров И.М., Топчиев Ю.И. Робототехника: история и перспективы. — М.: Наука, Издательство МАИ, 2003. — 350 с.
4.Янг Дж.Ф. Робототехника / Справочный материал. — Машиностроение, 1979
Список используемых Интернет-ресурсов:
- Хронология робототехники. // Мой робот. [Электронный ресурс]. URL: http://www.myrobot.ru/articles/hist_2005.php. Доступ с экрана.
- Прошлое и будущее робототехники.//Клеверенс.
[Электронный ресурс]. URL: http://www.cleverence.ru/site.aspx?page=Robotics. Доступ с экрана.
- История робототехники: факты // ПРОробот.ру. [Электронный ресурс]. / Автор: Владимир Канивец. Дата создания: 26.04.2008. URL: http://www.prorobot.ru/slovarik/is_istorii_robototehniki.php. Доступ с экрана.
- Краткая история робототехники// Киборги.
[Электронный ресурс]. Автор: Василий Дорнобергер. Дата создания: 29.05.2012. URL: . Доступ с экрана.